 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouching the tumor boundary: A pilot study on ultrasound based virtual fixtures for breast-conserving surgery
Oct 01, 2025Purpose: Delineating tumor boundaries during breast-conserving surgery is challenging as tumors are often highly mobile, non-palpable, and have irregularly shaped borders. To address these challenges, we introduce a cooperative robotic guidance system that applies haptic feedback for tumor localization. In this pilot study, we aim to assess if and how this system can be successfully integrated into breast cancer care. Methods: A small haptic robot is retrofitted with an electrocautery blade to operate as a cooperatively controlled surgical tool. Ultrasound and electromagnetic navigation are used to identify the tumor boundaries and position. A forbidden region virtual fixture is imposed when the surgical tool collides with the tumor boundary. We conducted a study where users were asked to resect tumors from breast simulants both with and without the haptic guidance. We then assess the results of these simulated resections both qualitatively and quantitatively. Results: Virtual fixture guidance is shown to improve resection margins. On average, users find the task to be less mentally demanding, frustrating, and effort intensive when haptic feedback is available. We also discovered some unanticipated impacts on surgical workflow that will guide design adjustments and training protocol moving forward. Conclusion: Our results suggest that virtual fixtures can help localize tumor boundaries in simulated breast-conserving surgery. Future work will include an extensive user study to further validate these results and fine-tune our guidance system.
Open-Source Multi-Viewpoint Surgical Telerobotics
May 16, 2025As robots for minimally invasive surgery (MIS) gradually become more accessible and modular, we believe there is a great opportunity to rethink and expand the visualization and control paradigms that have characterized surgical teleoperation since its inception. We conjecture that introducing one or more additional adjustable viewpoints in the abdominal cavity would not only unlock novel visualization and collaboration strategies for surgeons but also substantially boost the robustness of machine perception toward shared autonomy. Immediate advantages include controlling a second viewpoint and teleoperating surgical tools from a different perspective, which would allow collaborating surgeons to adjust their views independently and still maneuver their robotic instruments intuitively. Furthermore, we believe that capturing synchronized multi-view 3D measurements of the patient's anatomy would unlock advanced scene representations. Accurate real-time intraoperative 3D perception will allow algorithmic assistants to directly control one or more robotic instruments and/or robotic cameras. Toward these goals, we are building a synchronized multi-viewpoint, multi-sensor robotic surgery system by integrating high-performance vision components and upgrading the da Vinci Research Kit control logic. This short paper reports a functional summary of our setup and elaborates on its potential impacts in research and future clinical practice. By fully open-sourcing our system, we will enable the research community to reproduce our setup, improve it, and develop powerful algorithms, effectively boosting clinical translation of cutting-edge research.
SRT-H: A Hierarchical Framework for Autonomous Surgery via Language Conditioned Imitation Learning
May 15, 2025Research on autonomous robotic surgery has largely focused on simple task automation in controlled environments. However, real-world surgical applications require dexterous manipulation over extended time scales while demanding generalization across diverse variations in human tissue. These challenges remain difficult to address using existing logic-based or conventional end-to-end learning strategies. To bridge this gap, we propose a hierarchical framework for dexterous, long-horizon surgical tasks. Our method employs a high-level policy for task planning and a low-level policy for generating task-space controls for the surgical robot. The high-level planner plans tasks using language, producing task-specific or corrective instructions that guide the robot at a coarse level. Leveraging language as a planning modality offers an intuitive and generalizable interface, mirroring how experienced surgeons instruct traineers during procedures. We validate our framework in ex-vivo experiments on a complex minimally invasive procedure, cholecystectomy, and conduct ablative studies to assess key design choices. Our approach achieves a 100% success rate across n=8 different ex-vivo gallbladders, operating fully autonomously without human intervention. The hierarchical approach greatly improves the policy's ability to recover from suboptimal states that are inevitable in the highly dynamic environment of realistic surgical applications. This work represents the first demonstration of step-level autonomy, marking a critical milestone toward autonomous surgical systems for clinical studies. By advancing generalizable autonomy in surgical robotics, our approach brings the field closer to real-world deployment.
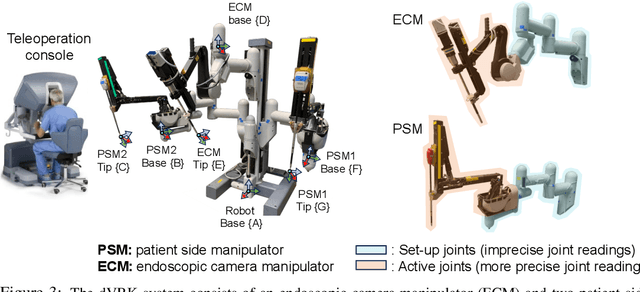
Gravity Compensation of the dVRK-Si Patient Side Manipulator based on Dynamic Model Identification
Jan 31, 2025The da Vinci Research Kit (dVRK, also known as dVRK Classic) is an open-source teleoperated surgical robotic system whose hardware is obtained from the first generation da Vinci Surgical System (Intuitive, Sunnyvale, CA, USA). The dVRK has greatly facilitated research in robot-assisted surgery over the past decade and helped researchers address multiple major challenges in this domain. Recently, the dVRK-Si system, a new version of the dVRK which uses mechanical components from the da Vinci Si Surgical System, became available to the community. The major difference between the first generation da Vinci and the da Vinci Si is in the structural upgrade of the Patient Side Manipulator (PSM). Because of this upgrade, the gravity of the dVRK-Si PSM can no longer be ignored as in the dVRK Classic. The high gravity offset may lead to relatively low control accuracy and longer response time. In addition, although substantial progress has been made in addressing the dynamic model identification problem for the dVRK Classic, further research is required on model-based control for the dVRK-Si, due to differences in mechanical components and the demand for enhanced control performance. To address these problems, in this work, we present (1) a novel full kinematic model of the dVRK-Si PSM, and (2) a gravity compensation approach based on the dynamic model identification.
Surgical Robot Transformer (SRT): Imitation Learning for Surgical Tasks
Jul 17, 2024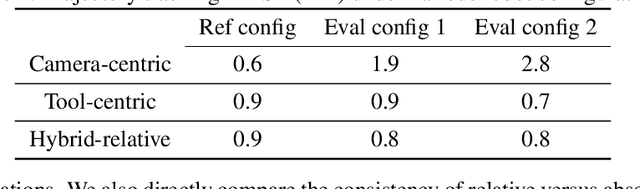
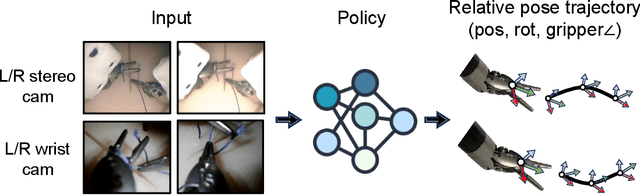
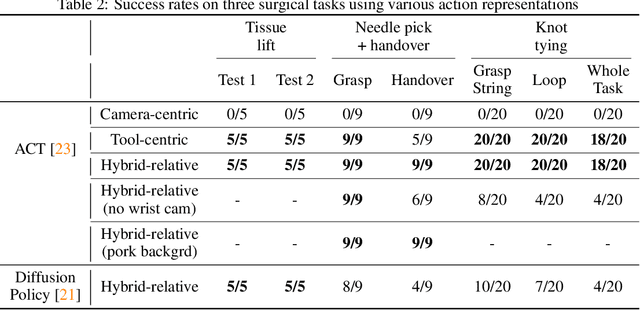
We explore whether surgical manipulation tasks can be learned on the da Vinci robot via imitation learning. However, the da Vinci system presents unique challenges which hinder straight-forward implementation of imitation learning. Notably, its forward kinematics is inconsistent due to imprecise joint measurements, and naively training a policy using such approximate kinematics data often leads to task failure. To overcome this limitation, we introduce a relative action formulation which enables successful policy training and deployment using its approximate kinematics data. A promising outcome of this approach is that the large repository of clinical data, which contains approximate kinematics, may be directly utilized for robot learning without further corrections. We demonstrate our findings through successful execution of three fundamental surgical tasks, including tissue manipulation, needle handling, and knot-tying.
An Effectiveness Study Across Baseline and Neural Network-based Force Estimation Methods on the da Vinci Research Kit Si System
May 13, 2024



In this study, we further investigate the robustness and generalization ability of an neural network (NN) based force estimation method, using the da Vinci Research Kit Si (dVRK-Si). To evaluate our method's performance, we compare the force estimation accuracy with several baseline methods. We conduct comparative studies between the dVRK classic and dVRK-Si systems to benchmark the effectiveness of these approaches. We conclude that the NN-based method provides comparable force estimation accuracy across the two systems, as the average root mean square error (RMSE) over the average range of force ratio is approximately 3.07% for the dVRK classic, and 5.27% for the dVRK-Si. On the dVRK-Si, the force estimation RMSEs for all the baseline methods are 2 to 4 times larger than the NN-based method in all directions. One possible reason is, we made assumptions in the baseline methods that static forces remain the same or dynamics is time-invariant. These assumptions may hold for the dVRK Classic, as it has pre-loaded weight and maintains horizontal self balance. Since the dVRK-Si configuration does not have this property, assumptions do not hold anymore, therefore the NN-based method significantly outperforms.
Integrating 3D Slicer with a Dynamic Simulator for Situational Aware Robotic Interventions
Jan 22, 2024



Image-guided robotic interventions represent a transformative frontier in surgery, blending advanced imaging and robotics for improved precision and outcomes. This paper addresses the critical need for integrating open-source platforms to enhance situational awareness in image-guided robotic research. We present an open-source toolset that seamlessly combines a physics-based constraint formulation framework, AMBF, with a state-of-the-art imaging platform application, 3D Slicer. Our toolset facilitates the creation of highly customizable interactive digital twins, that incorporates processing and visualization of medical imaging, robot kinematics, and scene dynamics for real-time robot control. Through a feasibility study, we showcase real-time synchronization of a physical robotic interventional environment in both 3D Slicer and AMBF, highlighting low-latency updates and improved visualization.
Learning Deep Nets for Gravitational Dynamics with Unknown Disturbance through Physical Knowledge Distillation: Initial Feasibility Study
Oct 04, 2022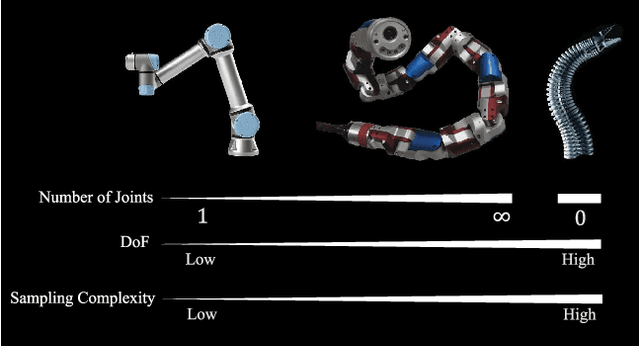
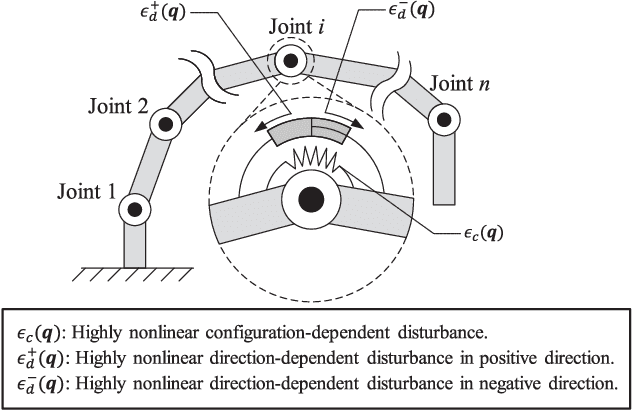
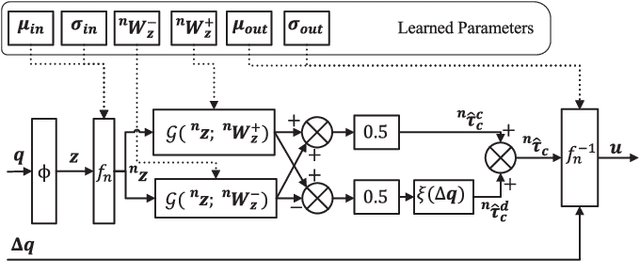
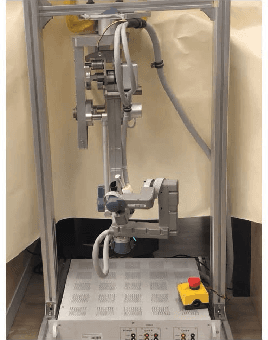
Learning high-performance deep neural networks for dynamic modeling of high Degree-Of-Freedom (DOF) robots remains challenging due to the sampling complexity. Typical unknown system disturbance caused by unmodeled dynamics (such as internal compliance, cables) further exacerbates the problem. In this paper, a novel framework characterized by both high data efficiency and disturbance-adapting capability is proposed to address the problem of modeling gravitational dynamics using deep nets in feedforward gravity compensation control for high-DOF master manipulators with unknown disturbance. In particular, Feedforward Deep Neural Networks (FDNNs) are learned from both prior knowledge of an existing analytical model and observation of the robot system by Knowledge Distillation (KD). Through extensive experiments in high-DOF master manipulators with significant disturbance, we show that our method surpasses a standard Learning-from-Scratch (LfS) approach in terms of data efficiency and disturbance adaptation. Our initial feasibility study has demonstrated the potential of outperforming the analytical teacher model as the training data increases.
Integrating Artificial Intelligence and Augmented Reality in Robotic Surgery: An Initial dVRK Study Using a Surgical Education Scenario
Jan 02, 2022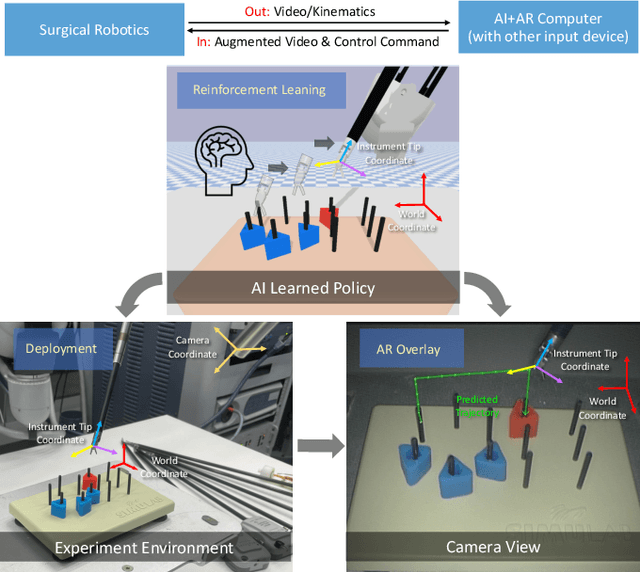
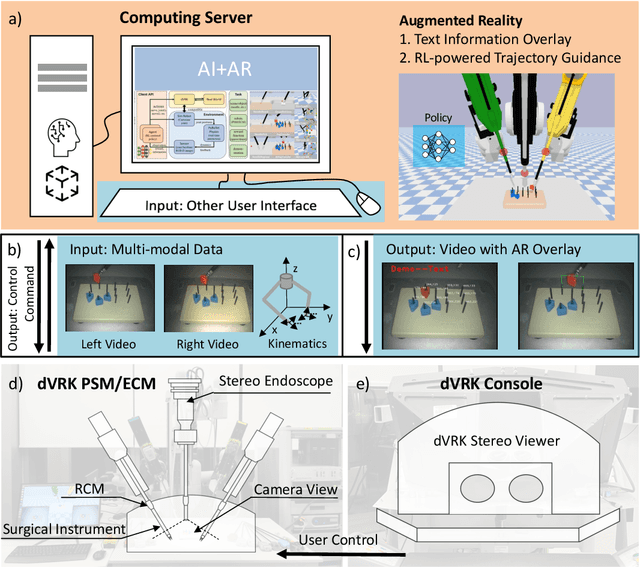
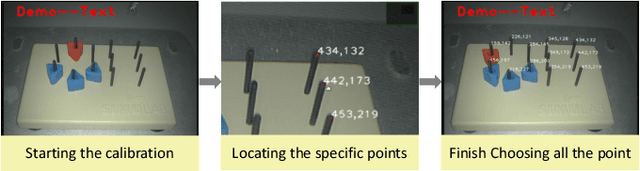
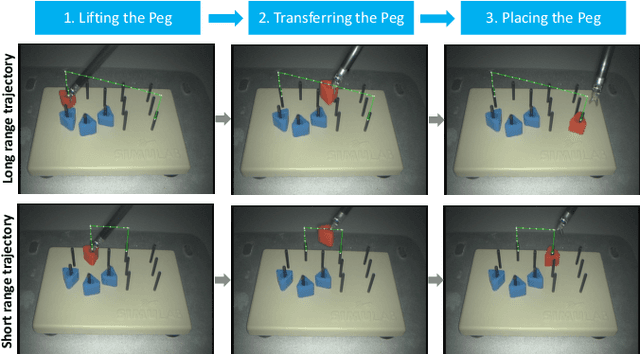
The demand of competent robot assisted surgeons is progressively expanding, because robot-assisted surgery has become progressively more popular due to its clinical advantages. To meet this demand and provide a better surgical education for surgeon, we develop a novel robotic surgery education system by integrating artificial intelligence surgical module and augmented reality visualization. The artificial intelligence incorporates reinforcement leaning to learn from expert demonstration and then generate 3D guidance trajectory, providing surgical context awareness of the complete surgical procedure. The trajectory information is further visualized in stereo viewer in the dVRK along with other information such as text hint, where the user can perceive the 3D guidance and learn the procedure. The proposed system is evaluated through a preliminary experiment on surgical education task peg-transfer, which proves its feasibility and potential as the next generation of robot-assisted surgery education solution.
Accelerating Surgical Robotics Research: Reviewing 10 Years of Research with the dVRK
May 13, 2021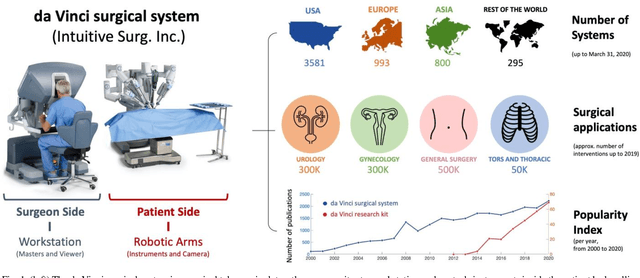
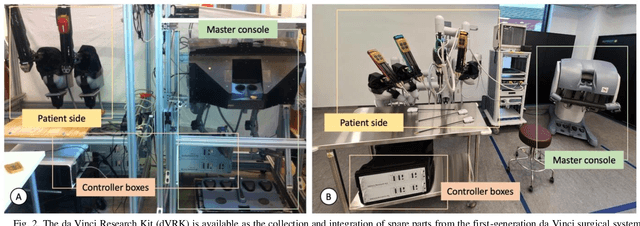
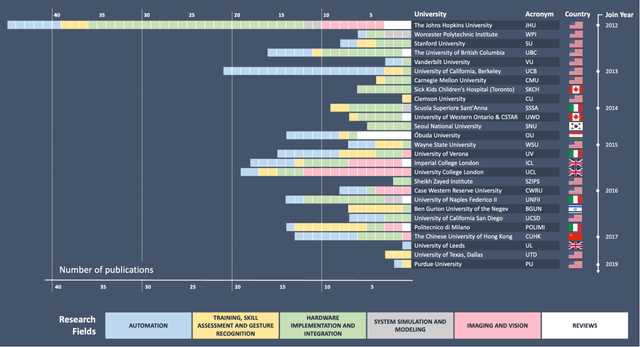
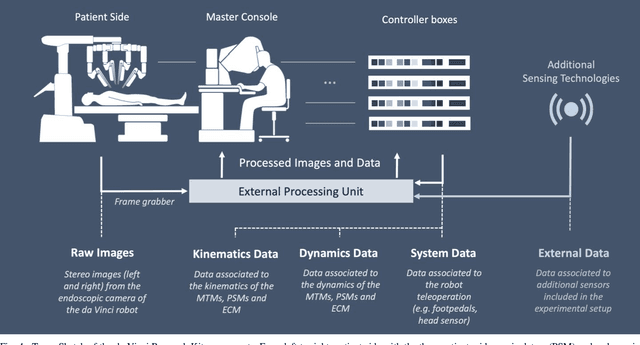
Robotic-assisted surgery is now well-established in clinical practice and has become the gold standard clinical treatment option for several clinical indications. The field of robotic-assisted surgery is expected to grow substantially in the next decade with a range of new robotic devices emerging to address unmet clinical needs across different specialities. A vibrant surgical robotics research community is pivotal for conceptualizing such new systems as well as for developing and training the engineers and scientists to translate them into practice. The da Vinci Research Kit (dVRK), an academic and industry collaborative effort to re-purpose decommissioned da Vinci surgical systems (Intuitive Surgical Inc, CA, USA) as a research platform for surgical robotics research, has been a key initiative for addressing a barrier to entry for new research groups in surgical robotics. In this paper, we present an extensive review of the publications that have been facilitated by the dVRK over the past decade. We classify research efforts into different categories and outline some of the major challenges and needs for the robotics community to maintain this initiative and build upon it.