 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntroducing Milabench: Benchmarking Accelerators for AI
Nov 18, 2024



AI workloads, particularly those driven by deep learning, are introducing novel usage patterns to high-performance computing (HPC) systems that are not comprehensively captured by standard HPC benchmarks. As one of the largest academic research centers dedicated to deep learning, Mila identified the need to develop a custom benchmarking suite to address the diverse requirements of its community, which consists of over 1,000 researchers. This report introduces Milabench, the resulting benchmarking suite. Its design was informed by an extensive literature review encompassing 867 papers, as well as surveys conducted with Mila researchers. This rigorous process led to the selection of 26 primary benchmarks tailored for procurement evaluations, alongside 16 optional benchmarks for in-depth analysis. We detail the design methodology, the structure of the benchmarking suite, and provide performance evaluations using GPUs from NVIDIA, AMD, and Intel. The Milabench suite is open source and can be accessed at github.com/mila-iqia/milabench.
CtRL-Sim: Reactive and Controllable Driving Agents with Offline Reinforcement Learning
Mar 29, 2024


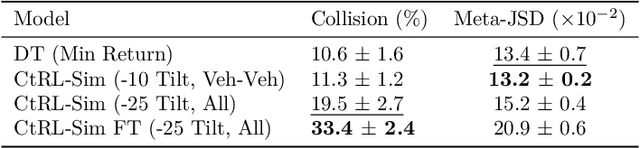
Evaluating autonomous vehicle stacks (AVs) in simulation typically involves replaying driving logs from real-world recorded traffic. However, agents replayed from offline data do not react to the actions of the AV, and their behaviour cannot be easily controlled to simulate counterfactual scenarios. Existing approaches have attempted to address these shortcomings by proposing methods that rely on heuristics or learned generative models of real-world data but these approaches either lack realism or necessitate costly iterative sampling procedures to control the generated behaviours. In this work, we take an alternative approach and propose CtRL-Sim, a method that leverages return-conditioned offline reinforcement learning within a physics-enhanced Nocturne simulator to efficiently generate reactive and controllable traffic agents. Specifically, we process real-world driving data through the Nocturne simulator to generate a diverse offline reinforcement learning dataset, annotated with various reward terms. With this dataset, we train a return-conditioned multi-agent behaviour model that allows for fine-grained manipulation of agent behaviours by modifying the desired returns for the various reward components. This capability enables the generation of a wide range of driving behaviours beyond the scope of the initial dataset, including those representing adversarial behaviours. We demonstrate that CtRL-Sim can efficiently generate diverse and realistic safety-critical scenarios while providing fine-grained control over agent behaviours. Further, we show that fine-tuning our model on simulated safety-critical scenarios generated by our model enhances this controllability.