 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Learnable Anchor for Deep Multi-View Clustering
Mar 16, 2025


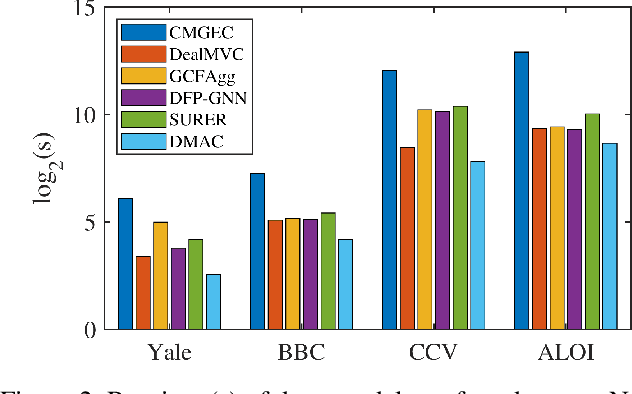
Deep multi-view clustering incorporating graph learning has presented tremendous potential. Most methods encounter costly square time consumption w.r.t. data size. Theoretically, anchor-based graph learning can alleviate this limitation, but related deep models mainly rely on manual discretization approaches to select anchors, which indicates that 1) the anchors are fixed during model training and 2) they may deviate from the true cluster distribution. Consequently, the unreliable anchors may corrupt clustering results. In this paper, we propose the Deep Multi-view Anchor Clustering (DMAC) model that performs clustering in linear time. Concretely, the initial anchors are intervened by the positive-incentive noise sampled from Gaussian distribution, such that they can be optimized with a newly designed anchor learning loss, which promotes a clear relationship between samples and anchors. Afterwards, anchor graph convolution is devised to model the cluster structure formed by the anchors, and the mutual information maximization loss is built to provide cross-view clustering guidance. In this way, the learned anchors can better represent clusters. With the optimal anchors, the full sample graph is calculated to derive a discriminative embedding for clustering. Extensive experiments on several datasets demonstrate the superior performance and efficiency of DMAC compared to state-of-the-art competitors.
Towards Robust Uncertainty-Aware Incomplete Multi-View Classification
Sep 10, 2024



Handling incomplete data in multi-view classification is challenging, especially when traditional imputation methods introduce biases that compromise uncertainty estimation. Existing Evidential Deep Learning (EDL) based approaches attempt to address these issues, but they often struggle with conflicting evidence due to the limitations of the Dempster-Shafer combination rule, leading to unreliable decisions. To address these challenges, we propose the Alternating Progressive Learning Network (APLN), specifically designed to enhance EDL-based methods in incomplete MVC scenarios. Our approach mitigates bias from corrupted observed data by first applying coarse imputation, followed by mapping the data to a latent space. In this latent space, we progressively learn an evidence distribution aligned with the target domain, incorporating uncertainty considerations through EDL. Additionally, we introduce a conflict-aware Dempster-Shafer combination rule (DSCR) to better handle conflicting evidence. By sampling from the learned distribution, we optimize the latent representations of missing views, reducing bias and enhancing decision-making robustness. Extensive experiments demonstrate that APLN, combined with DSCR, significantly outperforms traditional methods, particularly in environments characterized by high uncertainty and conflicting evidence, establishing it as a promising solution for incomplete multi-view classification.
Beyond Uncertainty: Evidential Deep Learning for Robust Video Temporal Grounding
Aug 29, 2024Existing Video Temporal Grounding (VTG) models excel in accuracy but often overlook open-world challenges posed by open-vocabulary queries and untrimmed videos. This leads to unreliable predictions for noisy, corrupted, and out-of-distribution data. Adapting VTG models to dynamically estimate uncertainties based on user input can address this issue. To this end, we introduce SRAM, a robust network module that benefits from a two-stage cross-modal alignment task. More importantly, it integrates Deep Evidential Regression (DER) to explicitly and thoroughly quantify uncertainty during training, thus allowing the model to say "I do not know" in scenarios beyond its handling capacity. However, the direct application of traditional DER theory and its regularizer reveals structural flaws, leading to unintended constraints in VTG tasks. In response, we develop a simple yet effective Geom-regularizer that enhances the uncertainty learning framework from the ground up. To the best of our knowledge, this marks the first successful attempt of DER in VTG. Our extensive quantitative and qualitative results affirm the effectiveness, robustness, and interpretability of our modules and the uncertainty learning paradigm in VTG tasks. The code will be made available.
Multi-Task Curriculum Graph Contrastive Learning with Clustering Entropy Guidance
Aug 22, 2024Recent advances in unsupervised deep graph clustering have been significantly promoted by contrastive learning. Despite the strides, most graph contrastive learning models face challenges: 1) graph augmentation is used to improve learning diversity, but commonly used random augmentation methods may destroy inherent semantics and cause noise; 2) the fixed positive and negative sample selection strategy is limited to deal with complex real data, thereby impeding the model's capability to capture fine-grained patterns and relationships. To reduce these problems, we propose the Clustering-guided Curriculum Graph contrastive Learning (CCGL) framework. CCGL uses clustering entropy as the guidance of the following graph augmentation and contrastive learning. Specifically, according to the clustering entropy, the intra-class edges and important features are emphasized in augmentation. Then, a multi-task curriculum learning scheme is proposed, which employs the clustering guidance to shift the focus from the discrimination task to the clustering task. In this way, the sample selection strategy of contrastive learning can be adjusted adaptively from early to late stage, which enhances the model's flexibility for complex data structure. Experimental results demonstrate that CCGL has achieved excellent performance compared to state-of-the-art competitors.
CREST: Cross-modal Resonance through Evidential Deep Learning for Enhanced Zero-Shot Learning
Apr 15, 2024



Zero-shot learning (ZSL) enables the recognition of novel classes by leveraging semantic knowledge transfer from known to unknown categories. This knowledge, typically encapsulated in attribute descriptions, aids in identifying class-specific visual features, thus facilitating visual-semantic alignment and improving ZSL performance. However, real-world challenges such as distribution imbalances and attribute co-occurrence among instances often hinder the discernment of local variances in images, a problem exacerbated by the scarcity of fine-grained, region-specific attribute annotations. Moreover, the variability in visual presentation within categories can also skew attribute-category associations. In response, we propose a bidirectional cross-modal ZSL approach CREST. It begins by extracting representations for attribute and visual localization and employs Evidential Deep Learning (EDL) to measure underlying epistemic uncertainty, thereby enhancing the model's resilience against hard negatives. CREST incorporates dual learning pathways, focusing on both visual-category and attribute-category alignments, to ensure robust correlation between latent and observable spaces. Moreover, we introduce an uncertainty-informed cross-modal fusion technique to refine visual-attribute inference. Extensive experiments demonstrate our model's effectiveness and unique explainability across multiple datasets. Our code and data are available at: Comments: Ongoing work; 10 pages, 2 Tables, 9 Figures; Repo is available at https://github.com/JethroJames/CREST.
Deep Contrastive Graph Learning with Clustering-Oriented Guidance
Feb 25, 2024Graph Convolutional Network (GCN) has exhibited remarkable potential in improving graph-based clustering. To handle the general clustering scenario without a prior graph, these models estimate an initial graph beforehand to apply GCN. Throughout the literature, we have witnessed that 1) most models focus on the initial graph while neglecting the original features. Therefore, the discriminability of the learned representation may be corrupted by a low-quality initial graph; 2) the training procedure lacks effective clustering guidance, which may lead to the incorporation of clustering-irrelevant information into the learned graph. To tackle these problems, the Deep Contrastive Graph Learning (DCGL) model is proposed for general data clustering. Specifically, we establish a pseudo-siamese network, which incorporates auto-encoder with GCN to emphasize both the graph structure and the original features. On this basis, feature-level contrastive learning is introduced to enhance the discriminative capacity, and the relationship between samples and centroids is employed as the clustering-oriented guidance. Afterward, a two-branch graph learning mechanism is designed to extract the local and global structural relationships, which are further embedded into a unified graph under the cluster-level contrastive guidance. Experimental results on several benchmark datasets demonstrate the superiority of DCGL against state-of-the-art algorithms.
Traffic Sign Interpretation in Real Road Scene
Nov 28, 2023



Most existing traffic sign-related works are dedicated to detecting and recognizing part of traffic signs individually, which fails to analyze the global semantic logic among signs and may convey inaccurate traffic instruction. Following the above issues, we propose a traffic sign interpretation (TSI) task, which aims to interpret global semantic interrelated traffic signs (e.g.,~driving instruction-related texts, symbols, and guide panels) into a natural language for providing accurate instruction support to autonomous or assistant driving. Meanwhile, we design a multi-task learning architecture for TSI, which is responsible for detecting and recognizing various traffic signs and interpreting them into a natural language like a human. Furthermore, the absence of a public TSI available dataset prompts us to build a traffic sign interpretation dataset, namely TSI-CN. The dataset consists of real road scene images, which are captured from the highway and the urban way in China from a driver's perspective. It contains rich location labels of texts, symbols, and guide panels, and the corresponding natural language description labels. Experiments on TSI-CN demonstrate that the TSI task is achievable and the TSI architecture can interpret traffic signs from scenes successfully even if there is a complex semantic logic among signs. The TSI-CN dataset and the source code of the TSI architecture will be publicly available after the revision process.
One-Shot High-Fidelity Talking-Head Synthesis with Deformable Neural Radiance Field
Apr 11, 2023Talking head generation aims to generate faces that maintain the identity information of the source image and imitate the motion of the driving image. Most pioneering methods rely primarily on 2D representations and thus will inevitably suffer from face distortion when large head rotations are encountered. Recent works instead employ explicit 3D structural representations or implicit neural rendering to improve performance under large pose changes. Nevertheless, the fidelity of identity and expression is not so desirable, especially for novel-view synthesis. In this paper, we propose HiDe-NeRF, which achieves high-fidelity and free-view talking-head synthesis. Drawing on the recently proposed Deformable Neural Radiance Fields, HiDe-NeRF represents the 3D dynamic scene into a canonical appearance field and an implicit deformation field, where the former comprises the canonical source face and the latter models the driving pose and expression. In particular, we improve fidelity from two aspects: (i) to enhance identity expressiveness, we design a generalized appearance module that leverages multi-scale volume features to preserve face shape and details; (ii) to improve expression preciseness, we propose a lightweight deformation module that explicitly decouples the pose and expression to enable precise expression modeling. Extensive experiments demonstrate that our proposed approach can generate better results than previous works. Project page: https://www.waytron.net/hidenerf/
Fully Self-Supervised Depth Estimation from Defocus Clue
Mar 27, 2023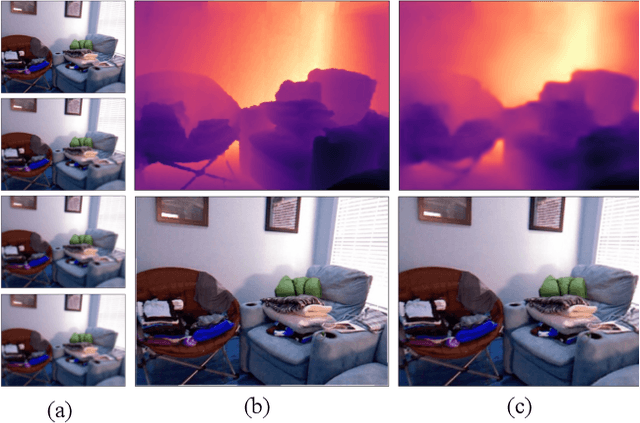
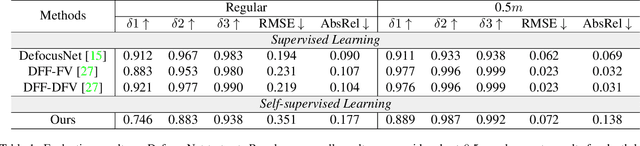
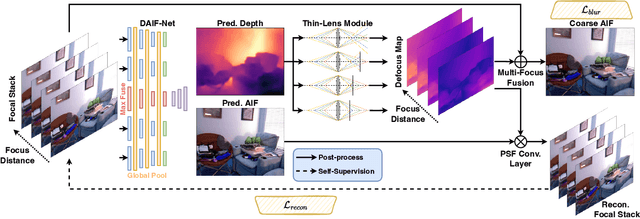
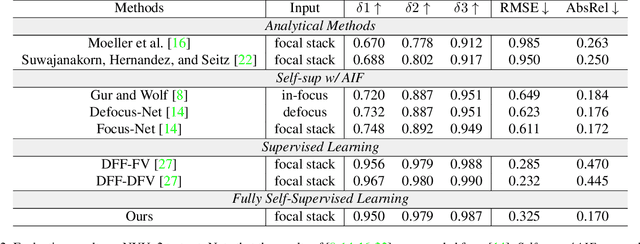
Depth-from-defocus (DFD), modeling the relationship between depth and defocus pattern in images, has demonstrated promising performance in depth estimation. Recently, several self-supervised works try to overcome the difficulties in acquiring accurate depth ground-truth. However, they depend on the all-in-focus (AIF) images, which cannot be captured in real-world scenarios. Such limitation discourages the applications of DFD methods. To tackle this issue, we propose a completely self-supervised framework that estimates depth purely from a sparse focal stack. We show that our framework circumvents the needs for the depth and AIF image ground-truth, and receives superior predictions, thus closing the gap between the theoretical success of DFD works and their applications in the real world. In particular, we propose (i) a more realistic setting for DFD tasks, where no depth or AIF image ground-truth is available; (ii) a novel self-supervision framework that provides reliable predictions of depth and AIF image under the challenging setting. The proposed framework uses a neural model to predict the depth and AIF image, and utilizes an optical model to validate and refine the prediction. We verify our framework on three benchmark datasets with rendered focal stacks and real focal stacks. Qualitative and quantitative evaluations show that our method provides a strong baseline for self-supervised DFD tasks.
Propagate And Calibrate: Real-time Passive Non-line-of-sight Tracking
Mar 27, 2023Non-line-of-sight (NLOS) tracking has drawn increasing attention in recent years, due to its ability to detect object motion out of sight. Most previous works on NLOS tracking rely on active illumination, e.g., laser, and suffer from high cost and elaborate experimental conditions. Besides, these techniques are still far from practical application due to oversimplified settings. In contrast, we propose a purely passive method to track a person walking in an invisible room by only observing a relay wall, which is more in line with real application scenarios, e.g., security. To excavate imperceptible changes in videos of the relay wall, we introduce difference frames as an essential carrier of temporal-local motion messages. In addition, we propose PAC-Net, which consists of alternating propagation and calibration, making it capable of leveraging both dynamic and static messages on a frame-level granularity. To evaluate the proposed method, we build and publish the first dynamic passive NLOS tracking dataset, NLOS-Track, which fills the vacuum of realistic NLOS datasets. NLOS-Track contains thousands of NLOS video clips and corresponding trajectories. Both real-shot and synthetic data are included. Our codes and dataset are available at https://againstentropy.github.io/NLOS-Track/.