 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise-Aware Generative Microscopic Traffic Simulation
Aug 10, 2025Accurately modeling individual vehicle behavior in microscopic traffic simulation remains a key challenge in intelligent transportation systems, as it requires vehicles to realistically generate and respond to complex traffic phenomena such as phantom traffic jams. While traditional human driver simulation models offer computational tractability, they do so by abstracting away the very complexity that defines human driving. On the other hand, recent advances in infrastructure-mounted camera-based roadway sensing have enabled the extraction of vehicle trajectory data, presenting an opportunity to shift toward generative, agent-based models. Yet, a major bottleneck remains: most existing datasets are either overly sanitized or lack standardization, failing to reflect the noisy, imperfect nature of real-world sensing. Unlike data from vehicle-mounted sensors-which can mitigate sensing artifacts like occlusion through overlapping fields of view and sensor fusion-infrastructure-based sensors surface a messier, more practical view of challenges that traffic engineers encounter. To this end, we present the I-24 MOTION Scenario Dataset (I24-MSD)-a standardized, curated dataset designed to preserve a realistic level of sensor imperfection, embracing these errors as part of the learning problem rather than an obstacle to overcome purely from preprocessing. Drawing from noise-aware learning strategies in computer vision, we further adapt existing generative models in the autonomous driving community for I24-MSD with noise-aware loss functions. Our results show that such models not only outperform traditional baselines in realism but also benefit from explicitly engaging with, rather than suppressing, data imperfection. We view I24-MSD as a stepping stone toward a new generation of microscopic traffic simulation that embraces the real-world challenges and is better aligned with practical needs.
Wolf: Captioning Everything with a World Summarization Framework
Jul 26, 2024



We propose Wolf, a WOrLd summarization Framework for accurate video captioning. Wolf is an automated captioning framework that adopts a mixture-of-experts approach, leveraging complementary strengths of Vision Language Models (VLMs). By utilizing both image and video models, our framework captures different levels of information and summarizes them efficiently. Our approach can be applied to enhance video understanding, auto-labeling, and captioning. To evaluate caption quality, we introduce CapScore, an LLM-based metric to assess the similarity and quality of generated captions compared to the ground truth captions. We further build four human-annotated datasets in three domains: autonomous driving, general scenes, and robotics, to facilitate comprehensive comparisons. We show that Wolf achieves superior captioning performance compared to state-of-the-art approaches from the research community (VILA1.5, CogAgent) and commercial solutions (Gemini-Pro-1.5, GPT-4V). For instance, in comparison with GPT-4V, Wolf improves CapScore both quality-wise by 55.6% and similarity-wise by 77.4% on challenging driving videos. Finally, we establish a benchmark for video captioning and introduce a leaderboard, aiming to accelerate advancements in video understanding, captioning, and data alignment. Leaderboard: https://wolfv0.github.io/leaderboard.html.
Trajeglish: Learning the Language of Driving Scenarios
Dec 07, 2023



A longstanding challenge for self-driving development is simulating dynamic driving scenarios seeded from recorded driving logs. In pursuit of this functionality, we apply tools from discrete sequence modeling to model how vehicles, pedestrians and cyclists interact in driving scenarios. Using a simple data-driven tokenization scheme, we discretize trajectories to centimeter-level resolution using a small vocabulary. We then model the multi-agent sequence of motion tokens with a GPT-like encoder-decoder that is autoregressive in time and takes into account intra-timestep interaction between agents. Scenarios sampled from our model exhibit state-of-the-art realism; our model tops the Waymo Sim Agents Benchmark, surpassing prior work along the realism meta metric by 3.3% and along the interaction metric by 9.9%. We ablate our modeling choices in full autonomy and partial autonomy settings, and show that the representations learned by our model can quickly be adapted to improve performance on nuScenes. We additionally evaluate the scalability of our model with respect to parameter count and dataset size, and use density estimates from our model to quantify the saliency of context length and intra-timestep interaction for the traffic modeling task.
Towards Viewpoint Robustness in Bird's Eye View Segmentation
Sep 11, 2023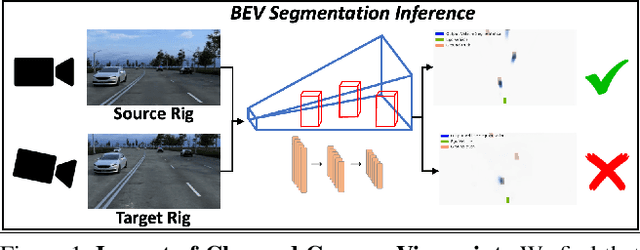


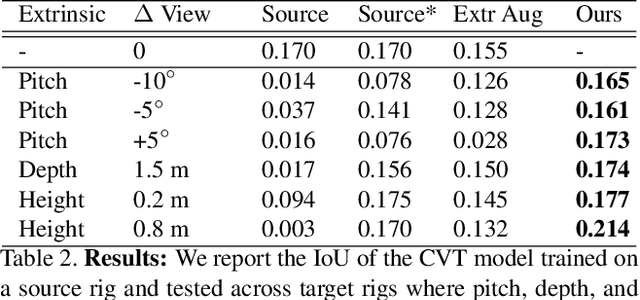
Autonomous vehicles (AV) require that neural networks used for perception be robust to different viewpoints if they are to be deployed across many types of vehicles without the repeated cost of data collection and labeling for each. AV companies typically focus on collecting data from diverse scenarios and locations, but not camera rig configurations, due to cost. As a result, only a small number of rig variations exist across most fleets. In this paper, we study how AV perception models are affected by changes in camera viewpoint and propose a way to scale them across vehicle types without repeated data collection and labeling. Using bird's eye view (BEV) segmentation as a motivating task, we find through extensive experiments that existing perception models are surprisingly sensitive to changes in camera viewpoint. When trained with data from one camera rig, small changes to pitch, yaw, depth, or height of the camera at inference time lead to large drops in performance. We introduce a technique for novel view synthesis and use it to transform collected data to the viewpoint of target rigs, allowing us to train BEV segmentation models for diverse target rigs without any additional data collection or labeling cost. To analyze the impact of viewpoint changes, we leverage synthetic data to mitigate other gaps (content, ISP, etc). Our approach is then trained on real data and evaluated on synthetic data, enabling evaluation on diverse target rigs. We release all data for use in future work. Our method is able to recover an average of 14.7% of the IoU that is otherwise lost when deploying to new rigs.
How Much More Data Do I Need? Estimating Requirements for Downstream Tasks
Jul 13, 2022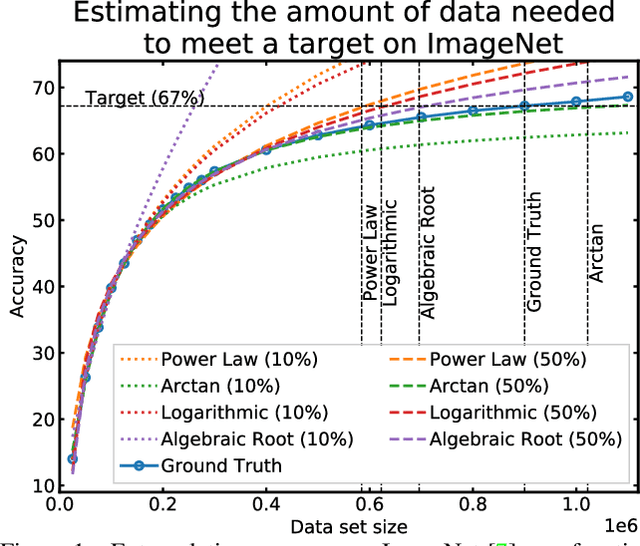
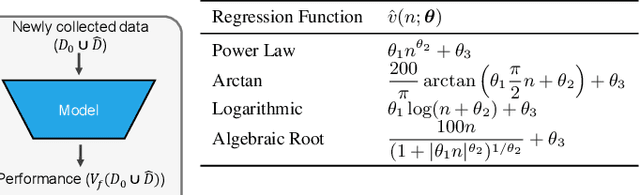
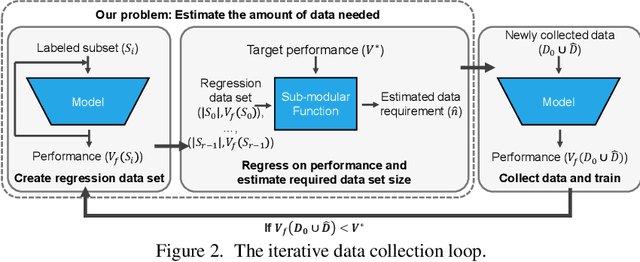
Given a small training data set and a learning algorithm, how much more data is necessary to reach a target validation or test performance? This question is of critical importance in applications such as autonomous driving or medical imaging where collecting data is expensive and time-consuming. Overestimating or underestimating data requirements incurs substantial costs that could be avoided with an adequate budget. Prior work on neural scaling laws suggest that the power-law function can fit the validation performance curve and extrapolate it to larger data set sizes. We find that this does not immediately translate to the more difficult downstream task of estimating the required data set size to meet a target performance. In this work, we consider a broad class of computer vision tasks and systematically investigate a family of functions that generalize the power-law function to allow for better estimation of data requirements. Finally, we show that incorporating a tuned correction factor and collecting over multiple rounds significantly improves the performance of the data estimators. Using our guidelines, practitioners can accurately estimate data requirements of machine learning systems to gain savings in both development time and data acquisition costs.
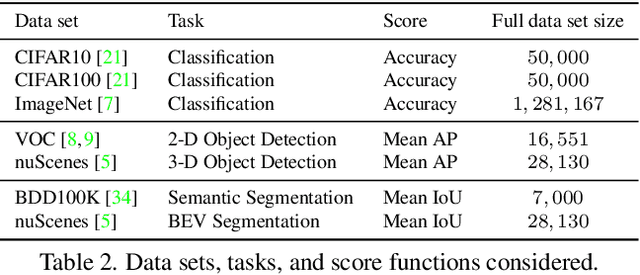
M$^2$BEV: Multi-Camera Joint 3D Detection and Segmentation with Unified Birds-Eye View Representation
Apr 19, 2022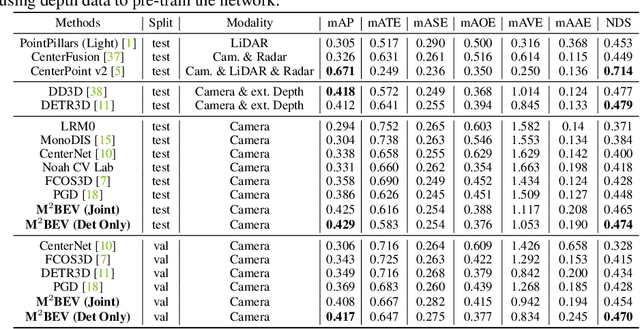
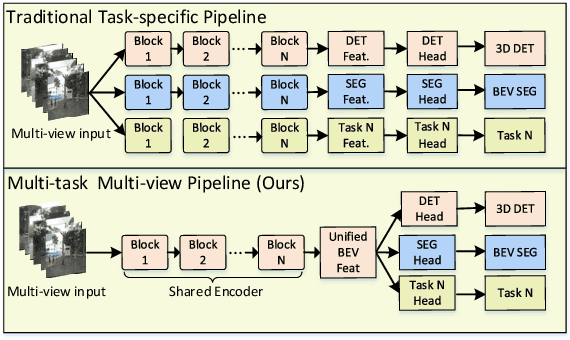
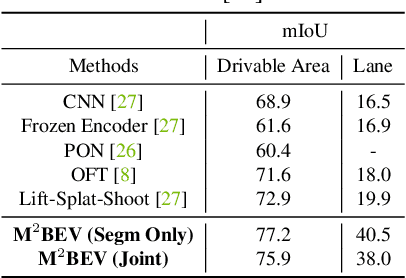
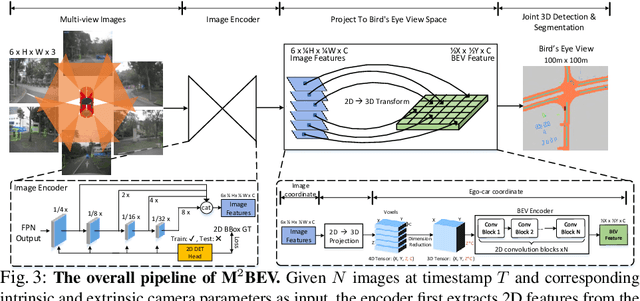
In this paper, we propose M$^2$BEV, a unified framework that jointly performs 3D object detection and map segmentation in the Birds Eye View~(BEV) space with multi-camera image inputs. Unlike the majority of previous works which separately process detection and segmentation, M$^2$BEV infers both tasks with a unified model and improves efficiency. M$^2$BEV efficiently transforms multi-view 2D image features into the 3D BEV feature in ego-car coordinates. Such BEV representation is important as it enables different tasks to share a single encoder. Our framework further contains four important designs that benefit both accuracy and efficiency: (1) An efficient BEV encoder design that reduces the spatial dimension of a voxel feature map. (2) A dynamic box assignment strategy that uses learning-to-match to assign ground-truth 3D boxes with anchors. (3) A BEV centerness re-weighting that reinforces with larger weights for more distant predictions, and (4) Large-scale 2D detection pre-training and auxiliary supervision. We show that these designs significantly benefit the ill-posed camera-based 3D perception tasks where depth information is missing. M$^2$BEV is memory efficient, allowing significantly higher resolution images as input, with faster inference speed. Experiments on nuScenes show that M$^2$BEV achieves state-of-the-art results in both 3D object detection and BEV segmentation, with the best single model achieving 42.5 mAP and 57.0 mIoU in these two tasks, respectively.
Generating Useful Accident-Prone Driving Scenarios via a Learned Traffic Prior
Dec 09, 2021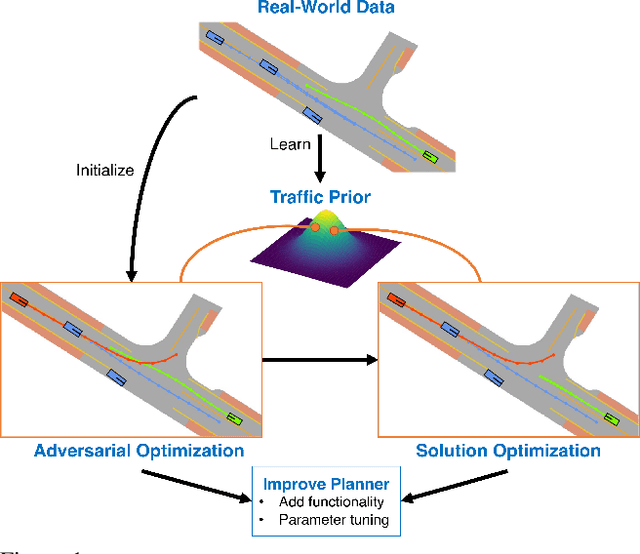

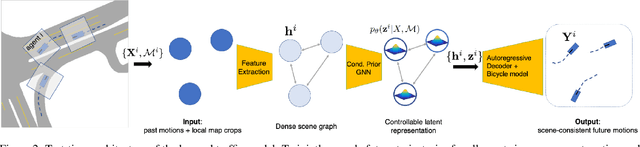

Evaluating and improving planning for autonomous vehicles requires scalable generation of long-tail traffic scenarios. To be useful, these scenarios must be realistic and challenging, but not impossible to drive through safely. In this work, we introduce STRIVE, a method to automatically generate challenging scenarios that cause a given planner to produce undesirable behavior, like collisions. To maintain scenario plausibility, the key idea is to leverage a learned model of traffic motion in the form of a graph-based conditional VAE. Scenario generation is formulated as an optimization in the latent space of this traffic model, effected by perturbing an initial real-world scene to produce trajectories that collide with a given planner. A subsequent optimization is used to find a "solution" to the scenario, ensuring it is useful to improve the given planner. Further analysis clusters generated scenarios based on collision type. We attack two planners and show that STRIVE successfully generates realistic, challenging scenarios in both cases. We additionally "close the loop" and use these scenarios to optimize hyperparameters of a rule-based planner.
Towards Optimal Strategies for Training Self-Driving Perception Models in Simulation
Nov 15, 2021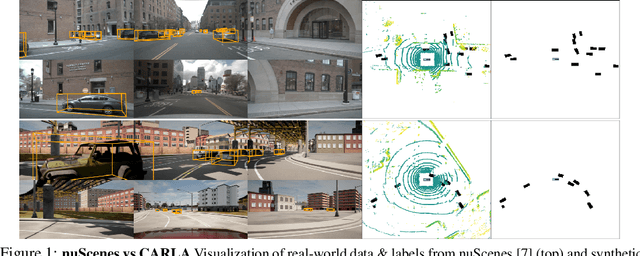
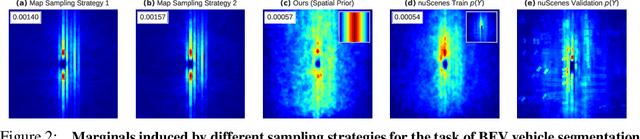
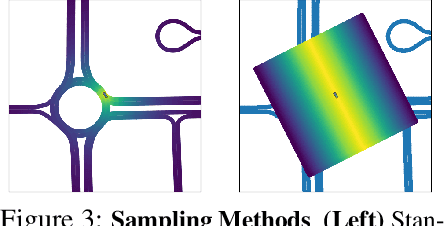
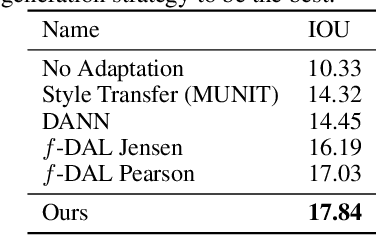
Autonomous driving relies on a huge volume of real-world data to be labeled to high precision. Alternative solutions seek to exploit driving simulators that can generate large amounts of labeled data with a plethora of content variations. However, the domain gap between the synthetic and real data remains, raising the following important question: What are the best ways to utilize a self-driving simulator for perception tasks? In this work, we build on top of recent advances in domain-adaptation theory, and from this perspective, propose ways to minimize the reality gap. We primarily focus on the use of labels in the synthetic domain alone. Our approach introduces both a principled way to learn neural-invariant representations and a theoretically inspired view on how to sample the data from the simulator. Our method is easy to implement in practice as it is agnostic of the network architecture and the choice of the simulator. We showcase our approach on the bird's-eye-view vehicle segmentation task with multi-sensor data (cameras, lidar) using an open-source simulator (CARLA), and evaluate the entire framework on a real-world dataset (nuScenes). Last but not least, we show what types of variations (e.g. weather conditions, number of assets, map design, and color diversity) matter to perception networks when trained with driving simulators, and which ones can be compensated for with our domain adaptation technique.
Learning Indoor Inverse Rendering with 3D Spatially-Varying Lighting
Sep 13, 2021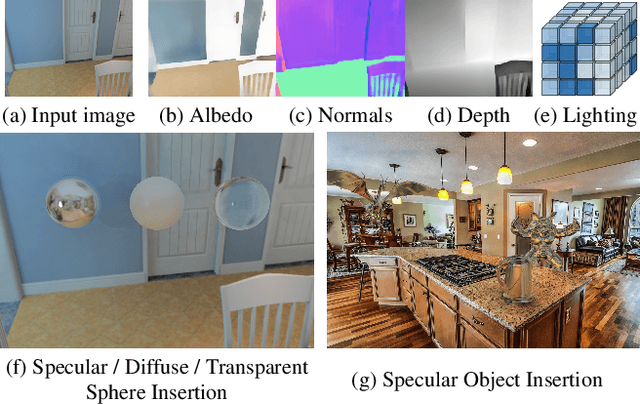

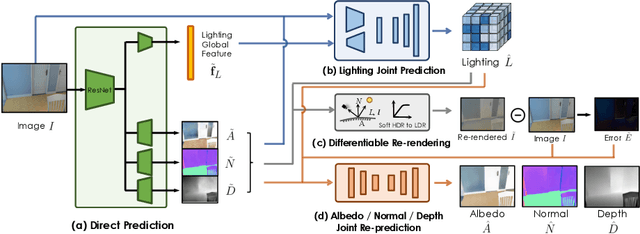
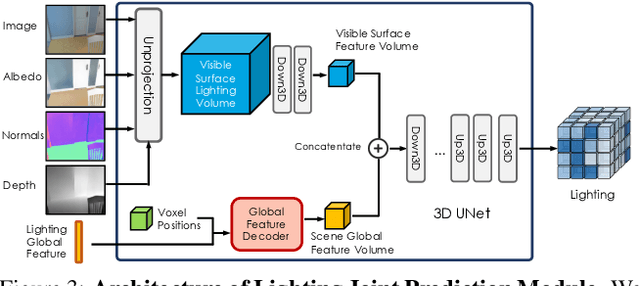
In this work, we address the problem of jointly estimating albedo, normals, depth and 3D spatially-varying lighting from a single image. Most existing methods formulate the task as image-to-image translation, ignoring the 3D properties of the scene. However, indoor scenes contain complex 3D light transport where a 2D representation is insufficient. In this paper, we propose a unified, learning-based inverse rendering framework that formulates 3D spatially-varying lighting. Inspired by classic volume rendering techniques, we propose a novel Volumetric Spherical Gaussian representation for lighting, which parameterizes the exitant radiance of the 3D scene surfaces on a voxel grid. We design a physics based differentiable renderer that utilizes our 3D lighting representation, and formulates the energy-conserving image formation process that enables joint training of all intrinsic properties with the re-rendering constraint. Our model ensures physically correct predictions and avoids the need for ground-truth HDR lighting which is not easily accessible. Experiments show that our method outperforms prior works both quantitatively and qualitatively, and is capable of producing photorealistic results for AR applications such as virtual object insertion even for highly specular objects.
DriveGAN: Towards a Controllable High-Quality Neural Simulation
Apr 30, 2021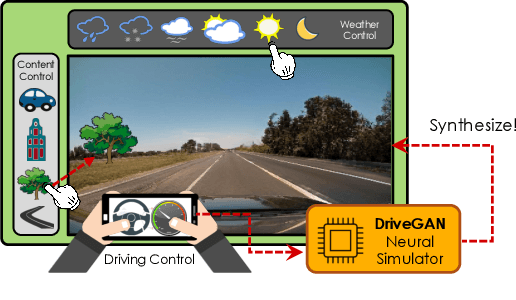
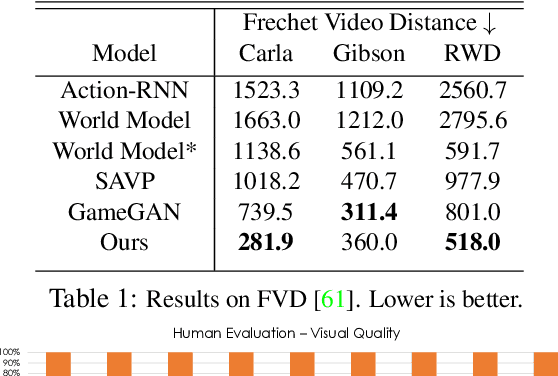
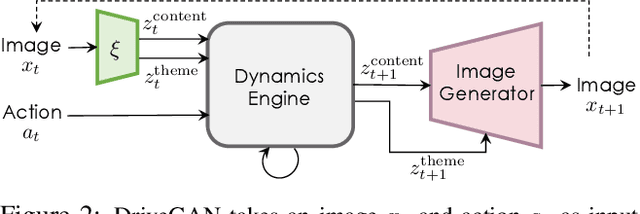
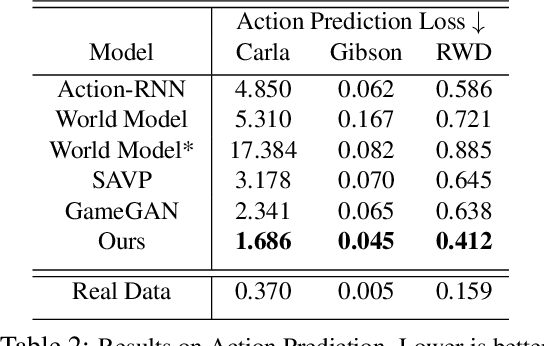
Realistic simulators are critical for training and verifying robotics systems. While most of the contemporary simulators are hand-crafted, a scaleable way to build simulators is to use machine learning to learn how the environment behaves in response to an action, directly from data. In this work, we aim to learn to simulate a dynamic environment directly in pixel-space, by watching unannotated sequences of frames and their associated action pairs. We introduce a novel high-quality neural simulator referred to as DriveGAN that achieves controllability by disentangling different components without supervision. In addition to steering controls, it also includes controls for sampling features of a scene, such as the weather as well as the location of non-player objects. Since DriveGAN is a fully differentiable simulator, it further allows for re-simulation of a given video sequence, offering an agent to drive through a recorded scene again, possibly taking different actions. We train DriveGAN on multiple datasets, including 160 hours of real-world driving data. We showcase that our approach greatly surpasses the performance of previous data-driven simulators, and allows for new features not explored before.