 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTEP3-VL-10B Technical Report
Jan 15, 2026We present STEP3-VL-10B, a lightweight open-source foundation model designed to redefine the trade-off between compact efficiency and frontier-level multimodal intelligence. STEP3-VL-10B is realized through two strategic shifts: first, a unified, fully unfrozen pre-training strategy on 1.2T multimodal tokens that integrates a language-aligned Perception Encoder with a Qwen3-8B decoder to establish intrinsic vision-language synergy; and second, a scaled post-training pipeline featuring over 1k iterations of reinforcement learning. Crucially, we implement Parallel Coordinated Reasoning (PaCoRe) to scale test-time compute, allocating resources to scalable perceptual reasoning that explores and synthesizes diverse visual hypotheses. Consequently, despite its compact 10B footprint, STEP3-VL-10B rivals or surpasses models 10$\times$-20$\times$ larger (e.g., GLM-4.6V-106B, Qwen3-VL-235B) and top-tier proprietary flagships like Gemini 2.5 Pro and Seed-1.5-VL. Delivering best-in-class performance, it records 92.2% on MMBench and 80.11% on MMMU, while excelling in complex reasoning with 94.43% on AIME2025 and 75.95% on MathVision. We release the full model suite to provide the community with a powerful, efficient, and reproducible baseline.
Decoupled Action Head: Confining Task Knowledge to Conditioning Layers
Nov 15, 2025Behavior Cloning (BC) is a data-driven supervised learning approach that has gained increasing attention with the success of scaling laws in language and vision domains. Among its implementations in robotic manipulation, Diffusion Policy (DP), with its two variants DP-CNN (DP-C) and DP-Transformer (DP-T), is one of the most effective and widely adopted models, demonstrating the advantages of predicting continuous action sequences. However, both DP and other BC methods remain constrained by the scarcity of paired training data, and the internal mechanisms underlying DP's effectiveness remain insufficiently understood, leading to limited generalization and a lack of principled design in model development. In this work, we propose a decoupled training recipe that leverages nearly cost-free kinematics-generated trajectories as observation-free data to pretrain a general action head (action generator). The pretrained action head is then frozen and adapted to novel tasks through feature modulation. Our experiments demonstrate the feasibility of this approach in both in-distribution and out-of-distribution scenarios. As an additional benefit, decoupling improves training efficiency; for instance, DP-C achieves up to a 41% speedup. Furthermore, the confinement of task-specific knowledge to the conditioning components under decoupling, combined with the near-identical performance of DP-C in both normal and decoupled training, indicates that the action generation backbone plays a limited role in robotic manipulation. Motivated by this observation, we introduce DP-MLP, which replaces the 244M-parameter U-Net backbone of DP-C with only 4M parameters of simple MLP blocks, achieving a 83.9% faster training speed under normal training and 89.1% under decoupling.
Behavior-Aware Online Prediction of Obstacle Occupancy using Zonotopes
Oct 23, 2025Predicting the motion of surrounding vehicles is key to safe autonomous driving, especially in unstructured environments without prior information. This paper proposes a novel online method to accurately predict the occupancy sets of surrounding vehicles based solely on motion observations. The approach is divided into two stages: first, an Extended Kalman Filter and a Linear Programming (LP) problem are used to estimate a compact zonotopic set of control actions; then, a reachability analysis propagates this set to predict future occupancy. The effectiveness of the method has been validated through simulations in an urban environment, showing accurate and compact predictions without relying on prior assumptions or prior training data.
Linguistic Neuron Overlap Patterns to Facilitate Cross-lingual Transfer on Low-resource Languages
Aug 23, 2025The current Large Language Models (LLMs) face significant challenges in improving performance on low-resource languages and urgently need data-efficient methods without costly fine-tuning. From the perspective of language-bridge, we propose BridgeX-ICL, a simple yet effective method to improve zero-shot Cross-lingual In-Context Learning (X-ICL) for low-resource languages. Unlike existing works focusing on language-specific neurons, BridgeX-ICL explores whether sharing neurons can improve cross-lingual performance in LLMs or not. We construct neuron probe data from the ground-truth MUSE bilingual dictionaries, and define a subset of language overlap neurons accordingly, to ensure full activation of these anchored neurons. Subsequently, we propose an HSIC-based metric to quantify LLMs' internal linguistic spectrum based on overlap neurons, which guides optimal bridge selection. The experiments conducted on 2 cross-lingual tasks and 15 language pairs from 7 diverse families (covering both high-low and moderate-low pairs) validate the effectiveness of BridgeX-ICL and offer empirical insights into the underlying multilingual mechanisms of LLMs.
MHANet: Multi-scale Hybrid Attention Network for Auditory Attention Detection
May 21, 2025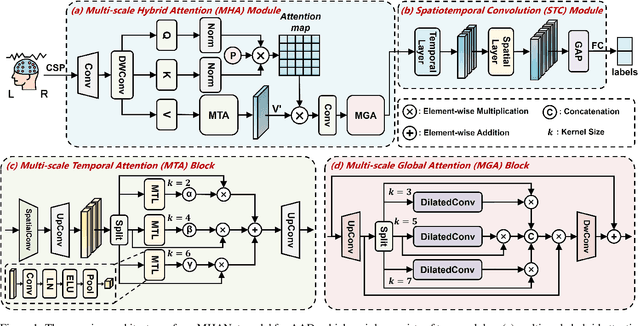
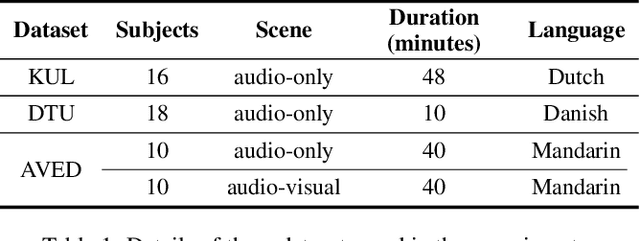
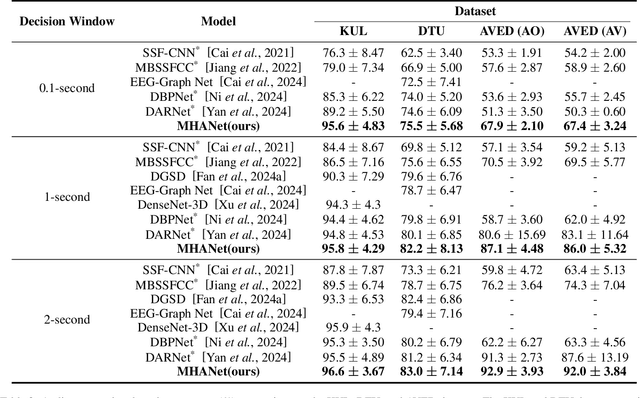
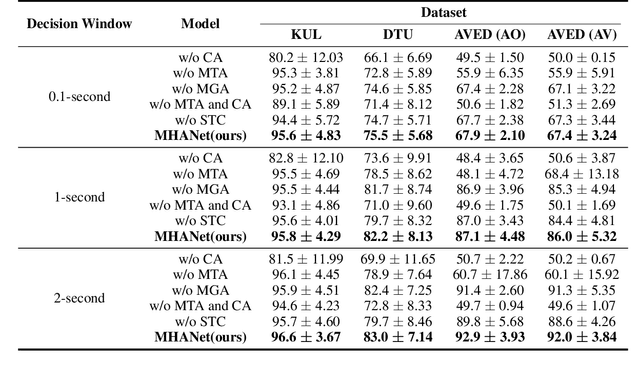
Auditory attention detection (AAD) aims to detect the target speaker in a multi-talker environment from brain signals, such as electroencephalography (EEG), which has made great progress. However, most AAD methods solely utilize attention mechanisms sequentially and overlook valuable multi-scale contextual information within EEG signals, limiting their ability to capture long-short range spatiotemporal dependencies simultaneously. To address these issues, this paper proposes a multi-scale hybrid attention network (MHANet) for AAD, which consists of the multi-scale hybrid attention (MHA) module and the spatiotemporal convolution (STC) module. Specifically, MHA combines channel attention and multi-scale temporal and global attention mechanisms. This effectively extracts multi-scale temporal patterns within EEG signals and captures long-short range spatiotemporal dependencies simultaneously. To further improve the performance of AAD, STC utilizes temporal and spatial convolutions to aggregate expressive spatiotemporal representations. Experimental results show that the proposed MHANet achieves state-of-the-art performance with fewer trainable parameters across three datasets, 3 times lower than that of the most advanced model. Code is available at: https://github.com/fchest/MHANet.
ListenNet: A Lightweight Spatio-Temporal Enhancement Nested Network for Auditory Attention Detection
May 15, 2025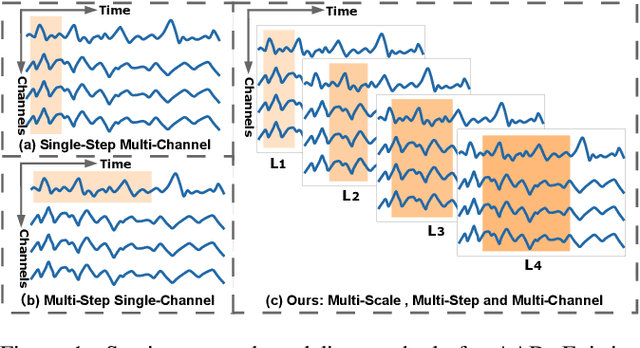
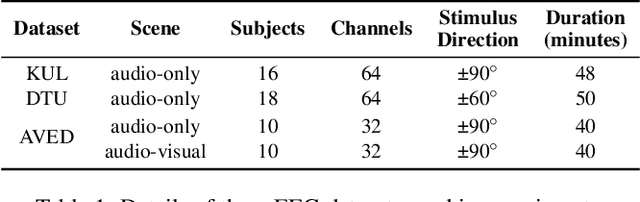
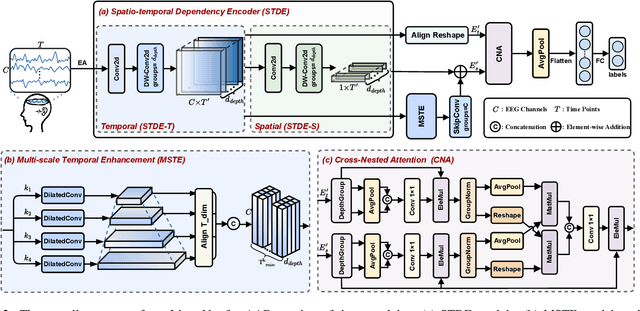
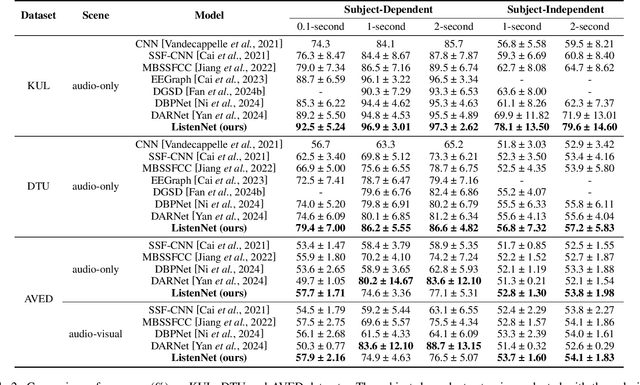
Auditory attention detection (AAD) aims to identify the direction of the attended speaker in multi-speaker environments from brain signals, such as Electroencephalography (EEG) signals. However, existing EEG-based AAD methods overlook the spatio-temporal dependencies of EEG signals, limiting their decoding and generalization abilities. To address these issues, this paper proposes a Lightweight Spatio-Temporal Enhancement Nested Network (ListenNet) for AAD. The ListenNet has three key components: Spatio-temporal Dependency Encoder (STDE), Multi-scale Temporal Enhancement (MSTE), and Cross-Nested Attention (CNA). The STDE reconstructs dependencies between consecutive time windows across channels, improving the robustness of dynamic pattern extraction. The MSTE captures temporal features at multiple scales to represent both fine-grained and long-range temporal patterns. In addition, the CNA integrates hierarchical features more effectively through novel dynamic attention mechanisms to capture deep spatio-temporal correlations. Experimental results on three public datasets demonstrate the superiority of ListenNet over state-of-the-art methods in both subject-dependent and challenging subject-independent settings, while reducing the trainable parameter count by approximately 7 times. Code is available at:https://github.com/fchest/ListenNet.
SparseMeXT Unlocking the Potential of Sparse Representations for HD Map Construction
May 12, 2025Recent advancements in high-definition \emph{HD} map construction have demonstrated the effectiveness of dense representations, which heavily rely on computationally intensive bird's-eye view \emph{BEV} features. While sparse representations offer a more efficient alternative by avoiding dense BEV processing, existing methods often lag behind due to the lack of tailored designs. These limitations have hindered the competitiveness of sparse representations in online HD map construction. In this work, we systematically revisit and enhance sparse representation techniques, identifying key architectural and algorithmic improvements that bridge the gap with--and ultimately surpass--dense approaches. We introduce a dedicated network architecture optimized for sparse map feature extraction, a sparse-dense segmentation auxiliary task to better leverage geometric and semantic cues, and a denoising module guided by physical priors to refine predictions. Through these enhancements, our method achieves state-of-the-art performance on the nuScenes dataset, significantly advancing HD map construction and centerline detection. Specifically, SparseMeXt-Tiny reaches a mean average precision \emph{mAP} of 55.5% at 32 frames per second \emph{fps}, while SparseMeXt-Base attains 65.2% mAP. Scaling the backbone and decoder further, SparseMeXt-Large achieves an mAP of 68.9% at over 20 fps, establishing a new benchmark for sparse representations in HD map construction. These results underscore the untapped potential of sparse methods, challenging the conventional reliance on dense representations and redefining efficiency-performance trade-offs in the field.
Extracting Abstraction Dimensions by Identifying Syntax Pattern from Texts
Apr 26, 2025This paper proposed an approach to automatically discovering subject dimension, action dimension, object dimension and adverbial dimension from texts to efficiently operate texts and support query in natural language. The high quality of trees guarantees that all subjects, actions, objects and adverbials and their subclass relations within texts can be represented. The independency of trees ensures that there is no redundant representation between trees. The expressiveness of trees ensures that the majority of sentences can be accessed from each tree and the rest of sentences can be accessed from at least one tree so that the tree-based search mechanism can support querying in natural language. Experiments show that the average precision, recall and F1-score of the abstraction trees constructed by the subclass relations of subject, action, object and adverbial are all greater than 80%. The application of the proposed approach to supporting query in natural language demonstrates that different types of question patterns for querying subject or object have high coverage of texts, and searching multiple trees on subject, action, object and adverbial according to the question pattern can quickly reduce search space to locate target sentences, which can support precise operation on texts.
Robust Federated Learning in Unreliable Wireless Networks: A Client Selection Approach
Feb 26, 2025Federated learning (FL) has emerged as a promising distributed learning paradigm for training deep neural networks (DNNs) at the wireless edge, but its performance can be severely hindered by unreliable wireless transmission and inherent data heterogeneity among clients. Existing solutions primarily address these challenges by incorporating wireless resource optimization strategies, often focusing on uplink resource allocation across clients under the assumption of homogeneous client-server network standards. However, these approaches overlooked the fact that mobile clients may connect to the server via diverse network standards (e.g., 4G, 5G, Wi-Fi) with customized configurations, limiting the flexibility of server-side modifications and restricting applicability in real-world commercial networks. This paper presents a novel theoretical analysis about how transmission failures in unreliable networks distort the effective label distributions of local samples, causing deviations from the global data distribution and introducing convergence bias in FL. Our analysis reveals that a carefully designed client selection strategy can mitigate biases induced by network unreliability and data heterogeneity. Motivated by this insight, we propose FedCote, a client selection approach that optimizes client selection probabilities without relying on wireless resource scheduling. Experimental results demonstrate the robustness of FedCote in DNN-based classification tasks under unreliable networks with frequent transmission failures.
BSDB-Net: Band-Split Dual-Branch Network with Selective State Spaces Mechanism for Monaural Speech Enhancement
Dec 26, 2024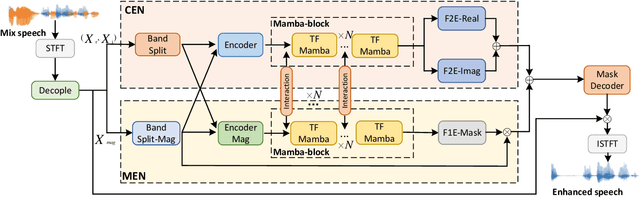
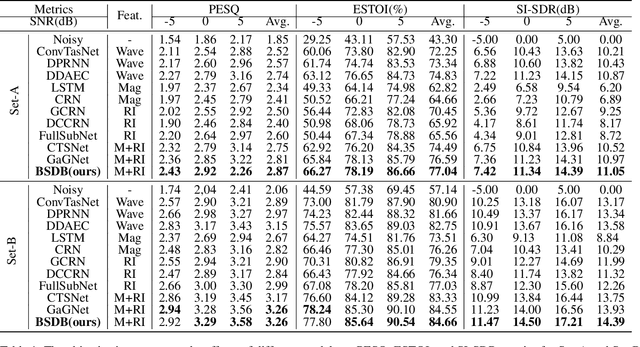
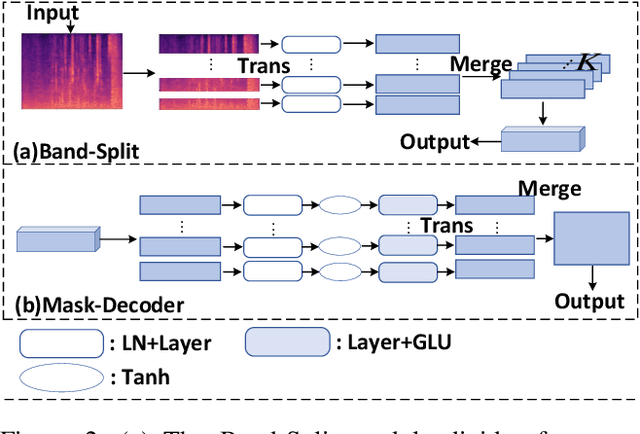
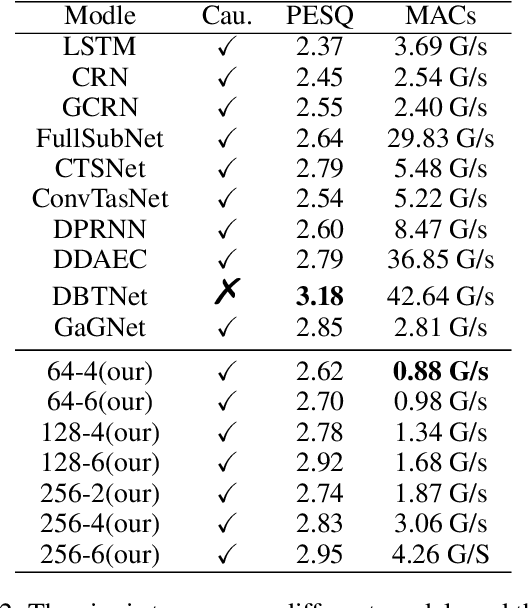
Although the complex spectrum-based speech enhancement(SE) methods have achieved significant performance, coupling amplitude and phase can lead to a compensation effect, where amplitude information is sacrificed to compensate for the phase that is harmful to SE. In addition, to further improve the performance of SE, many modules are stacked onto SE, resulting in increased model complexity that limits the application of SE. To address these problems, we proposed a dual-path network based on compressed frequency using Mamba. First, we extract amplitude and phase information through parallel dual branches. This approach leverages structured complex spectra to implicitly capture phase information and solves the compensation effect by decoupling amplitude and phase, and the network incorporates an interaction module to suppress unnecessary parts and recover missing components from the other branch. Second, to reduce network complexity, the network introduces a band-split strategy to compress the frequency dimension. To further reduce complexity while maintaining good performance, we designed a Mamba-based module that models the time and frequency dimensions under linear complexity. Finally, compared to baselines, our model achieves an average 8.3 times reduction in computational complexity while maintaining superior performance. Furthermore, it achieves a 25 times reduction in complexity compared to transformer-based models.