 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirst-order friction models with bristle dynamics: lumped and distributed formulations
Feb 11, 2026Dynamic models, particularly rate-dependent models, have proven effective in capturing the key phenomenological features of frictional processes, whilst also possessing important mathematical properties that facilitate the design of control and estimation algorithms. However, many rate-dependent formulations are built on empirical considerations, whereas physical derivations may offer greater interpretability. In this context, starting from fundamental physical principles, this paper introduces a novel class of first-order dynamic friction models that approximate the dynamics of a bristle element by inverting the friction characteristic. Amongst the developed models, a specific formulation closely resembling the LuGre model is derived using a simple rheological equation for the bristle element. This model is rigorously analyzed in terms of stability and passivity -- important properties that support the synthesis of observers and controllers. Furthermore, a distributed version, formulated as a hyperbolic partial differential equation (PDE), is presented, which enables the modeling of frictional processes commonly encountered in rolling contact phenomena. The tribological behavior of the proposed description is evaluated through classical experiments and validated against the response predicted by the LuGre model, revealing both notable similarities and key differences.
Lateral tracking control of all-wheel steering vehicles with intelligent tires
Feb 11, 2026The accurate characterization of tire dynamics is critical for advancing control strategies in autonomous road vehicles, as tire behavior significantly influences handling and stability through the generation of forces and moments at the tire-road interface. Smart tire technologies have emerged as a promising tool for sensing key variables such as road friction, tire pressure, and wear states, and for estimating kinematic and dynamic states like vehicle speed and tire forces. However, most existing estimation and control algorithms rely on empirical correlations or machine learning approaches, which require extensive calibration and can be sensitive to variations in operating conditions. In contrast, model-based techniques, which leverage infinite-dimensional representations of tire dynamics using partial differential equations (PDEs), offer a more robust approach. This paper proposes a novel model-based, output-feedback lateral tracking control strategy for all-wheel steering vehicles that integrates distributed tire dynamics with smart tire technologies. The primary contributions include the suppression of micro-shimmy phenomena at low speeds and path-following via force control, achieved through the estimation of tire slip angles, vehicle kinematics, and lateral tire forces. The proposed controller and observer are based on formulations using ODE-PDE systems, representing rigid body dynamics and distributed tire behavior. This work marks the first rigorous control strategy for vehicular systems equipped with distributed tire representations in conjunction with smart tire technologies.
Semilinear single-track vehicle models with distributed tyre friction dynamics
Jan 11, 2026This paper introduces a novel family of single-track vehicle models that incorporate a distributed representation of transient tyre dynamics, whilst simultaneously accounting for nonlinear effects induced by friction. The core of the proposed framework is represented by the distributed Friction with Bristle Dynamics (FrBD) model, which unifies and extends classical formulations such as Dahl and LuGre by describing the rolling contact process as a spatially distributed system governed by semilinear partial differential equations (PDEs). This model is systematically integrated into a single-track vehicle framework, where the resulting semilinear ODE-PDE interconnection captures the interaction between lateral vehicle motion and tyre deformation. Two main variants are considered: one with rigid tyre carcass and another with flexible carcass, each admitting a compact state-space representation. Local and global well-posedness properties for the coupled system are established rigorously, highlighting the dissipative and physically consistent properties of the distributed FrBD model. A linearisation procedure is also presented, enabling spectral analysis and transfer function derivation, and potentially facilitating the synthesis of controllers and observers. Numerical simulations demonstrate the model's capability to capture micro-shimmy oscillations and transient lateral responses to advanced steering manoeuvres. The proposed formulation advances the state-of-the-art in vehicle dynamics modelling by providing a physically grounded, mathematically rigorous, and computationally tractable approach to incorporating transient tyre behaviour in lateral vehicle dynamics, when accounting for the effect of limited friction.
Behavior-Aware Online Prediction of Obstacle Occupancy using Zonotopes
Oct 23, 2025Predicting the motion of surrounding vehicles is key to safe autonomous driving, especially in unstructured environments without prior information. This paper proposes a novel online method to accurately predict the occupancy sets of surrounding vehicles based solely on motion observations. The approach is divided into two stages: first, an Extended Kalman Filter and a Linear Programming (LP) problem are used to estimate a compact zonotopic set of control actions; then, a reachability analysis propagates this set to predict future occupancy. The effectiveness of the method has been validated through simulations in an urban environment, showing accurate and compact predictions without relying on prior assumptions or prior training data.
Uncertainty-Aware Decision-Making and Planning for Autonomous Forced Merging
Oct 27, 2024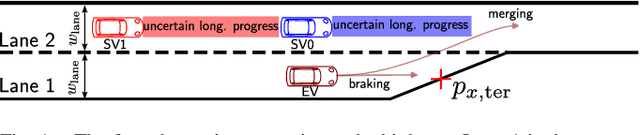
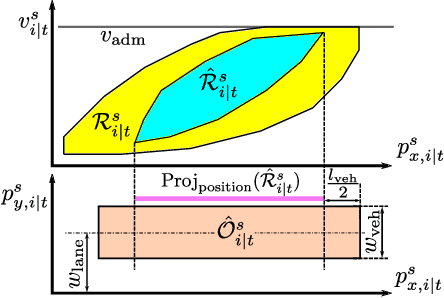
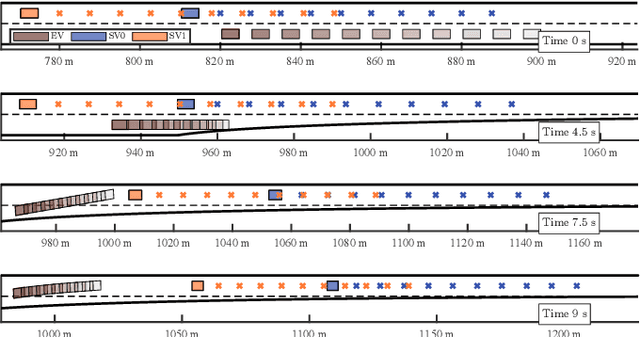
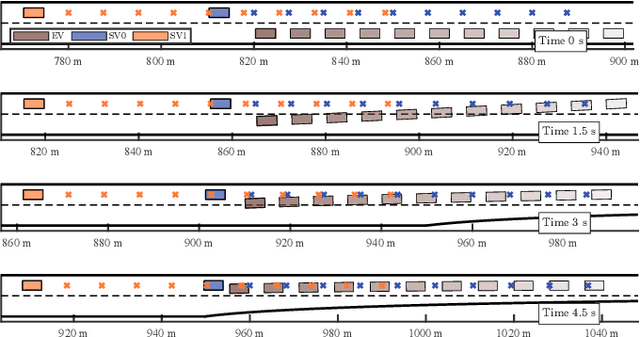
In this paper, we develop an uncertainty-aware decision-making and motion-planning method for an autonomous ego vehicle in forced merging scenarios, considering the motion uncertainty of surrounding vehicles. The method dynamically captures the uncertainty of surrounding vehicles by online estimation of their acceleration bounds, enabling a reactive but rapid understanding of the uncertainty characteristics of the surrounding vehicles. By leveraging these estimated bounds, a non-conservative forward occupancy of surrounding vehicles is predicted over a horizon, which is incorporated in both the decision-making process and the motion-planning strategy, to enhance the resilience and safety of the planned reference trajectory. The method successfully fulfills the tasks in challenging forced merging scenarios, and the properties are illustrated by comparison with several alternative approaches.
A Preprocessing and Evaluation Toolbox for Trajectory Prediction Research on the Drone Datasets
May 01, 2024



The availability of high-quality datasets is crucial for the development of behavior prediction algorithms in autonomous vehicles. This paper highlights the need for standardizing the use of certain datasets for motion forecasting research to simplify comparative analysis and proposes a set of tools and practices to achieve this. Drawing on extensive experience and a comprehensive review of current literature, we summarize our proposals for preprocessing, visualizing, and evaluation in the form of an open-sourced toolbox designed for researchers working on trajectory prediction problems. The clear specification of necessary preprocessing steps and evaluation metrics is intended to alleviate development efforts and facilitate the comparison of results across different studies. The toolbox is available at: https://github.com/westny/dronalize.
Usage-Specific Survival Modeling Based on Operational Data and Neural Networks
Mar 27, 2024



Accurate predictions of when a component will fail are crucial when planning maintenance, and by modeling the distribution of these failure times, survival models have shown to be particularly useful in this context. The presented methodology is based on conventional neural network-based survival models that are trained using data that is continuously gathered and stored at specific times, called snapshots. An important property of this type of training data is that it can contain more than one snapshot from a specific individual which results in that standard maximum likelihood training can not be directly applied since the data is not independent. However, the papers show that if the data is in a specific format where all snapshot times are the same for all individuals, called homogeneously sampled, maximum likelihood training can be applied and produce desirable results. In many cases, the data is not homogeneously sampled and in this case, it is proposed to resample the data to make it homogeneously sampled. How densely the dataset is sampled turns out to be an important parameter; it should be chosen large enough to produce good results, but this also increases the size of the dataset which makes training slow. To reduce the number of samples needed during training, the paper also proposes a technique to, instead of resampling the dataset once before the training starts, randomly resample the dataset at the start of each epoch during the training. The proposed methodology is evaluated on both a simulated dataset and an experimental dataset of starter battery failures. The results show that if the data is homogeneously sampled the methodology works as intended and produces accurate survival models. The results also show that randomly resampling the dataset on each epoch is an effective way to reduce the size of the training data.
Neural Network-Based Piecewise Survival Models
Mar 27, 2024


In this paper, a family of neural network-based survival models is presented. The models are specified based on piecewise definitions of the hazard function and the density function on a partitioning of the time; both constant and linear piecewise definitions are presented, resulting in a family of four models. The models can be seen as an extension of the commonly used discrete-time and piecewise exponential models and thereby add flexibility to this set of standard models. Using a simulated dataset the models are shown to perform well compared to the highly expressive, state-of-the-art energy-based model, while only requiring a fraction of the computation time.
Diffusion-Based Environment-Aware Trajectory Prediction
Mar 18, 2024



The ability to predict the future trajectories of traffic participants is crucial for the safe and efficient operation of autonomous vehicles. In this paper, a diffusion-based generative model for multi-agent trajectory prediction is proposed. The model is capable of capturing the complex interactions between traffic participants and the environment, accurately learning the multimodal nature of the data. The effectiveness of the approach is assessed on large-scale datasets of real-world traffic scenarios, showing that our model outperforms several well-established methods in terms of prediction accuracy. By the incorporation of differential motion constraints on the model output, we illustrate that our model is capable of generating a diverse set of realistic future trajectories. Through the use of an interaction-aware guidance signal, we further demonstrate that the model can be adapted to predict the behavior of less cooperative agents, emphasizing its practical applicability under uncertain traffic conditions.
Robust Predictive Motion Planning by Learning Obstacle Uncertainty
Mar 10, 2024



Safe motion planning for robotic systems in dynamic environments is nontrivial in the presence of uncertain obstacles, where estimation of obstacle uncertainties is crucial in predicting future motions of dynamic obstacles. The worst-case characterization gives a conservative uncertainty prediction and may result in infeasible motion planning for the ego robotic system. In this paper, an efficient, robust, and safe motion-planing algorithm is developed by learning the obstacle uncertainties online. More specifically, the unknown yet intended control set of obstacles is efficiently computed by solving a linear programming problem. The learned control set is used to compute forward reachable sets of obstacles that are less conservative than the worst-case prediction. Based on the forward prediction, a robust model predictive controller is designed to compute a safe reference trajectory for the ego robotic system that remains outside the reachable sets of obstacles over the prediction horizon. The method is applied to a car-like mobile robot in both simulations and hardware experiments to demonstrate its effectiveness.