 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Decision-Making and Planning for Autonomous Forced Merging
Oct 27, 2024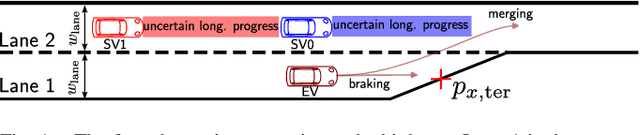
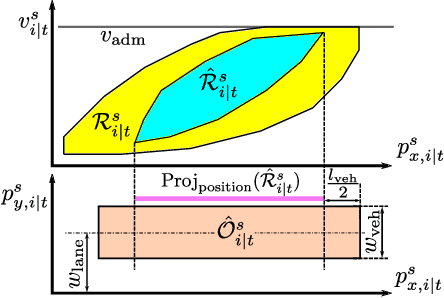
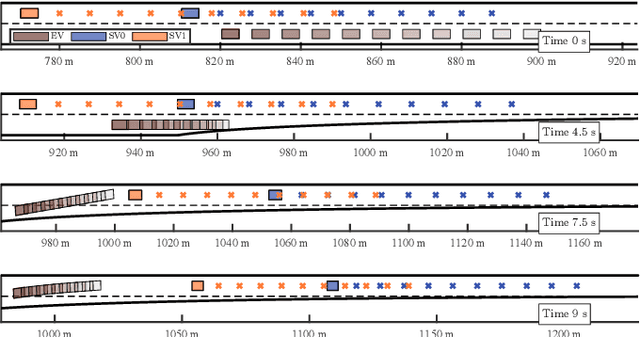
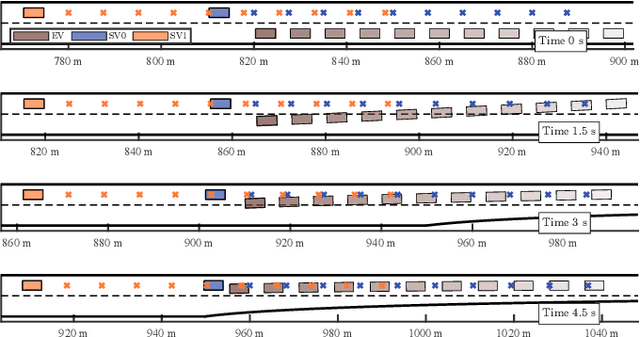
In this paper, we develop an uncertainty-aware decision-making and motion-planning method for an autonomous ego vehicle in forced merging scenarios, considering the motion uncertainty of surrounding vehicles. The method dynamically captures the uncertainty of surrounding vehicles by online estimation of their acceleration bounds, enabling a reactive but rapid understanding of the uncertainty characteristics of the surrounding vehicles. By leveraging these estimated bounds, a non-conservative forward occupancy of surrounding vehicles is predicted over a horizon, which is incorporated in both the decision-making process and the motion-planning strategy, to enhance the resilience and safety of the planned reference trajectory. The method successfully fulfills the tasks in challenging forced merging scenarios, and the properties are illustrated by comparison with several alternative approaches.
A Preprocessing and Evaluation Toolbox for Trajectory Prediction Research on the Drone Datasets
May 01, 2024



The availability of high-quality datasets is crucial for the development of behavior prediction algorithms in autonomous vehicles. This paper highlights the need for standardizing the use of certain datasets for motion forecasting research to simplify comparative analysis and proposes a set of tools and practices to achieve this. Drawing on extensive experience and a comprehensive review of current literature, we summarize our proposals for preprocessing, visualizing, and evaluation in the form of an open-sourced toolbox designed for researchers working on trajectory prediction problems. The clear specification of necessary preprocessing steps and evaluation metrics is intended to alleviate development efforts and facilitate the comparison of results across different studies. The toolbox is available at: https://github.com/westny/dronalize.
Diffusion-Based Environment-Aware Trajectory Prediction
Mar 18, 2024



The ability to predict the future trajectories of traffic participants is crucial for the safe and efficient operation of autonomous vehicles. In this paper, a diffusion-based generative model for multi-agent trajectory prediction is proposed. The model is capable of capturing the complex interactions between traffic participants and the environment, accurately learning the multimodal nature of the data. The effectiveness of the approach is assessed on large-scale datasets of real-world traffic scenarios, showing that our model outperforms several well-established methods in terms of prediction accuracy. By the incorporation of differential motion constraints on the model output, we illustrate that our model is capable of generating a diverse set of realistic future trajectories. Through the use of an interaction-aware guidance signal, we further demonstrate that the model can be adapted to predict the behavior of less cooperative agents, emphasizing its practical applicability under uncertain traffic conditions.
Robust Predictive Motion Planning by Learning Obstacle Uncertainty
Mar 10, 2024



Safe motion planning for robotic systems in dynamic environments is nontrivial in the presence of uncertain obstacles, where estimation of obstacle uncertainties is crucial in predicting future motions of dynamic obstacles. The worst-case characterization gives a conservative uncertainty prediction and may result in infeasible motion planning for the ego robotic system. In this paper, an efficient, robust, and safe motion-planing algorithm is developed by learning the obstacle uncertainties online. More specifically, the unknown yet intended control set of obstacles is efficiently computed by solving a linear programming problem. The learned control set is used to compute forward reachable sets of obstacles that are less conservative than the worst-case prediction. Based on the forward prediction, a robust model predictive controller is designed to compute a safe reference trajectory for the ego robotic system that remains outside the reachable sets of obstacles over the prediction horizon. The method is applied to a car-like mobile robot in both simulations and hardware experiments to demonstrate its effectiveness.
Evaluation of Differentially Constrained Motion Models for Graph-Based Trajectory Prediction
Apr 24, 2023



Given their flexibility and encouraging performance, deep-learning models are becoming standard for motion prediction in autonomous driving. However, with great flexibility comes a lack of interpretability and possible violations of physical constraints. Accompanying these data-driven methods with differentially-constrained motion models to provide physically feasible trajectories is a promising future direction. The foundation for this work is a previously introduced graph-neural-network-based model, MTP-GO. The neural network learns to compute the inputs to an underlying motion model to provide physically feasible trajectories. This research investigates the performance of various motion models in combination with numerical solvers for the prediction task. The study shows that simpler models, such as low-order integrator models, are preferred over more complex, e.g., kinematic models, to achieve accurate predictions. Further, the numerical solver can have a substantial impact on performance, advising against commonly used first-order methods like Euler forward. Instead, a second-order method like Heun's can greatly improve predictions.
MTP-GO: Graph-Based Probabilistic Multi-Agent Trajectory Prediction with Neural ODEs
Feb 09, 2023



Enabling resilient autonomous motion planning requires robust predictions of surrounding road users' future behavior. In response to this need and the associated challenges, we introduce our model, titled MTP-GO. The model encodes the scene using temporal graph neural networks to produce the inputs to an underlying motion model. The motion model is implemented using neural ordinary differential equations where the state-transition functions are learned with the rest of the model. Multi-modal probabilistic predictions are provided by combining the concept of mixture density networks and Kalman filtering. The results illustrate the predictive capabilities of the proposed model across various data sets, outperforming several state-of-the-art methods on a number of metrics.
Vehicle Behavior Prediction and Generalization Using Imbalanced Learning Techniques
Sep 22, 2021



The use of learning-based methods for vehicle behavior prediction is a promising research topic. However, many publicly available data sets suffer from class distribution skews which limits learning performance if not addressed. This paper proposes an interaction-aware prediction model consisting of an LSTM autoencoder and SVM classifier. Additionally, an imbalanced learning technique, the multiclass balancing ensemble is proposed. Evaluations show that the method enhances model performance, resulting in improved classification accuracy. Good generalization properties of learned models are important and therefore a generalization study is done where models are evaluated on unseen traffic data with dissimilar traffic behavior stemming from different road configurations. This is realized by using two distinct highway traffic recordings, the publicly available NGSIM US-101 and I80 data sets. Moreover, methods for encoding structural and static features into the learning process for improved generalization are evaluated. The resulting methods show substantial improvements in classification as well as generalization performance.