 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCORAL: Towards Autonomous Multi-Agent Evolution for Open-Ended Discovery
Apr 02, 2026Large language model (LLM)-based evolution is a promising approach for open-ended discovery, where progress requires sustained search and knowledge accumulation. Existing methods still rely heavily on fixed heuristics and hard-coded exploration rules, which limit the autonomy of LLM agents. We present CORAL, the first framework for autonomous multi-agent evolution on open-ended problems. CORAL replaces rigid control with long-running agents that explore, reflect, and collaborate through shared persistent memory, asynchronous multi-agent execution, and heartbeat-based interventions. It also provides practical safeguards, including isolated workspaces, evaluator separation, resource management, and agent session and health management. Evaluated on diverse mathematical, algorithmic, and systems optimization tasks, CORAL sets new state-of-the-art results on 10 tasks, achieving 3-10 times higher improvement rates with far fewer evaluations than fixed evolutionary search baselines across tasks. On Anthropic's kernel engineering task, four co-evolving agents improve the best known score from 1363 to 1103 cycles. Mechanistic analyses further show how these gains arise from knowledge reuse and multi-agent exploration and communication. Together, these results suggest that greater agent autonomy and multi-agent evolution can substantially improve open-ended discovery. Code is available at https://github.com/Human-Agent-Society/CORAL.
Learning-guided Prioritized Planning for Lifelong Multi-Agent Path Finding in Warehouse Automation
Mar 25, 2026Lifelong Multi-Agent Path Finding (MAPF) is critical for modern warehouse automation, which requires multiple robots to continuously navigate conflict-free paths to optimize the overall system throughput. However, the complexity of warehouse environments and the long-term dynamics of lifelong MAPF often demand costly adaptations to classical search-based solvers. While machine learning methods have been explored, their superiority over search-based methods remains inconclusive. In this paper, we introduce Reinforcement Learning (RL) guided Rolling Horizon Prioritized Planning (RL-RH-PP), the first framework integrating RL with search-based planning for lifelong MAPF. Specifically, we leverage classical Prioritized Planning (PP) as a backbone for its simplicity and flexibility in integrating with a learning-based priority assignment policy. By formulating dynamic priority assignment as a Partially Observable Markov Decision Process (POMDP), RL-RH-PP exploits the sequential decision-making nature of lifelong planning while delegating complex spatial-temporal interactions among agents to reinforcement learning. An attention-based neural network autoregressively decodes priority orders on-the-fly, enabling efficient sequential single-agent planning by the PP planner. Evaluations in realistic warehouse simulations show that RL-RH-PP achieves the highest total throughput among baselines and generalizes effectively across agent densities, planning horizons, and warehouse layouts. Our interpretive analyses reveal that RL-RH-PP proactively prioritizes congested agents and strategically redirects agents from congestion, easing traffic flow and boosting throughput. These findings highlight the potential of learning-guided approaches to augment traditional heuristics in modern warehouse automation.
OSNIP: Breaking the Privacy-Utility-Efficiency Trilemma in LLM Inference via Obfuscated Semantic Null Space
Jan 30, 2026We propose Obfuscated Semantic Null space Injection for Privacy (OSNIP), a lightweight client-side encryption framework for privacy-preserving LLM inference. Generalizing the geometric intuition of linear kernels to the high-dimensional latent space of LLMs, we formally define the ``Obfuscated Semantic Null Space'', a high-dimensional regime that preserves semantic fidelity while enforcing near-orthogonality to the original embedding. By injecting perturbations that project the original embedding into this space, OSNIP ensures privacy without any post-processing. Furthermore, OSNIP employs a key-dependent stochastic mapping that synthesizes individualized perturbation trajectories unique to each user. Evaluations on 12 generative and classification benchmarks show that OSNIP achieves state-of-the-art performance, sharply reducing attack success rates while maintaining strong model utility under strict security constraints.
CP-Router: An Uncertainty-Aware Router Between LLM and LRM
May 26, 2025Recent advances in Large Reasoning Models (LRMs) have significantly improved long-chain reasoning capabilities over Large Language Models (LLMs). However, LRMs often produce unnecessarily lengthy outputs even for simple queries, leading to inefficiencies or even accuracy degradation compared to LLMs. To overcome this, we propose CP-Router, a training-free and model-agnostic routing framework that dynamically selects between an LLM and an LRM, demonstrated with multiple-choice question answering (MCQA) prompts. The routing decision is guided by the prediction uncertainty estimates derived via Conformal Prediction (CP), which provides rigorous coverage guarantees. To further refine the uncertainty differentiation across inputs, we introduce Full and Binary Entropy (FBE), a novel entropy-based criterion that adaptively selects the appropriate CP threshold. Experiments across diverse MCQA benchmarks, including mathematics, logical reasoning, and Chinese chemistry, demonstrate that CP-Router efficiently reduces token usage while maintaining or even improving accuracy compared to using LRM alone. We also extend CP-Router to diverse model pairings and open-ended QA, where it continues to demonstrate strong performance, validating its generality and robustness.
Embodied Escaping: End-to-End Reinforcement Learning for Robot Navigation in Narrow Environment
Mar 05, 2025



Autonomous navigation is a fundamental task for robot vacuum cleaners in indoor environments. Since their core function is to clean entire areas, robots inevitably encounter dead zones in cluttered and narrow scenarios. Existing planning methods often fail to escape due to complex environmental constraints, high-dimensional search spaces, and high difficulty maneuvers. To address these challenges, this paper proposes an embodied escaping model that leverages reinforcement learning-based policy with an efficient action mask for dead zone escaping. To alleviate the issue of the sparse reward in training, we introduce a hybrid training policy that improves learning efficiency. In handling redundant and ineffective action options, we design a novel action representation to reshape the discrete action space with a uniform turning radius. Furthermore, we develop an action mask strategy to select valid action quickly, balancing precision and efficiency. In real-world experiments, our robot is equipped with a Lidar, IMU, and two-wheel encoders. Extensive quantitative and qualitative experiments across varying difficulty levels demonstrate that our robot can consistently escape from challenging dead zones. Moreover, our approach significantly outperforms compared path planning and reinforcement learning methods in terms of success rate and collision avoidance.
D$^2$-DPM: Dual Denoising for Quantized Diffusion Probabilistic Models
Jan 14, 2025



Diffusion models have achieved cutting-edge performance in image generation. However, their lengthy denoising process and computationally intensive score estimation network impede their scalability in low-latency and resource-constrained scenarios. Post-training quantization (PTQ) compresses and accelerates diffusion models without retraining, but it inevitably introduces additional quantization noise, resulting in mean and variance deviations. In this work, we propose D2-DPM, a dual denoising mechanism aimed at precisely mitigating the adverse effects of quantization noise on the noise estimation network. Specifically, we first unravel the impact of quantization noise on the sampling equation into two components: the mean deviation and the variance deviation. The mean deviation alters the drift coefficient of the sampling equation, influencing the trajectory trend, while the variance deviation magnifies the diffusion coefficient, impacting the convergence of the sampling trajectory. The proposed D2-DPM is thus devised to denoise the quantization noise at each time step, and then denoise the noisy sample through the inverse diffusion iterations. Experimental results demonstrate that D2-DPM achieves superior generation quality, yielding a 1.42 lower FID than the full-precision model while achieving 3.99x compression and 11.67x bit-operation acceleration.
Training-free Heterogeneous Model Merging
Dec 29, 2024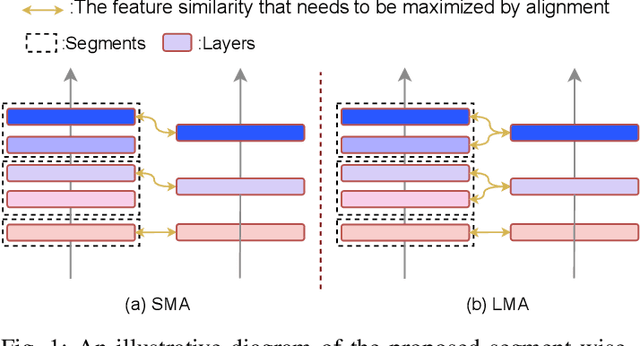



Model merging has attracted significant attention as a powerful paradigm for model reuse, facilitating the integration of task-specific models into a singular, versatile framework endowed with multifarious capabilities. Previous studies, predominantly utilizing methods such as Weight Average (WA), have shown that model merging can effectively leverage pretrained models without the need for laborious retraining. However, the inherent heterogeneity among models poses a substantial constraint on its applicability, particularly when confronted with discrepancies in model architectures. To overcome this challenge, we propose an innovative model merging framework designed for heterogeneous models, encompassing both depth and width heterogeneity. To address depth heterogeneity, we introduce a layer alignment strategy that harmonizes model layers by segmenting deeper models, treating consecutive layers with similar representations as a cohesive segment, thus enabling the seamless merging of models with differing layer depths. For width heterogeneity, we propose a novel elastic neuron zipping algorithm that projects the weights from models of varying widths onto a common dimensional space, eliminating the need for identical widths. Extensive experiments validate the efficacy of these proposed methods, demonstrating that the merging of structurally heterogeneous models can achieve performance levels comparable to those of homogeneous merging, across both vision and NLP tasks. Our code is publicly available at https://github.com/zju-vipa/training_free_heterogeneous_model_merging.
Multi-agent Path Finding for Mixed Autonomy Traffic Coordination
Sep 05, 2024



In the evolving landscape of urban mobility, the prospective integration of Connected and Automated Vehicles (CAVs) with Human-Driven Vehicles (HDVs) presents a complex array of challenges and opportunities for autonomous driving systems. While recent advancements in robotics have yielded Multi-Agent Path Finding (MAPF) algorithms tailored for agent coordination task characterized by simplified kinematics and complete control over agent behaviors, these solutions are inapplicable in mixed-traffic environments where uncontrollable HDVs must coexist and interact with CAVs. Addressing this gap, we propose the Behavior Prediction Kinematic Priority Based Search (BK-PBS), which leverages an offline-trained conditional prediction model to forecast HDV responses to CAV maneuvers, integrating these insights into a Priority Based Search (PBS) where the A* search proceeds over motion primitives to accommodate kinematic constraints. We compare BK-PBS with CAV planning algorithms derived by rule-based car-following models, and reinforcement learning. Through comprehensive simulation on a highway merging scenario across diverse scenarios of CAV penetration rate and traffic density, BK-PBS outperforms these baselines in reducing collision rates and enhancing system-level travel delay. Our work is directly applicable to many scenarios of multi-human multi-robot coordination.
Multi-agent Path Finding for Cooperative Autonomous Driving
Feb 01, 2024


Anticipating possible future deployment of connected and automated vehicles (CAVs), cooperative autonomous driving at intersections has been studied by many works in control theory and intelligent transportation across decades. Simultaneously, recent parallel works in robotics have devised efficient algorithms for multi-agent path finding (MAPF), though often in environments with simplified kinematics. In this work, we hybridize insights and algorithms from MAPF with the structure and heuristics of optimizing the crossing order of CAVs at signal-free intersections. We devise an optimal and complete algorithm, Order-based Search with Kinematics Arrival Time Scheduling (OBS-KATS), which significantly outperforms existing algorithms, fixed heuristics, and prioritized planning with KATS. The performance is maintained under different vehicle arrival rates, lane lengths, crossing speeds, and control horizon. Through ablations and dissections, we offer insight on the contributing factors to OBS-KATS's performance. Our work is directly applicable to many similarly scaled traffic and multi-robot scenarios with directed lanes.
Adaptive Policy Learning for Offline-to-Online Reinforcement Learning
Mar 14, 2023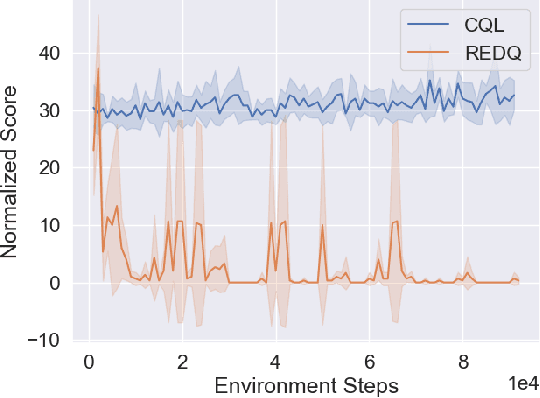
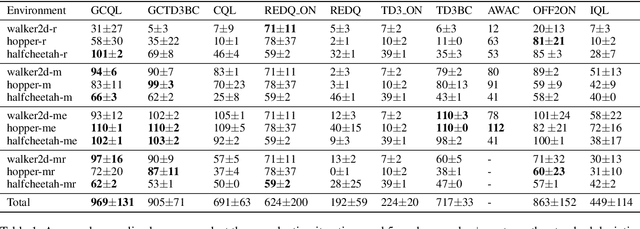
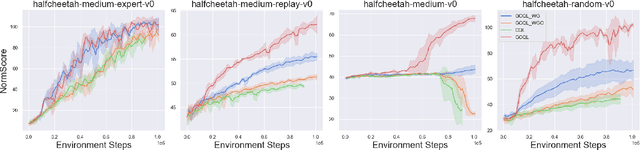
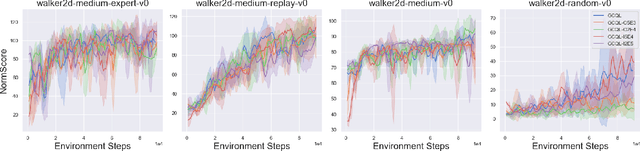
Conventional reinforcement learning (RL) needs an environment to collect fresh data, which is impractical when online interactions are costly. Offline RL provides an alternative solution by directly learning from the previously collected dataset. However, it will yield unsatisfactory performance if the quality of the offline datasets is poor. In this paper, we consider an offline-to-online setting where the agent is first learned from the offline dataset and then trained online, and propose a framework called Adaptive Policy Learning for effectively taking advantage of offline and online data. Specifically, we explicitly consider the difference between the online and offline data and apply an adaptive update scheme accordingly, that is, a pessimistic update strategy for the offline dataset and an optimistic/greedy update scheme for the online dataset. Such a simple and effective method provides a way to mix the offline and online RL and achieve the best of both worlds. We further provide two detailed algorithms for implementing the framework through embedding value or policy-based RL algorithms into it. Finally, we conduct extensive experiments on popular continuous control tasks, and results show that our algorithm can learn the expert policy with high sample efficiency even when the quality of offline dataset is poor, e.g., random dataset.