 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntroducing Milabench: Benchmarking Accelerators for AI
Nov 18, 2024



AI workloads, particularly those driven by deep learning, are introducing novel usage patterns to high-performance computing (HPC) systems that are not comprehensively captured by standard HPC benchmarks. As one of the largest academic research centers dedicated to deep learning, Mila identified the need to develop a custom benchmarking suite to address the diverse requirements of its community, which consists of over 1,000 researchers. This report introduces Milabench, the resulting benchmarking suite. Its design was informed by an extensive literature review encompassing 867 papers, as well as surveys conducted with Mila researchers. This rigorous process led to the selection of 26 primary benchmarks tailored for procurement evaluations, alongside 16 optional benchmarks for in-depth analysis. We detail the design methodology, the structure of the benchmarking suite, and provide performance evaluations using GPUs from NVIDIA, AMD, and Intel. The Milabench suite is open source and can be accessed at github.com/mila-iqia/milabench.
Learning Neural Causal Models with Active Interventions
Sep 06, 2021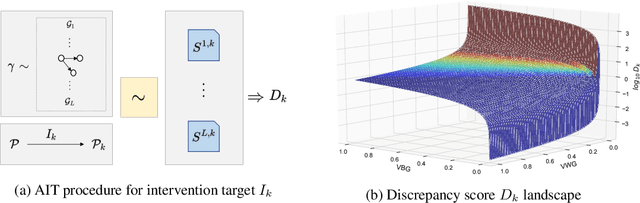
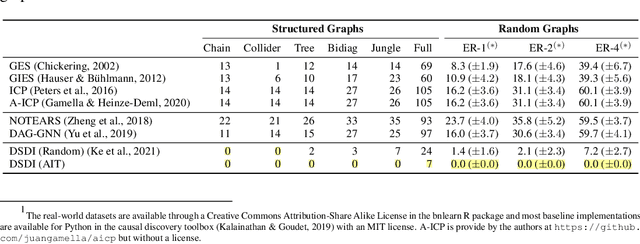
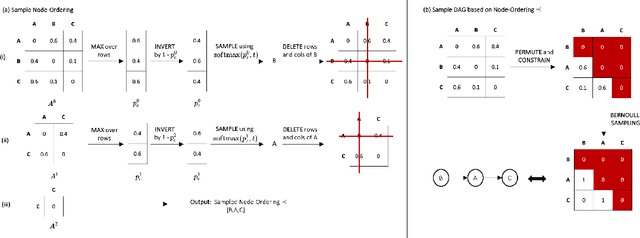
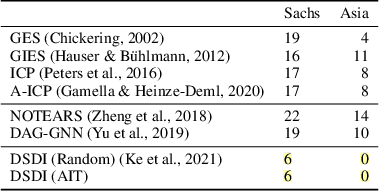
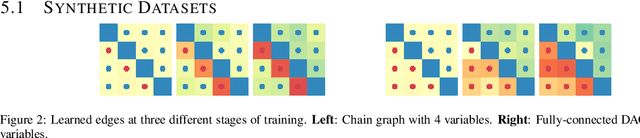
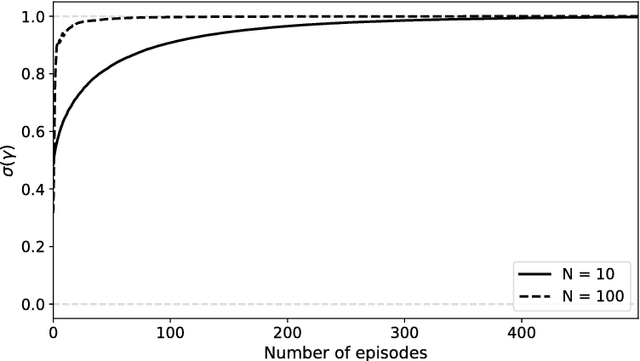
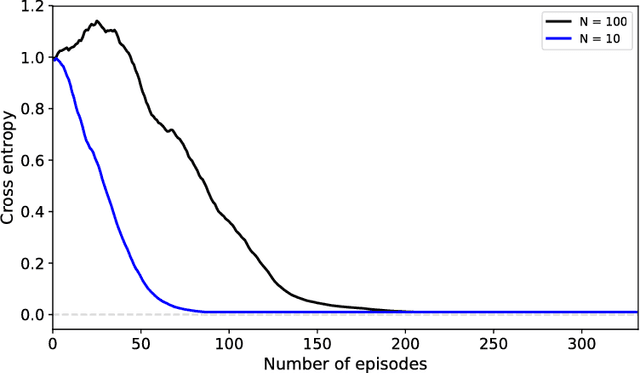
Discovering causal structures from data is a challenging inference problem of fundamental importance in all areas of science. The appealing scaling properties of neural networks have recently led to a surge of interest in differentiable neural network-based methods for learning causal structures from data. So far differentiable causal discovery has focused on static datasets of observational or interventional origin. In this work, we introduce an active intervention-targeting mechanism which enables a quick identification of the underlying causal structure of the data-generating process. Our method significantly reduces the required number of interactions compared with random intervention targeting and is applicable for both discrete and continuous optimization formulations of learning the underlying directed acyclic graph (DAG) from data. We examine the proposed method across a wide range of settings and demonstrate superior performance on multiple benchmarks from simulated to real-world data.
COVI-AgentSim: an Agent-based Model for Evaluating Methods of Digital Contact Tracing
Oct 30, 2020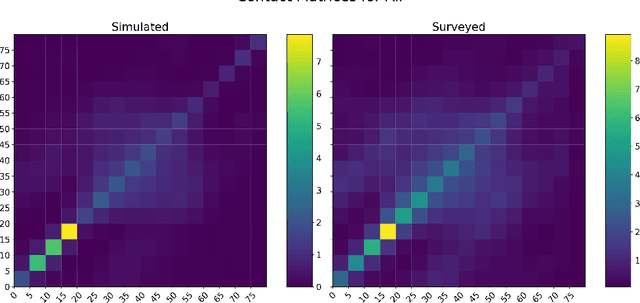
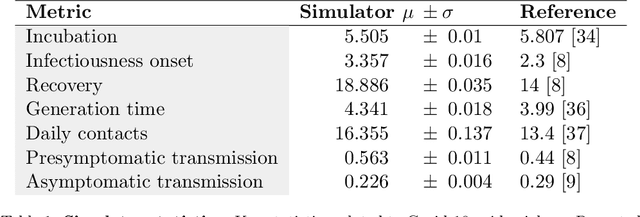
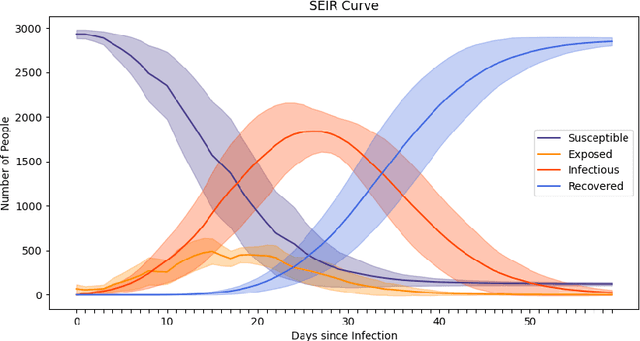
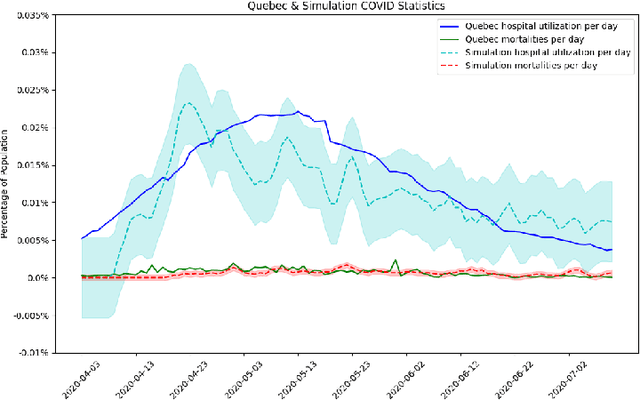
The rapid global spread of COVID-19 has led to an unprecedented demand for effective methods to mitigate the spread of the disease, and various digital contact tracing (DCT) methods have emerged as a component of the solution. In order to make informed public health choices, there is a need for tools which allow evaluation and comparison of DCT methods. We introduce an agent-based compartmental simulator we call COVI-AgentSim, integrating detailed consideration of virology, disease progression, social contact networks, and mobility patterns, based on parameters derived from empirical research. We verify by comparing to real data that COVI-AgentSim is able to reproduce realistic COVID-19 spread dynamics, and perform a sensitivity analysis to verify that the relative performance of contact tracing methods are consistent across a range of settings. We use COVI-AgentSim to perform cost-benefit analyses comparing no DCT to: 1) standard binary contact tracing (BCT) that assigns binary recommendations based on binary test results; and 2) a rule-based method for feature-based contact tracing (FCT) that assigns a graded level of recommendation based on diverse individual features. We find all DCT methods consistently reduce the spread of the disease, and that the advantage of FCT over BCT is maintained over a wide range of adoption rates. Feature-based methods of contact tracing avert more disability-adjusted life years (DALYs) per socioeconomic cost (measured by productive hours lost). Our results suggest any DCT method can help save lives, support re-opening of economies, and prevent second-wave outbreaks, and that FCT methods are a promising direction for enriching BCT using self-reported symptoms, yielding earlier warning signals and a significantly reduced spread of the virus per socioeconomic cost.
Learning Neural Causal Models from Unknown Interventions
Oct 02, 2019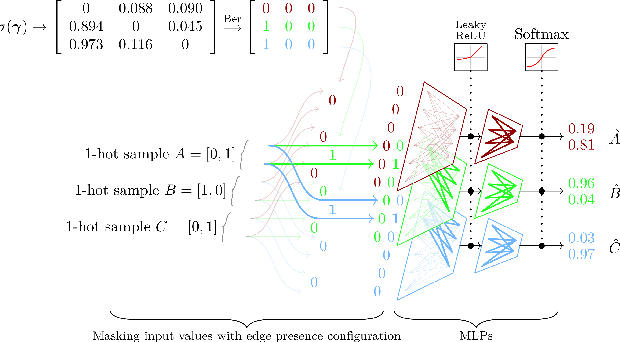


Meta-learning over a set of distributions can be interpreted as learning different types of parameters corresponding to short-term vs long-term aspects of the mechanisms underlying the generation of data. These are respectively captured by quickly-changing parameters and slowly-changing meta-parameters. We present a new framework for meta-learning causal models where the relationship between each variable and its parents is modeled by a neural network, modulated by structural meta-parameters which capture the overall topology of a directed graphical model. Our approach avoids a discrete search over models in favour of a continuous optimization procedure. We study a setting where interventional distributions are induced as a result of a random intervention on a single unknown variable of an unknown ground truth causal model, and the observations arising after such an intervention constitute one meta-example. To disentangle the slow-changing aspects of each conditional from the fast-changing adaptations to each intervention, we parametrize the neural network into fast parameters and slow meta-parameters. We introduce a meta-learning objective that favours solutions robust to frequent but sparse interventional distribution change, and which generalize well to previously unseen interventions. Optimizing this objective is shown experimentally to recover the structure of the causal graph.
A Meta-Transfer Objective for Learning to Disentangle Causal Mechanisms
Feb 04, 2019

We propose to meta-learn causal structures based on how fast a learner adapts to new distributions arising from sparse distributional changes, e.g. due to interventions, actions of agents and other sources of non-stationarities. We show that under this assumption, the correct causal structural choices lead to faster adaptation to modified distributions because the changes are concentrated in one or just a few mechanisms when the learned knowledge is modularized appropriately. This leads to sparse expected gradients and a lower effective number of degrees of freedom needing to be relearned while adapting to the change. It motivates using the speed of adaptation to a modified distribution as a meta-learning objective. We demonstrate how this can be used to determine the cause-effect relationship between two observed variables. The distributional changes do not need to correspond to standard interventions (clamping a variable), and the learner has no direct knowledge of these interventions. We show that causal structures can be parameterized via continuous variables and learned end-to-end. We then explore how these ideas could be used to also learn an encoder that would map low-level observed variables to unobserved causal variables leading to faster adaptation out-of-distribution, learning a representation space where one can satisfy the assumptions of independent mechanisms and of small and sparse changes in these mechanisms due to actions and non-stationarities.
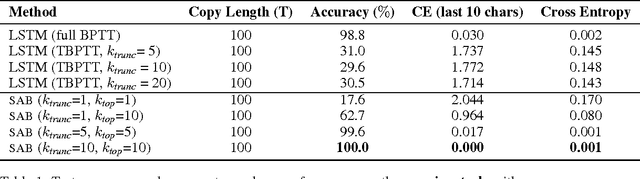
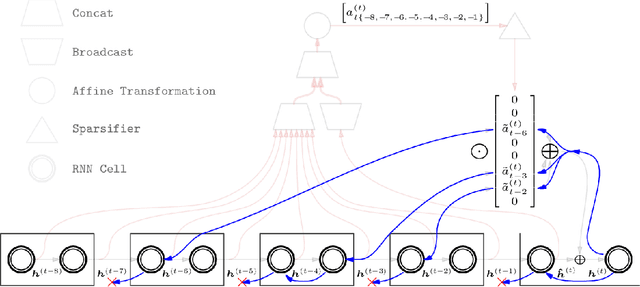
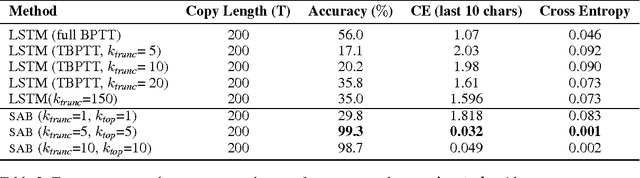
Sparse Attentive Backtracking: Temporal CreditAssignment Through Reminding
Sep 11, 2018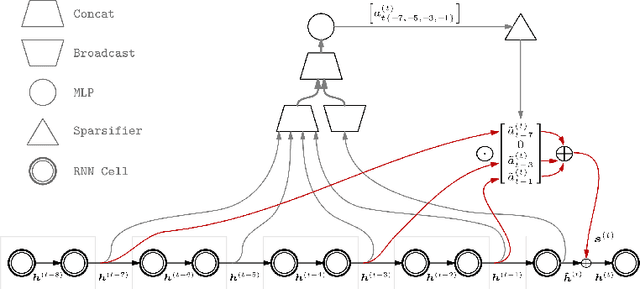
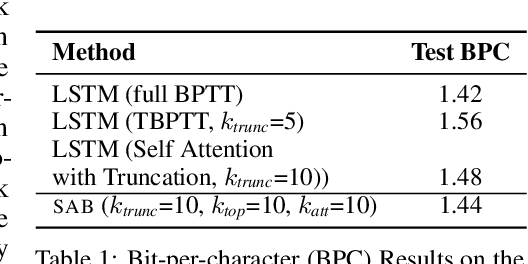
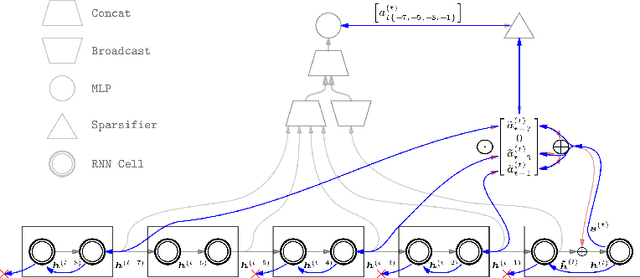
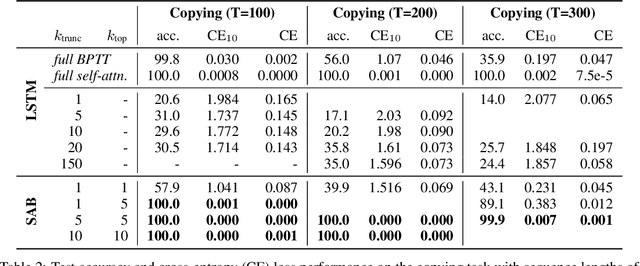
Learning long-term dependencies in extended temporal sequences requires credit assignment to events far back in the past. The most common method for training recurrent neural networks, back-propagation through time (BPTT), requires credit information to be propagated backwards through every single step of the forward computation, potentially over thousands or millions of time steps. This becomes computationally expensive or even infeasible when used with long sequences. Importantly, biological brains are unlikely to perform such detailed reverse replay over very long sequences of internal states (consider days, months, or years.) However, humans are often reminded of past memories or mental states which are associated with the current mental state. We consider the hypothesis that such memory associations between past and present could be used for credit assignment through arbitrarily long sequences, propagating the credit assigned to the current state to the associated past state. Based on this principle, we study a novel algorithm which only back-propagates through a few of these temporal skip connections, realized by a learned attention mechanism that associates current states with relevant past states. We demonstrate in experiments that our method matches or outperforms regular BPTT and truncated BPTT in tasks involving particularly long-term dependencies, but without requiring the biologically implausible backward replay through the whole history of states. Additionally, we demonstrate that the proposed method transfers to longer sequences significantly better than LSTMs trained with BPTT and LSTMs trained with full self-attention.
Deep Complex Networks
Feb 25, 2018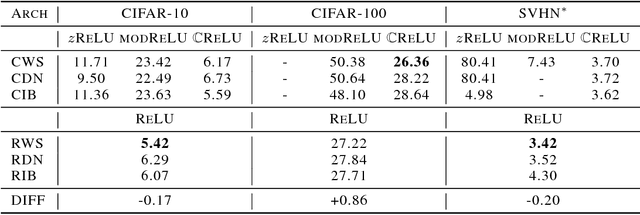
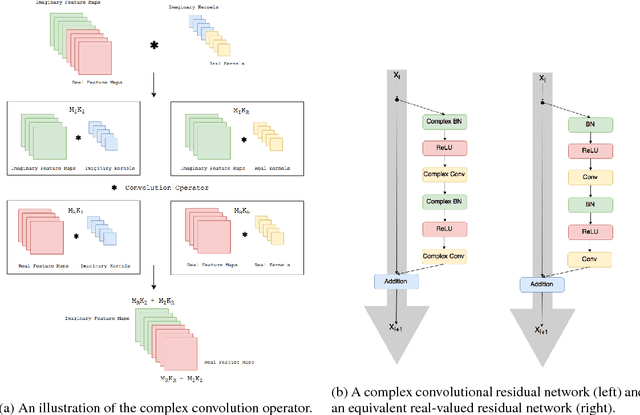

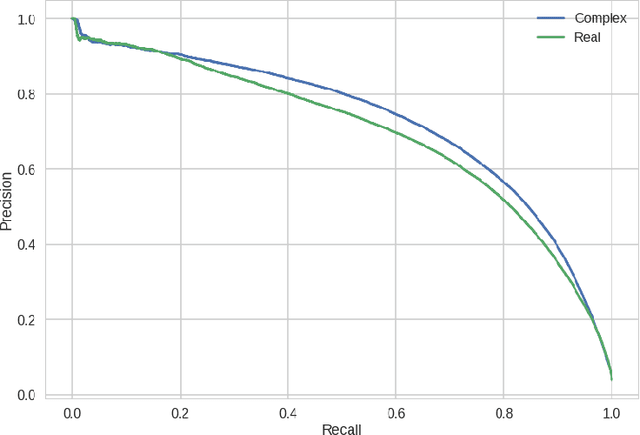
At present, the vast majority of building blocks, techniques, and architectures for deep learning are based on real-valued operations and representations. However, recent work on recurrent neural networks and older fundamental theoretical analysis suggests that complex numbers could have a richer representational capacity and could also facilitate noise-robust memory retrieval mechanisms. Despite their attractive properties and potential for opening up entirely new neural architectures, complex-valued deep neural networks have been marginalized due to the absence of the building blocks required to design such models. In this work, we provide the key atomic components for complex-valued deep neural networks and apply them to convolutional feed-forward networks and convolutional LSTMs. More precisely, we rely on complex convolutions and present algorithms for complex batch-normalization, complex weight initialization strategies for complex-valued neural nets and we use them in experiments with end-to-end training schemes. We demonstrate that such complex-valued models are competitive with their real-valued counterparts. We test deep complex models on several computer vision tasks, on music transcription using the MusicNet dataset and on Speech Spectrum Prediction using the TIMIT dataset. We achieve state-of-the-art performance on these audio-related tasks.
Sparse Attentive Backtracking: Long-Range Credit Assignment in Recurrent Networks
Nov 07, 2017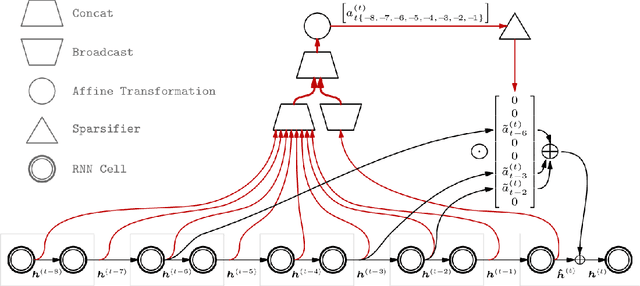
A major drawback of backpropagation through time (BPTT) is the difficulty of learning long-term dependencies, coming from having to propagate credit information backwards through every single step of the forward computation. This makes BPTT both computationally impractical and biologically implausible. For this reason, full backpropagation through time is rarely used on long sequences, and truncated backpropagation through time is used as a heuristic. However, this usually leads to biased estimates of the gradient in which longer term dependencies are ignored. Addressing this issue, we propose an alternative algorithm, Sparse Attentive Backtracking, which might also be related to principles used by brains to learn long-term dependencies. Sparse Attentive Backtracking learns an attention mechanism over the hidden states of the past and selectively backpropagates through paths with high attention weights. This allows the model to learn long term dependencies while only backtracking for a small number of time steps, not just from the recent past but also from attended relevant past states.
Feedforward Initialization for Fast Inference of Deep Generative Networks is biologically plausible
Jun 28, 2016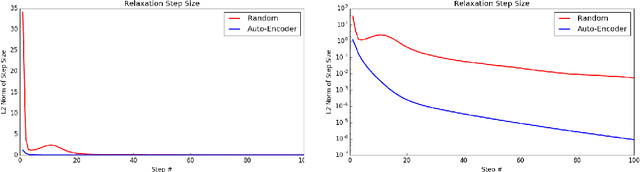
We consider deep multi-layered generative models such as Boltzmann machines or Hopfield nets in which computation (which implements inference) is both recurrent and stochastic, but where the recurrence is not to model sequential structure, only to perform computation. We find conditions under which a simple feedforward computation is a very good initialization for inference, after the input units are clamped to observed values. It means that after the feedforward initialization, the recurrent network is very close to a fixed point of the network dynamics, where the energy gradient is 0. The main condition is that consecutive layers form a good auto-encoder, or more generally that different groups of inputs into the unit (in particular, bottom-up inputs on one hand, top-down inputs on the other hand) are consistent with each other, producing the same contribution into the total weighted sum of inputs. In biological terms, this would correspond to having each dendritic branch correctly predicting the aggregate input from all the dendritic branches, i.e., the soma potential. This is consistent with the prediction that the synaptic weights into dendritic branches such as those of the apical and basal dendrites of pyramidal cells are trained to minimize the prediction error made by the dendritic branch when the target is the somatic activity. Whereas previous work has shown how to achieve fast negative phase inference (when the model is unclamped) in a predictive recurrent model, this contribution helps to achieve fast positive phase inference (when the target output is clamped) in such recurrent neural models.