 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Mixture of States: Routing Token-Level Dynamics for Multimodal Generation
Nov 15, 2025We introduce MoS (Mixture of States), a novel fusion paradigm for multimodal diffusion models that merges modalities using flexible, state-based interactions. The core of MoS is a learnable, token-wise router that creates denoising timestep- and input-dependent interactions between modalities' hidden states, precisely aligning token-level features with the diffusion trajectory. This router sparsely selects the top-$k$ hidden states and is trained with an $ε$-greedy strategy, efficiently selecting contextual features with minimal learnable parameters and negligible computational overhead. We validate our design with text-to-image generation (MoS-Image) and editing (MoS-Editing), which achieve state-of-the-art results. With only 3B to 5B parameters, our models match or surpass counterparts up to $4\times$ larger. These findings establish MoS as a flexible and compute-efficient paradigm for scaling multimodal diffusion models.
QuantBench: Benchmarking AI Methods for Quantitative Investment
Apr 24, 2025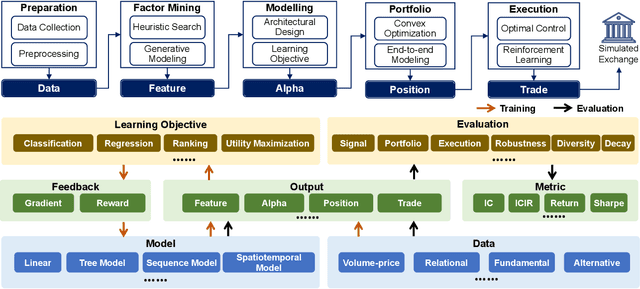



The field of artificial intelligence (AI) in quantitative investment has seen significant advancements, yet it lacks a standardized benchmark aligned with industry practices. This gap hinders research progress and limits the practical application of academic innovations. We present QuantBench, an industrial-grade benchmark platform designed to address this critical need. QuantBench offers three key strengths: (1) standardization that aligns with quantitative investment industry practices, (2) flexibility to integrate various AI algorithms, and (3) full-pipeline coverage of the entire quantitative investment process. Our empirical studies using QuantBench reveal some critical research directions, including the need for continual learning to address distribution shifts, improved methods for modeling relational financial data, and more robust approaches to mitigate overfitting in low signal-to-noise environments. By providing a common ground for evaluation and fostering collaboration between researchers and practitioners, QuantBench aims to accelerate progress in AI for quantitative investment, similar to the impact of benchmark platforms in computer vision and natural language processing.
Learning to compile smartly for program size reduction
Jan 09, 2023Compiler optimization passes are an important tool for improving program efficiency and reducing program size, but manually selecting optimization passes can be time-consuming and error-prone. While human experts have identified a few fixed sequences of optimization passes (e.g., the Clang -Oz passes) that perform well for a wide variety of programs, these sequences are not conditioned on specific programs. In this paper, we propose a novel approach that learns a policy to select passes for program size reduction, allowing for customization and adaptation to specific programs. Our approach uses a search mechanism that helps identify useful pass sequences and a GNN with customized attention that selects the optimal sequence to use. Crucially it is able to generalize to new, unseen programs, making it more flexible and general than previous approaches. We evaluate our approach on a range of programs and show that it leads to size reduction compared to traditional optimization techniques. Our results demonstrate the potential of a single policy that is able to optimize many programs.
CompilerGym: Robust, Performant Compiler Optimization Environments for AI Research
Sep 17, 2021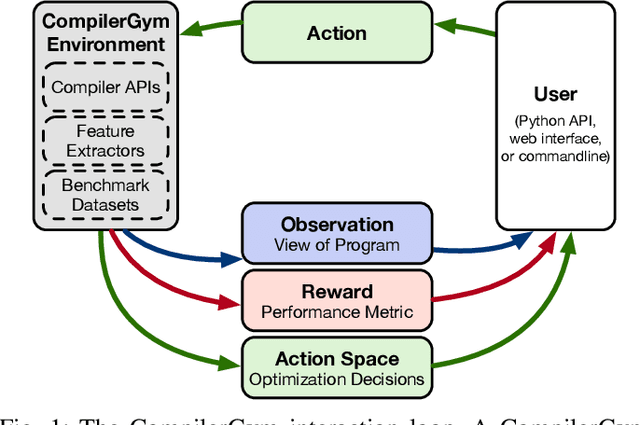
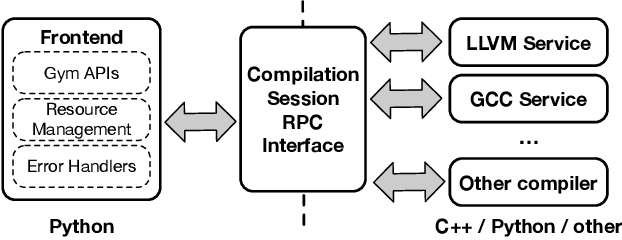
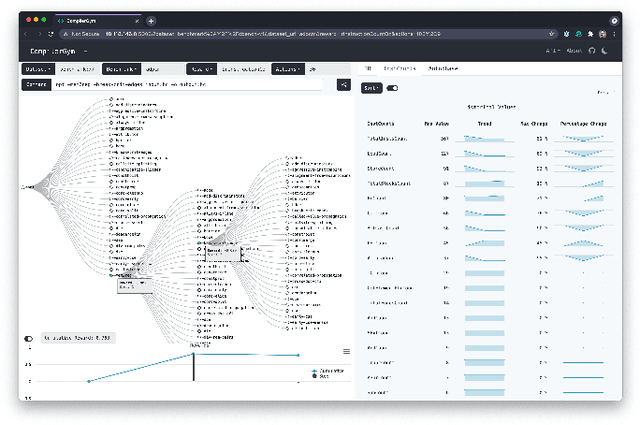
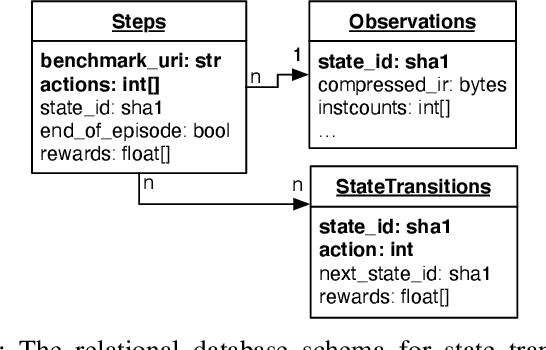
Interest in applying Artificial Intelligence (AI) techniques to compiler optimizations is increasing rapidly, but compiler research has a high entry barrier. Unlike in other domains, compiler and AI researchers do not have access to the datasets and frameworks that enable fast iteration and development of ideas, and getting started requires a significant engineering investment. What is needed is an easy, reusable experimental infrastructure for real world compiler optimization tasks that can serve as a common benchmark for comparing techniques, and as a platform to accelerate progress in the field. We introduce CompilerGym, a set of environments for real world compiler optimization tasks, and a toolkit for exposing new optimization tasks to compiler researchers. CompilerGym enables anyone to experiment on production compiler optimization problems through an easy-to-use package, regardless of their experience with compilers. We build upon the popular OpenAI Gym interface enabling researchers to interact with compilers using Python and a familiar API. We describe the CompilerGym architecture and implementation, characterize the optimization spaces and computational efficiencies of three included compiler environments, and provide extensive empirical evaluations. Compared to prior works, CompilerGym offers larger datasets and optimization spaces, is 27x more computationally efficient, is fault-tolerant, and capable of detecting reproducibility bugs in the underlying compilers. In making it easy for anyone to experiment with compilers - irrespective of their background - we aim to accelerate progress in the AI and compiler research domains.
Safe Exploration by Solving Early Terminated MDP
Jul 09, 2021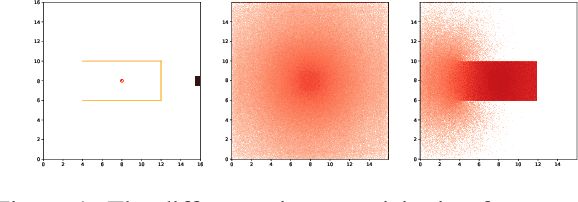
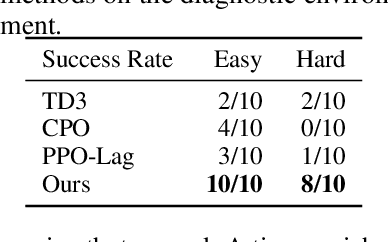

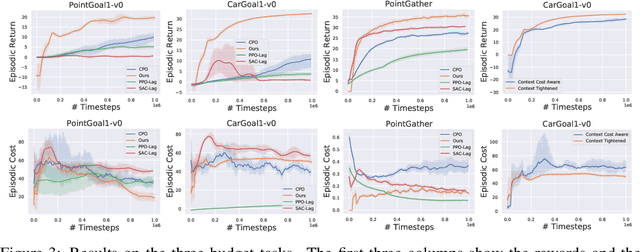
Safe exploration is crucial for the real-world application of reinforcement learning (RL). Previous works consider the safe exploration problem as Constrained Markov Decision Process (CMDP), where the policies are being optimized under constraints. However, when encountering any potential dangers, human tends to stop immediately and rarely learns to behave safely in danger. Motivated by human learning, we introduce a new approach to address safe RL problems under the framework of Early Terminated MDP (ET-MDP). We first define the ET-MDP as an unconstrained MDP with the same optimal value function as its corresponding CMDP. An off-policy algorithm based on context models is then proposed to solve the ET-MDP, which thereby solves the corresponding CMDP with better asymptotic performance and improved learning efficiency. Experiments on various CMDP tasks show a substantial improvement over previous methods that directly solve CMDP.
Unsupervised Star Galaxy Classification with Cascade Variational Auto-Encoder
Oct 30, 2019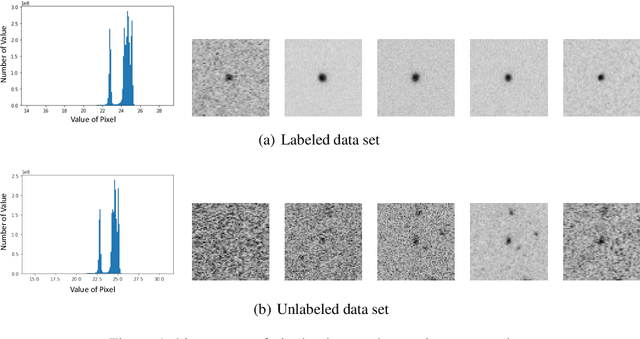

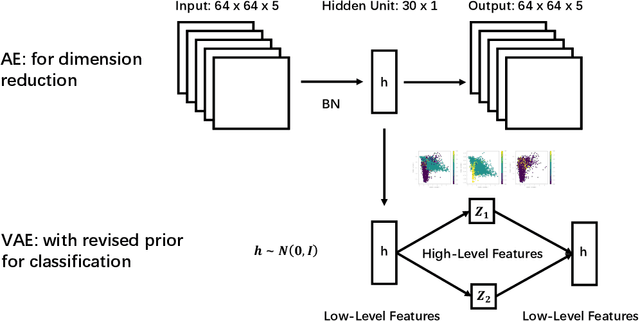
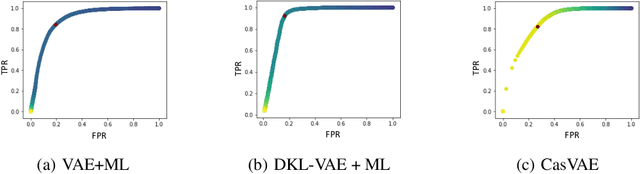
The increasing amount of data in astronomy provides great challenges for machine learning research. Previously, supervised learning methods achieved satisfactory recognition accuracy for the star-galaxy classification task, based on manually labeled data set. In this work, we propose a novel unsupervised approach for the star-galaxy recognition task, namely Cascade Variational Auto-Encoder (CasVAE). Our empirical results show our method outperforms the baseline model in both accuracy and stability.
Adaptive Regularization of Labels
Aug 15, 2019
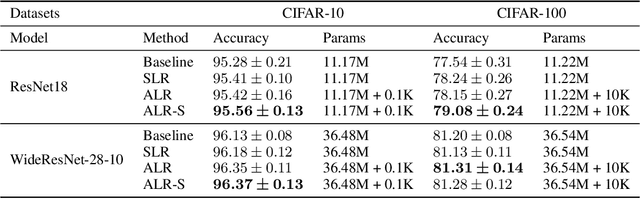
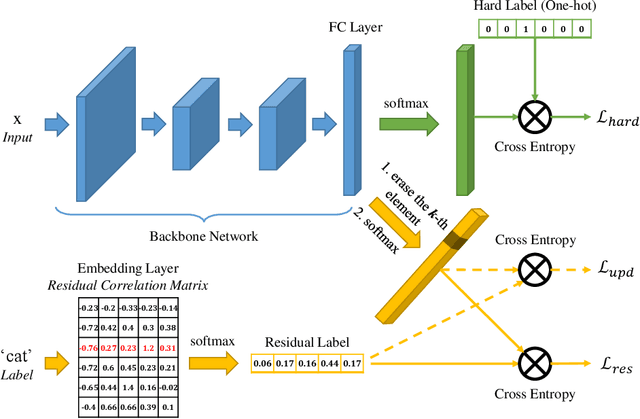
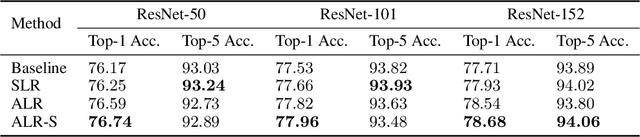
Recently, a variety of regularization techniques have been widely applied in deep neural networks, such as dropout, batch normalization, data augmentation, and so on. These methods mainly focus on the regularization of weight parameters to prevent overfitting effectively. In addition, label regularization techniques such as label smoothing and label disturbance have also been proposed with the motivation of adding a stochastic perturbation to labels. In this paper, we propose a novel adaptive label regularization method, which enables the neural network to learn from the erroneous experience and update the optimal label representation online. On the other hand, compared with knowledge distillation, which learns the correlation of categories using teacher network, our proposed method requires only a minuscule increase in parameters without cumbersome teacher network. Furthermore, we evaluate our method on CIFAR-10/CIFAR-100/ImageNet datasets for image recognition tasks and AGNews/Yahoo/Yelp-Full datasets for text classification tasks. The empirical results show significant improvement under all experimental settings.
Robust Photogeometric Localization over Time for Map-Centric Loop Closure
Jan 30, 2019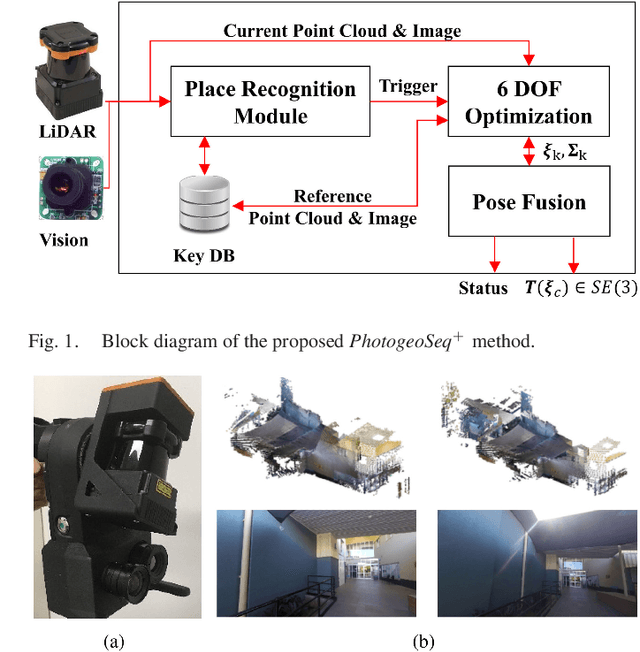
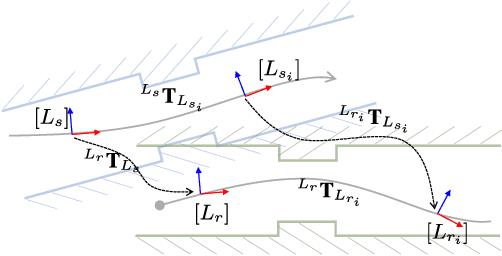
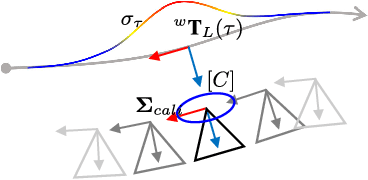
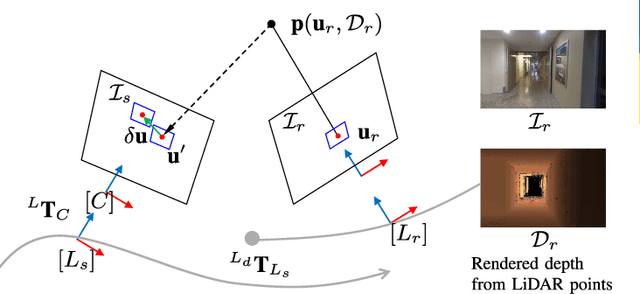
Map-centric SLAM is emerging as an alternative of conventional graph-based SLAM for its accuracy and efficiency in long-term mapping problems. However, in map-centric SLAM, the process of loop closure differs from that of conventional SLAM and the result of incorrect loop closure is more destructive and is not reversible. In this paper, we present a tightly coupled photogeometric metric localization for the loop closure problem in map-centric SLAM. In particular, our method combines complementary constraints from LiDAR and camera sensors, and validates loop closure candidates with sequential observations. The proposed method provides a visual evidence-based outlier rejection where failures caused by either place recognition or localization outliers can be effectively removed. We demonstrate the proposed method is not only more accurate than the conventional global ICP methods but is also robust to incorrect initial pose guesses.
Local Descriptor for Robust Place Recognition using LiDAR Intensity
Nov 30, 2018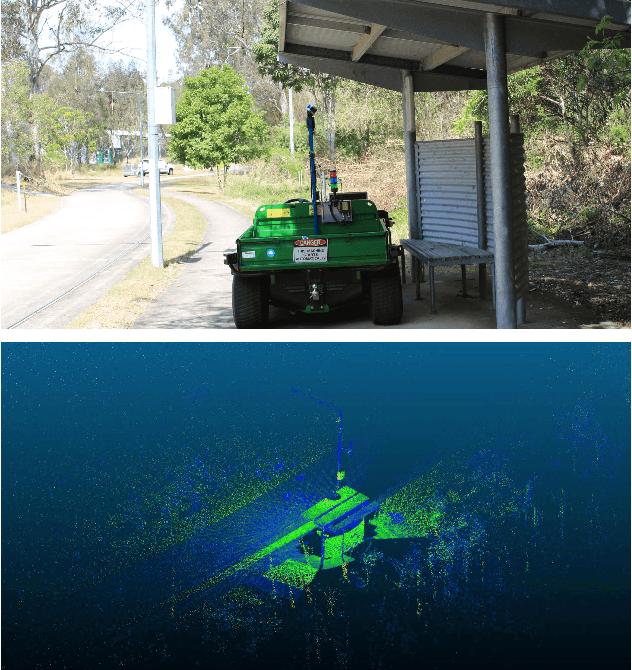
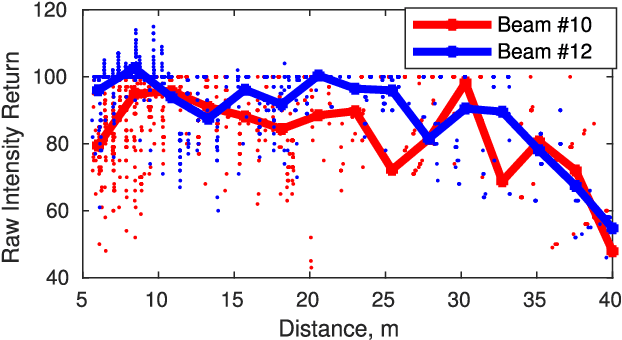

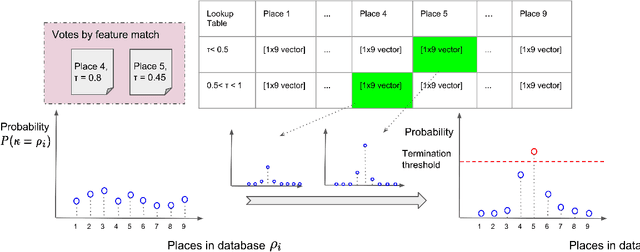
Place recognition is a challenging problem in mobile robotics, especially in unstructured environments or under viewpoint and illumination changes. Most LiDAR-based methods rely on geometrical features to overcome such challenges, as generally scene geometry is invariant to these changes, but tend to affect camera-based solutions significantly. Compared to cameras, however, LiDARs lack the strong and descriptive appearance information that imaging can provide. To combine the benefits of geometry and appearance, we propose coupling the conventional geometric information from the LiDAR with its calibrated intensity return. This strategy extracts extremely useful information in the form of a new descriptor design, coined ISHOT, outperforming popular state-of-art geometric-only descriptors by significant margin in our local descriptor evaluation. To complete the framework, we furthermore develop a probabilistic keypoint voting place recognition algorithm, leveraging the new descriptor and yielding sublinear place recognition performance. The efficacy of our approach is validated in challenging global localization experiments in large-scale built-up and unstructured environments.