 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-aware Self-supervised Learning for Cross-domain Technical Skill Assessment in Robot-assisted Surgery
Apr 28, 2023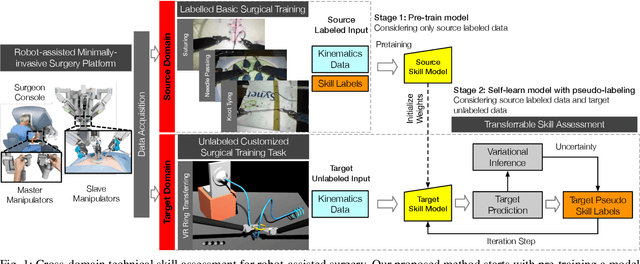
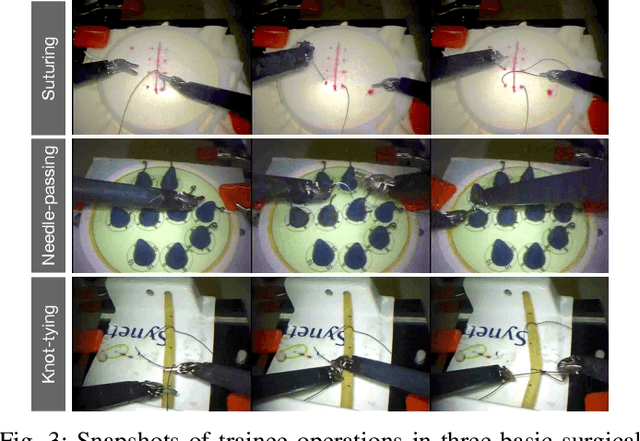
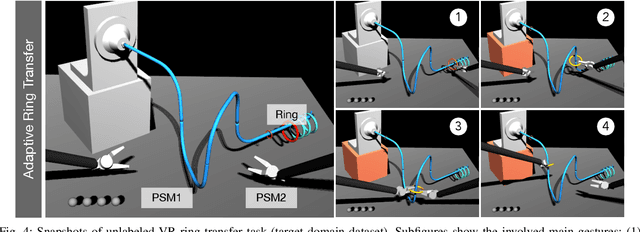
Objective technical skill assessment is crucial for effective training of new surgeons in robot-assisted surgery. With advancements in surgical training programs in both physical and virtual environments, it is imperative to develop generalizable methods for automatically assessing skills. In this paper, we propose a novel approach for skill assessment by transferring domain knowledge from labeled kinematic data to unlabeled data. Our approach leverages labeled data from common surgical training tasks such as Suturing, Needle Passing, and Knot Tying to jointly train a model with both labeled and unlabeled data. Pseudo labels are generated for the unlabeled data through an iterative manner that incorporates uncertainty estimation to ensure accurate labeling. We evaluate our method on a virtual reality simulated training task (Ring Transfer) using data from the da Vinci Research Kit (dVRK). The results show that trainees with robotic assistance have significantly higher expert probability compared to these without any assistance, p < 0.05, which aligns with previous studies showing the benefits of robotic assistance in improving training proficiency. Our method offers a significant advantage over other existing works as it does not require manual labeling or prior knowledge of the surgical training task for robot-assisted surgery.
Accelerating Surgical Robotics Research: Reviewing 10 Years of Research with the dVRK
May 13, 2021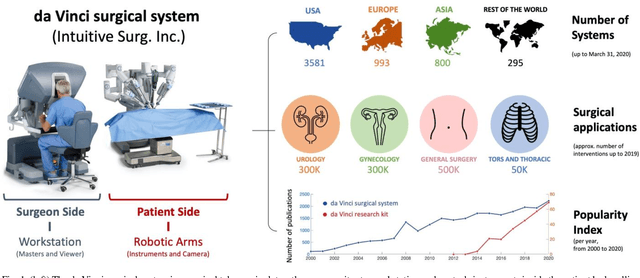
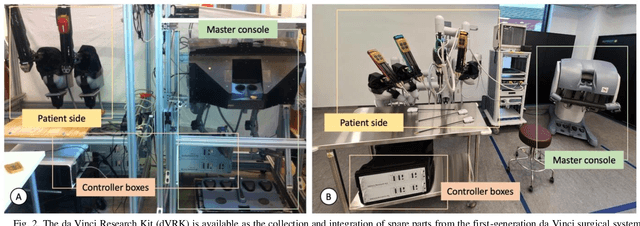
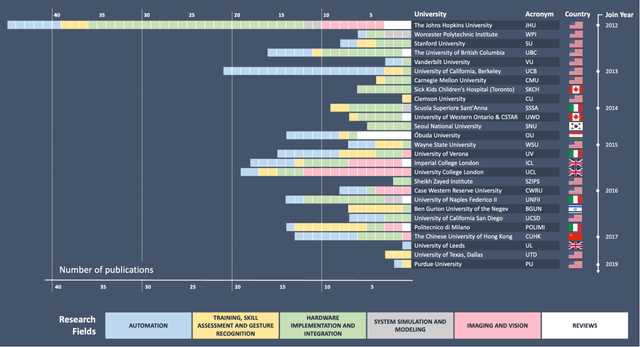
Robotic-assisted surgery is now well-established in clinical practice and has become the gold standard clinical treatment option for several clinical indications. The field of robotic-assisted surgery is expected to grow substantially in the next decade with a range of new robotic devices emerging to address unmet clinical needs across different specialities. A vibrant surgical robotics research community is pivotal for conceptualizing such new systems as well as for developing and training the engineers and scientists to translate them into practice. The da Vinci Research Kit (dVRK), an academic and industry collaborative effort to re-purpose decommissioned da Vinci surgical systems (Intuitive Surgical Inc, CA, USA) as a research platform for surgical robotics research, has been a key initiative for addressing a barrier to entry for new research groups in surgical robotics. In this paper, we present an extensive review of the publications that have been facilitated by the dVRK over the past decade. We classify research efforts into different categories and outline some of the major challenges and needs for the robotics community to maintain this initiative and build upon it.
A surgical dataset from the da Vinci Research Kit for task automation and recognition
Feb 06, 2021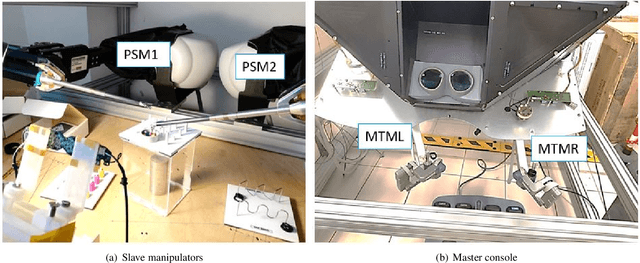
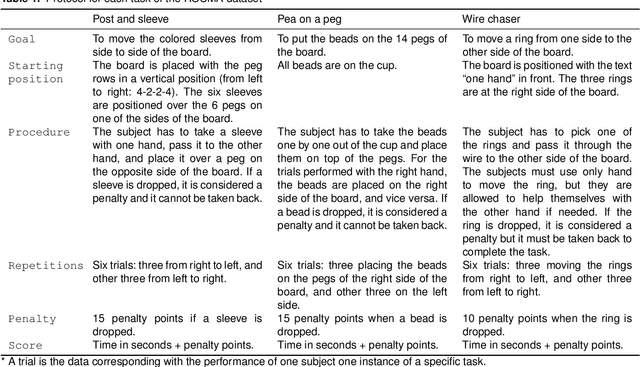
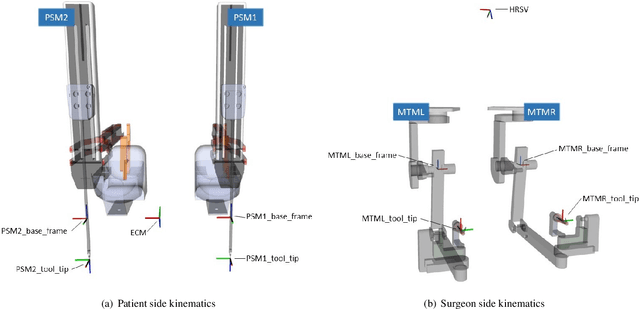

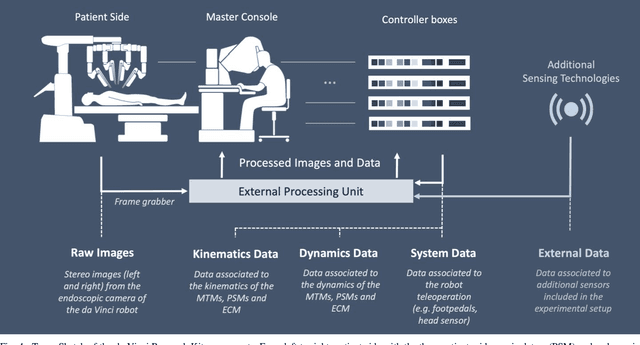
The use of datasets is getting more relevance in surgical robotics since they can be used to recognise and automate tasks. Also, this allows to use common datasets to compare different algorithms and methods. The objective of this work is to provide a complete dataset of three common training surgical tasks that surgeons perform to improve their skills. For this purpose, 12 subjects teleoperated the da Vinci Research Kit to perform these tasks. The obtained dataset includes all the kinematics and dynamics information provided by the da Vinci robot (both master and slave side) together with the associated video from the camera. All the information has been carefully timestamped and provided in a readable csv format. A MATLAB interface integrated with ROS for using and replicating the data is also provided.
Model Order Selection Based on Information Theoretic Criteria: Design of the Penalty
Oct 04, 2019
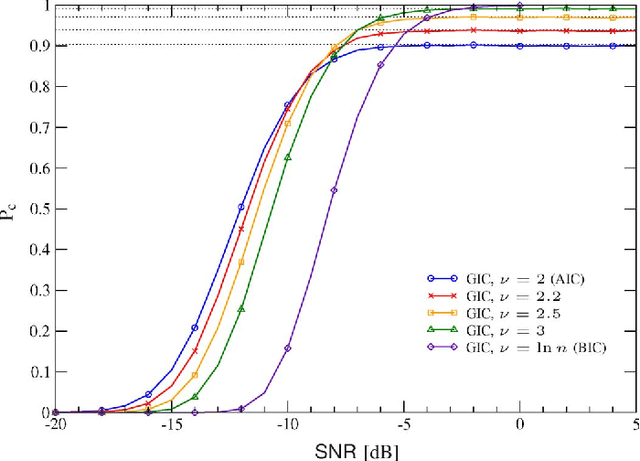
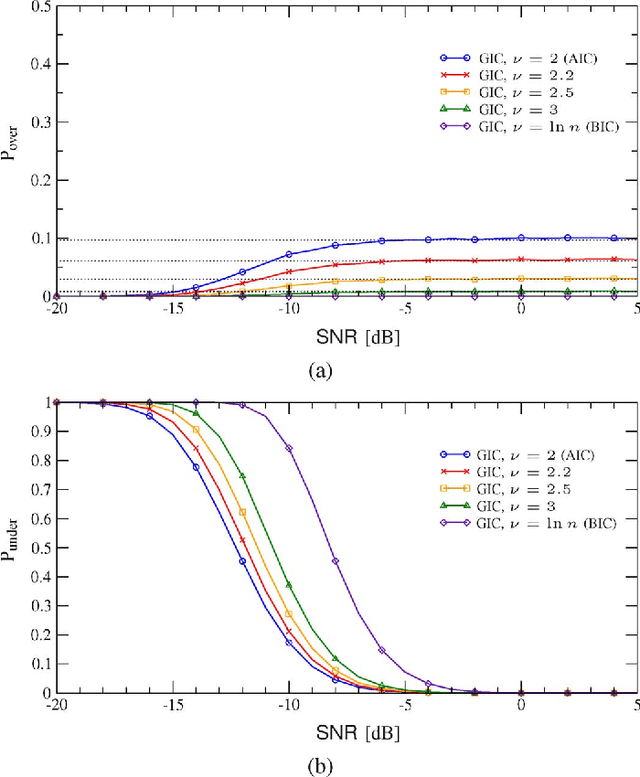
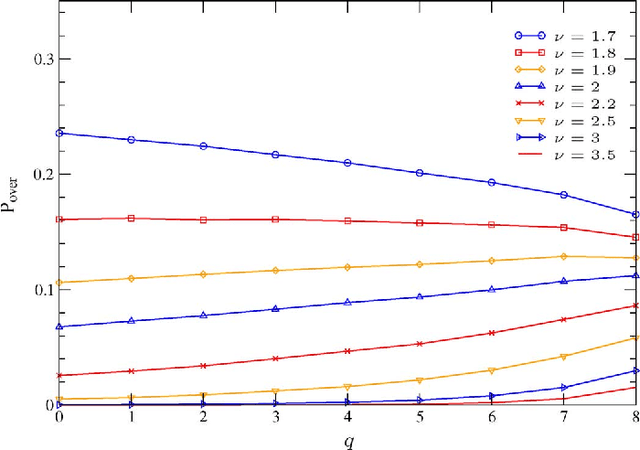
Information theoretic criteria (ITC) have been widely adopted in engineering and statistics for selecting, among an ordered set of candidate models, the one that better fits the observed sample data. The selected model minimizes a penalized likelihood metric, where the penalty is determined by the criterion adopted. While rules for choosing a penalty that guarantees a consistent estimate of the model order are known, theoretical tools for its design with finite samples have never been provided in a general setting. In this paper, we study model order selection for finite samples under a design perspective, focusing on the generalized information criterion (GIC), which embraces the most common ITC. The theory is general, and as case studies we consider: a) the problem of estimating the number of signals embedded in additive white Gaussian noise (AWGN) by using multiple sensors; b) model selection for the general linear model (GLM), which includes e.g. the problem of estimating the number of sinusoids in AWGN. The analysis reveals a trade-off between the probabilities of overestimating and underestimating the order of the model. We then propose to design the GIC penalty to minimize underestimation while keeping the overestimation probability below a specified level. For the considered problems, this method leads to analytical derivation of the optimal penalty for a given sample size. A performance comparison between the penalty optimized GIC and common AIC and BIC is provided, demonstrating the effectiveness of the proposed design strategy.
* 11 pages, 8 figures, journal