 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSD-Score: Multi-Scale Distributional Scoring for Reference-Free Image Caption Evaluation
May 07, 2026Evaluating image captions without references remains challenging because global embedding similarity often misses fine-grained mismatches such as hallucinated objects, missing attributes, or incorrect relations. We propose MSD-Score, a reference-free metric that models image patch and text token embeddings as von Mises-Fisher mixtures on the unit hypersphere. Instead of treating each modality as a single point, MSD-Score formulates image-text matching as a multi-scale distributional scoring problem. Semantic discrepancies are quantified via a weighted bi-directional KL divergence and combined with global similarity in a multi-scale framework for both single- and multi-candidate evaluations. Extensive experiments show that MSD-Score achieves state-of-the-art correlation with human judgments among reference-free metrics. Beyond accuracy, its probabilistic formulation yields transparent and decomposable diagnostics of local grounding errors, providing a deterministic complementary signal to holistic similarity metrics and judge-based evaluators.
Rethinking Generative Recommender Tokenizer: Recsys-Native Encoding and Semantic Quantization Beyond LLMs
Feb 02, 2026Semantic ID (SID)-based recommendation is a promising paradigm for scaling sequential recommender systems, but existing methods largely follow a semantic-centric pipeline: item embeddings are learned from foundation models and discretized using generic quantization schemes. This design is misaligned with generative recommendation objectives: semantic embeddings are weakly coupled with collaborative prediction, and generic quantization is inefficient at reducing sequential uncertainty for autoregressive modeling. To address these, we propose ReSID, a recommendation-native, principled SID framework that rethinks representation learning and quantization from the perspective of information preservation and sequential predictability, without relying on LLMs. ReSID consists of two components: (i) Field-Aware Masked Auto-Encoding (FAMAE), which learns predictive-sufficient item representations from structured features, and (ii) Globally Aligned Orthogonal Quantization (GAOQ), which produces compact and predictable SID sequences by jointly reducing semantic ambiguity and prefix-conditional uncertainty. Theoretical analysis and extensive experiments across ten datasets show the effectiveness of ReSID. ReSID consistently outperforms strong sequential and SID-based generative baselines by an average of over 10%, while reducing tokenization cost by up to 122x. Code is available at https://github.com/FuCongResearchSquad/ReSID.
Spatially Generalizable Mobile Manipulation via Adaptive Experience Selection and Dynamic Imagination
Jan 21, 2026Mobile Manipulation (MM) involves long-horizon decision-making over multi-stage compositions of heterogeneous skills, such as navigation and picking up objects. Despite recent progress, existing MM methods still face two key limitations: (i) low sample efficiency, due to ineffective use of redundant data generated during long-term MM interactions; and (ii) poor spatial generalization, as policies trained on specific tasks struggle to transfer to new spatial layouts without additional training. In this paper, we address these challenges through Adaptive Experience Selection (AES) and model-based dynamic imagination. In particular, AES makes MM agents pay more attention to critical experience fragments in long trajectories that affect task success, improving skill chain learning and mitigating skill forgetting. Based on AES, a Recurrent State-Space Model (RSSM) is introduced for Model-Predictive Forward Planning (MPFP) by capturing the coupled dynamics between the mobile base and the manipulator and imagining the dynamics of future manipulations. RSSM-based MPFP can reinforce MM skill learning on the current task while enabling effective generalization to new spatial layouts. Comparative studies across different experimental configurations demonstrate that our method significantly outperforms existing MM policies. Real-world experiments further validate the feasibility and practicality of our method.
Embed Progressive Implicit Preference in Unified Space for Deep Collaborative Filtering
May 28, 2025Embedding-based collaborative filtering, often coupled with nearest neighbor search, is widely deployed in large-scale recommender systems for personalized content selection. Modern systems leverage multiple implicit feedback signals (e.g., clicks, add to cart, purchases) to model user preferences comprehensively. However, prevailing approaches adopt a feedback-wise modeling paradigm, which (1) fails to capture the structured progression of user engagement entailed among different feedback and (2) embeds feedback-specific information into disjoint spaces, making representations incommensurable, increasing system complexity, and leading to suboptimal retrieval performance. A promising alternative is Ordinal Logistic Regression (OLR), which explicitly models discrete ordered relations. However, existing OLR-based recommendation models mainly focus on explicit feedback (e.g., movie ratings) and struggle with implicit, correlated feedback, where ordering is vague and non-linear. Moreover, standard OLR lacks flexibility in handling feedback-dependent covariates, resulting in suboptimal performance in real-world systems. To address these limitations, we propose Generalized Neural Ordinal Logistic Regression (GNOLR), which encodes multiple feature-feedback dependencies into a unified, structured embedding space and enforces feedback-specific dependency learning through a nested optimization framework. Thus, GNOLR enhances predictive accuracy, captures the progression of user engagement, and simplifies the retrieval process. We establish a theoretical comparison with existing paradigms, demonstrating how GNOLR avoids disjoint spaces while maintaining effectiveness. Extensive experiments on ten real-world datasets show that GNOLR significantly outperforms state-of-the-art methods in efficiency and adaptability.
Retrieval Augmented Decision-Making: A Requirements-Driven, Multi-Criteria Framework for Structured Decision Support
May 24, 2025Various industries have produced a large number of documents such as industrial plans, technical guidelines, and regulations that are structurally complex and content-wise fragmented. This poses significant challenges for experts and decision-makers in terms of retrieval and understanding. Although existing LLM-based Retrieval-Augmented Generation methods can provide context-related suggestions, they lack quantitative weighting and traceable reasoning paths, making it difficult to offer multi-level and transparent decision support. To address this issue, this paper proposes the RAD method, which integrates Multi-Criteria Decision Making with the semantic understanding capabilities of LLMs. The method automatically extracts key criteria from industry documents, builds a weighted hierarchical decision model, and generates structured reports under model guidance. The RAD framework introduces explicit weight assignment and reasoning chains in decision generation to ensure accuracy, completeness, and traceability. Experiments show that in various decision-making tasks, the decision reports generated by RAD significantly outperform existing methods in terms of detail, rationality, and structure, demonstrating its application value and potential in complex decision support scenarios.
AKRMap: Adaptive Kernel Regression for Trustworthy Visualization of Cross-Modal Embeddings
May 20, 2025Cross-modal embeddings form the foundation for multi-modal models. However, visualization methods for interpreting cross-modal embeddings have been primarily confined to traditional dimensionality reduction (DR) techniques like PCA and t-SNE. These DR methods primarily focus on feature distributions within a single modality, whilst failing to incorporate metrics (e.g., CLIPScore) across multiple modalities.This paper introduces AKRMap, a new DR technique designed to visualize cross-modal embeddings metric with enhanced accuracy by learning kernel regression of the metric landscape in the projection space. Specifically, AKRMap constructs a supervised projection network guided by a post-projection kernel regression loss, and employs adaptive generalized kernels that can be jointly optimized with the projection. This approach enables AKRMap to efficiently generate visualizations that capture complex metric distributions, while also supporting interactive features such as zoom and overlay for deeper exploration. Quantitative experiments demonstrate that AKRMap outperforms existing DR methods in generating more accurate and trustworthy visualizations. We further showcase the effectiveness of AKRMap in visualizing and comparing cross-modal embeddings for text-to-image models. Code and demo are available at https://github.com/yilinye/AKRMap.
FlexPara: Flexible Neural Surface Parameterization
Apr 27, 2025Surface parameterization is a fundamental geometry processing task, laying the foundations for the visual presentation of 3D assets and numerous downstream shape analysis scenarios. Conventional parameterization approaches demand high-quality mesh triangulation and are restricted to certain simple topologies unless additional surface cutting and decomposition are provided. In practice, the optimal configurations (e.g., type of parameterization domains, distribution of cutting seams, number of mapping charts) may vary drastically with different surface structures and task characteristics, thus requiring more flexible and controllable processing pipelines. To this end, this paper introduces FlexPara, an unsupervised neural optimization framework to achieve both global and multi-chart surface parameterizations by establishing point-wise mappings between 3D surface points and adaptively-deformed 2D UV coordinates. We ingeniously design and combine a series of geometrically-interpretable sub-networks, with specific functionalities of cutting, deforming, unwrapping, and wrapping, to construct a bi-directional cycle mapping framework for global parameterization without the need for manually specified cutting seams. Furthermore, we construct a multi-chart parameterization framework with adaptively-learned chart assignment. Extensive experiments demonstrate the universality, superiority, and inspiring potential of our neural surface parameterization paradigm. The code will be publicly available at https://github.com/AidenZhao/FlexPara
SketchFlex: Facilitating Spatial-Semantic Coherence in Text-to-Image Generation with Region-Based Sketches
Feb 11, 2025Text-to-image models can generate visually appealing images from text descriptions. Efforts have been devoted to improving model controls with prompt tuning and spatial conditioning. However, our formative study highlights the challenges for non-expert users in crafting appropriate prompts and specifying fine-grained spatial conditions (e.g., depth or canny references) to generate semantically cohesive images, especially when multiple objects are involved. In response, we introduce SketchFlex, an interactive system designed to improve the flexibility of spatially conditioned image generation using rough region sketches. The system automatically infers user prompts with rational descriptions within a semantic space enriched by crowd-sourced object attributes and relationships. Additionally, SketchFlex refines users' rough sketches into canny-based shape anchors, ensuring the generation quality and alignment of user intentions. Experimental results demonstrate that SketchFlex achieves more cohesive image generations than end-to-end models, meanwhile significantly reducing cognitive load and better matching user intentions compared to region-based generation baseline.
LiDAR-RT: Gaussian-based Ray Tracing for Dynamic LiDAR Re-simulation
Dec 19, 2024



This paper targets the challenge of real-time LiDAR re-simulation in dynamic driving scenarios. Recent approaches utilize neural radiance fields combined with the physical modeling of LiDAR sensors to achieve high-fidelity re-simulation results. Unfortunately, these methods face limitations due to high computational demands in large-scale scenes and cannot perform real-time LiDAR rendering. To overcome these constraints, we propose LiDAR-RT, a novel framework that supports real-time, physically accurate LiDAR re-simulation for driving scenes. Our primary contribution is the development of an efficient and effective rendering pipeline, which integrates Gaussian primitives and hardware-accelerated ray tracing technology. Specifically, we model the physical properties of LiDAR sensors using Gaussian primitives with learnable parameters and incorporate scene graphs to handle scene dynamics. Building upon this scene representation, our framework first constructs a bounding volume hierarchy (BVH), then casts rays for each pixel and generates novel LiDAR views through a differentiable rendering algorithm. Importantly, our framework supports realistic rendering with flexible scene editing operations and various sensor configurations. Extensive experiments across multiple public benchmarks demonstrate that our method outperforms state-of-the-art methods in terms of rendering quality and efficiency. Our project page is at https://zju3dv.github.io/lidar-rt.
Diagnosing Ensemble Few-Shot Classifiers
Jun 09, 2022
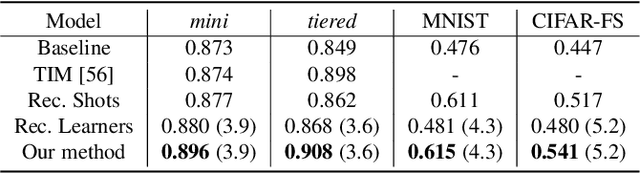


The base learners and labeled samples (shots) in an ensemble few-shot classifier greatly affect the model performance. When the performance is not satisfactory, it is usually difficult to understand the underlying causes and make improvements. To tackle this issue, we propose a visual analysis method, FSLDiagnotor. Given a set of base learners and a collection of samples with a few shots, we consider two problems: 1) finding a subset of base learners that well predict the sample collections; and 2) replacing the low-quality shots with more representative ones to adequately represent the sample collections. We formulate both problems as sparse subset selection and develop two selection algorithms to recommend appropriate learners and shots, respectively. A matrix visualization and a scatterplot are combined to explain the recommended learners and shots in context and facilitate users in adjusting them. Based on the adjustment, the algorithm updates the recommendation results for another round of improvement. Two case studies are conducted to demonstrate that FSLDiagnotor helps build a few-shot classifier efficiently and increases the accuracy by 12% and 21%, respectively.