 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Assignment Techniques For Vehicle Tracking
Paper and Code
Feb 11, 2017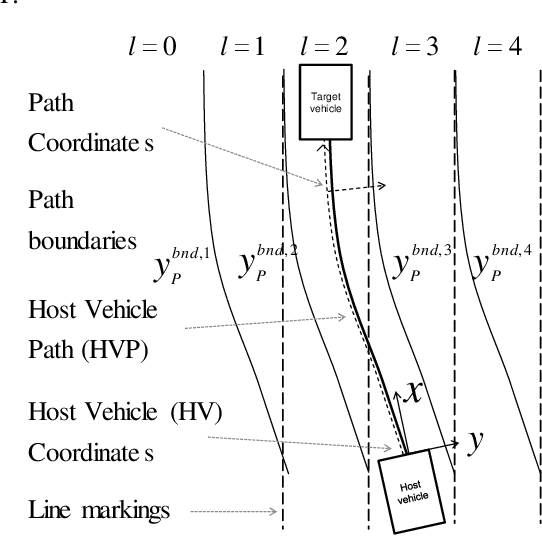
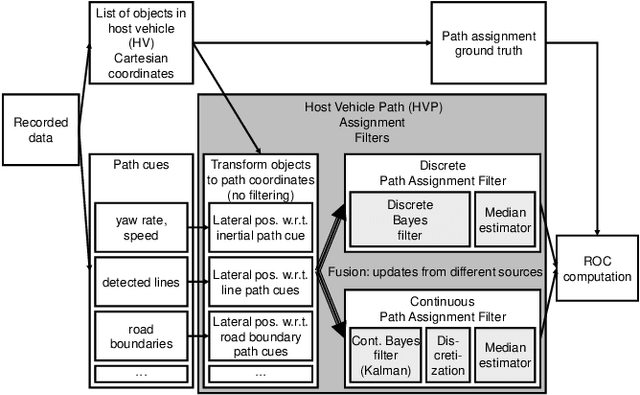
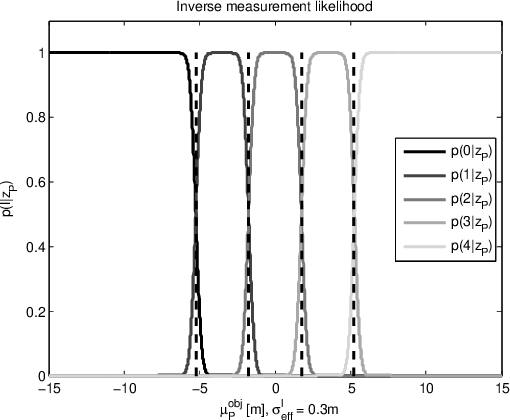
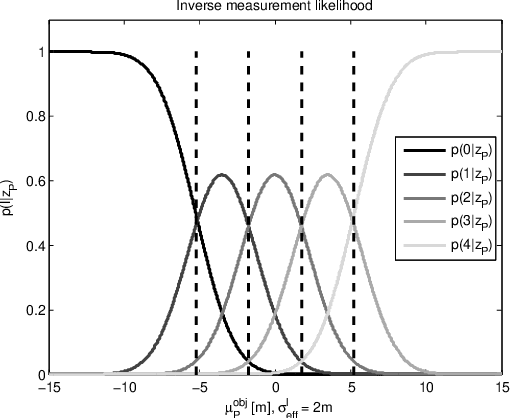
Many driver assistance systems such as Adaptive Cruise Control require the identification of the closest vehicle that is in the host vehicle's path. This entails an assignment of detected vehicles to the host vehicle path or neighboring paths. After reviewing approaches to the estimation of the host vehicle path and lane assignment techniques we introduce two methods that are motivated by the rationale to filter measured data as late in the processing stages as possible in order to avoid delays and other artifacts of intermediate filters. These filters generate discrete posterior probability distributions from which a path or "lane" index is extracted by a median estimator. The relative performance of those methods is illustrated by a ROC using experimental data and labeled ground truth data.