 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeeCo: Image Synthesis of Novel Instrument States Based on Dynamic and Deformable 3D Gaussian Reconstruction
Aug 11, 2025
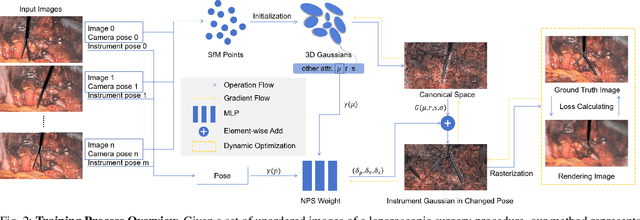

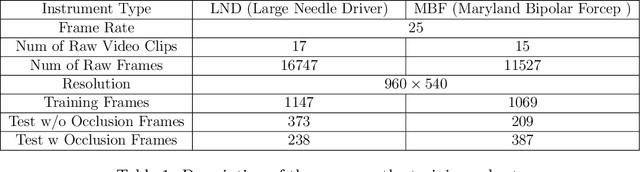
Computer vision-based technologies significantly enhance surgical automation by advancing tool tracking, detection, and localization. However, Current data-driven approaches are data-voracious, requiring large, high-quality labeled image datasets, which limits their application in surgical data science. Our Work introduces a novel dynamic Gaussian Splatting technique to address the data scarcity in surgical image datasets. We propose a dynamic Gaussian model to represent dynamic surgical scenes, enabling the rendering of surgical instruments from unseen viewpoints and deformations with real tissue backgrounds. We utilize a dynamic training adjustment strategy to address challenges posed by poorly calibrated camera poses from real-world scenarios. Additionally, we propose a method based on dynamic Gaussians for automatically generating annotations for our synthetic data. For evaluation, we constructed a new dataset featuring seven scenes with 14,000 frames of tool and camera motion and tool jaw articulation, with a background of an ex-vivo porcine model. Using this dataset, we synthetically replicate the scene deformation from the ground truth data, allowing direct comparisons of synthetic image quality. Experimental results illustrate that our method generates photo-realistic labeled image datasets with the highest values in Peak-Signal-to-Noise Ratio (29.87). We further evaluate the performance of medical-specific neural networks trained on real and synthetic images using an unseen real-world image dataset. Our results show that the performance of models trained on synthetic images generated by the proposed method outperforms those trained with state-of-the-art standard data augmentation by 10%, leading to an overall improvement in model performances by nearly 15%.
In vivo validation of Wireless Power Transfer System for Magnetically Controlled Robotic Capsule Endoscopy
Mar 17, 2025This paper presents the in vivo validation of an inductive wireless power transfer (WPT) system integrated for the first time into a magnetically controlled robotic capsule endoscopy platform. The proposed system enables continuous power delivery to the capsule without the need for onboard batteries, thus extending operational time and reducing size constraints. The WPT system operates through a resonant inductive coupling mechanism, based on a transmitting coil mounted on the end effector of a robotic arm that also houses an external permanent magnet and a localization coil for precise capsule manipulation. To ensure robust and stable power transmission in the presence of coil misalignment and rotation, a 3D receiving coil is integrated within the capsule. Additionally, a closed-loop adaptive control system, based on load-shift keying (LSK) modulation, dynamically adjusts the transmitted power to optimize efficiency while maintaining compliance with specific absorption rate (SAR) safety limits. The system has been extensively characterized in laboratory settings and validated through in vivo experiments using a porcine model, demonstrating reliable power transfer and effective robotic navigation in realistic gastrointestinal conditions: the average received power was 110 mW at a distance of 9 cm between the coils, with variable capsule rotation angles. The results confirm the feasibility of the proposed WPT approach for autonomous, battery-free robotic capsule endoscopy, paving the way for enhanced diagnostic in gastrointestinal medicine.
SurgRIPE challenge: Benchmark of Surgical Robot Instrument Pose Estimation
Jan 06, 2025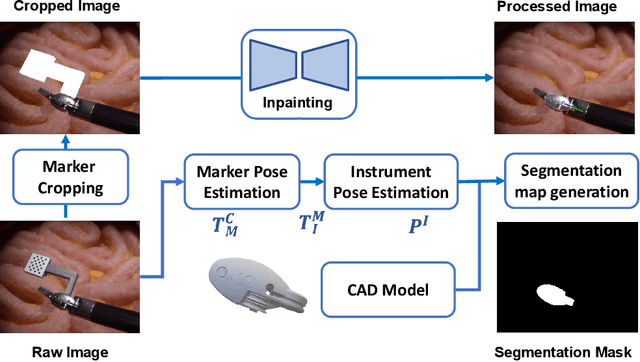

Accurate instrument pose estimation is a crucial step towards the future of robotic surgery, enabling applications such as autonomous surgical task execution. Vision-based methods for surgical instrument pose estimation provide a practical approach to tool tracking, but they often require markers to be attached to the instruments. Recently, more research has focused on the development of marker-less methods based on deep learning. However, acquiring realistic surgical data, with ground truth instrument poses, required for deep learning training, is challenging. To address the issues in surgical instrument pose estimation, we introduce the Surgical Robot Instrument Pose Estimation (SurgRIPE) challenge, hosted at the 26th International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI) in 2023. The objectives of this challenge are: (1) to provide the surgical vision community with realistic surgical video data paired with ground truth instrument poses, and (2) to establish a benchmark for evaluating markerless pose estimation methods. The challenge led to the development of several novel algorithms that showcased improved accuracy and robustness over existing methods. The performance evaluation study on the SurgRIPE dataset highlights the potential of these advanced algorithms to be integrated into robotic surgery systems, paving the way for more precise and autonomous surgical procedures. The SurgRIPE challenge has successfully established a new benchmark for the field, encouraging further research and development in surgical robot instrument pose estimation.
External Steering of Vine Robots via Magnetic Actuation
Sep 02, 2024This paper explores the concept of external magnetic control for vine robots to enable their high curvature steering and navigation for use in endoluminal applications. Vine robots, inspired by natural growth and locomotion strategies, present unique shape adaptation capabilities that allow passive deformation around obstacles. However, without additional steering mechanisms, they lack the ability to actively select the desired direction of growth. The principles of magnetically steered growing robots are discussed, and experimental results showcase the effectiveness of the proposed magnetic actuation approach. We present a 25 mm diameter vine robot with integrated magnetic tip capsule, including 6 Degrees of Freedom (DOF) localization and camera and demonstrate a minimum bending radius of 3.85 cm with an internal pressure of 30 kPa. Furthermore, we evaluate the robot's ability to form tight curvature through complex navigation tasks, with magnetic actuation allowing for extended free-space navigation without buckling. The suspension of the magnetic tip was also validated using the 6 DOF localization system to ensure that the shear-free nature of vine robots was preserved. Additionally, by exploiting the magnetic wrench at the tip, we showcase preliminary results of vine retraction. The findings contribute to the development of controllable vine robots for endoluminal applications, providing high tip force and shear-free navigation.
Realistic Surgical Image Dataset Generation Based On 3D Gaussian Splatting
Jul 20, 2024



Computer vision technologies markedly enhance the automation capabilities of robotic-assisted minimally invasive surgery (RAMIS) through advanced tool tracking, detection, and localization. However, the limited availability of comprehensive surgical datasets for training represents a significant challenge in this field. This research introduces a novel method that employs 3D Gaussian Splatting to generate synthetic surgical datasets. We propose a method for extracting and combining 3D Gaussian representations of surgical instruments and background operating environments, transforming and combining them to generate high-fidelity synthetic surgical scenarios. We developed a data recording system capable of acquiring images alongside tool and camera poses in a surgical scene. Using this pose data, we synthetically replicate the scene, thereby enabling direct comparisons of the synthetic image quality (29.592 PSNR). As a further validation, we compared two YOLOv5 models trained on the synthetic and real data, respectively, and assessed their performance in an unseen real-world test dataset. Comparing the performances, we observe an improvement in neural network performance, with the synthetic-trained model outperforming the real-world trained model by 12%, testing both on real-world data.
* This paper has already been accepted by INTERNATIONAL CONFERENCE ON MEDICAL IMAGE COMPUTING AND COMPUTER ASSISTED INTERVENTION (MICCAI 2024)
Computational Design of Magnetic Soft Shape-Forming Catheters using the Material Point Method
Oct 30, 2023Magnetic Soft Catheters (MSCs) are capable of miniaturization due to the use of an external magnetic field for actuation. Through careful design of the magnetic elements within the MSC and the external magnetic field, the shape along the full length of the catheter can be precisely controlled. However, modeling of the magnetic-soft material is challenging due to the complex relationship between magnetic and elastic stresses within the material. Approaches based on traditional Finite Element Methods (FEM) lead to high computation time and rely on proprietary implementations. In this work, we showcase the use of our recently presented open-source simulation framework based on the Material Point Method (MPM) for the computational design of magnetic soft catheters to realize arbitrary shapes in 3D, and to facilitate follow-the-leader shape-forming insertion.
* 3 pages, 2 figures
Six-degree-of-freedom Localization Under Multiple Permanent Magnets Actuation
Mar 20, 2023Localization of magnetically actuated medical robots is essential for accurate actuation, closed loop control and delivery of functionality. Despite extensive progress in the use of magnetic field and inertial measurements for pose estimation, these have been either under single external permanent magnet actuation or coil systems. With the advent of new magnetic actuation systems comprised of multiple external permanent magnets for increased control and manipulability, new localization techniques are necessary to account for and leverage the additional magnetic field sources. In this letter, we introduce a novel magnetic localization technique in the Special Euclidean Group SE(3) for multiple external permanent magnetic field actuation and control systems. The method relies on a milli-meter scale three-dimensional accelerometer and a three-dimensional magnetic field sensor and is able to estimate the full 6 degree-of-freedom pose without any prior pose information. We demonstrated the localization system with two external permanent magnets and achieved localization errors of 8.5 ? 2.4 mm in position norm and 3.7 ? 3.6? in orientation, across a cubic workspace with 20 cm length.
Independent Control of Two Magnetic Robots using External Permanent Magnets: A Feasibility Study
Mar 03, 2023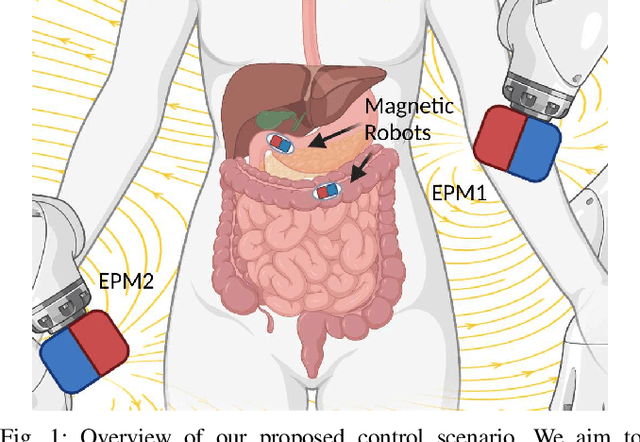
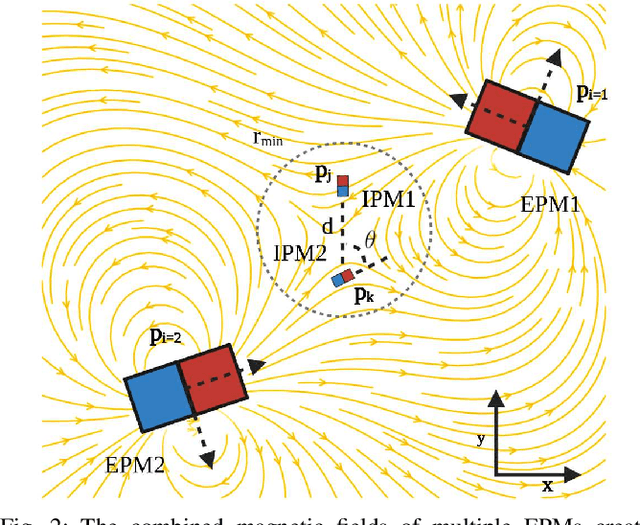
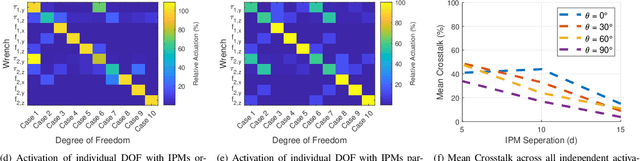
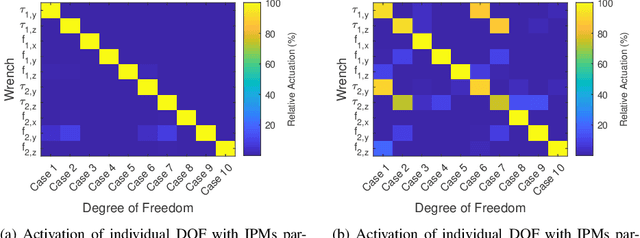
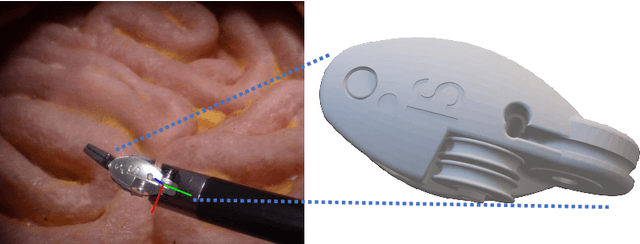
The ability to have multiple magnetic robots operate independently in the same workspace would increase the clinical potential of these systems allowing collaborative operation. In this work, we investigate the feasibility of actuating two magnetic robots operating within the same workspace using external permanent magnets. Unlike actuation systems based on pairs of electromagnetic coils, the use of multiple permanent magnets comes with the advantage of a large workspace which better suits the clinical setting. In this work, we present an optimization routine capable of generating the required poses for the external magnets in order to control the position and orientation of two magnetic robots. We show that at a distance of 15cm, minimal coupling between the magnetic robots can be achieved (3.9\% crosstalk) each embedded with 5mm diameter, 5mm length NdFeB magnets. At smaller distances, we observe that the ability to independently control the robot torques decreases, but forces can still achieve independent control even with alignment of the robots. We test our developed control system in a simulation of two magnetic robots following pre-planned trajectories in close proximity (60 mm) showing a mean positional error of 8.7 mm and mean angular error of 16.7 degrees.
Accelerating Surgical Robotics Research: Reviewing 10 Years of Research with the dVRK
May 13, 2021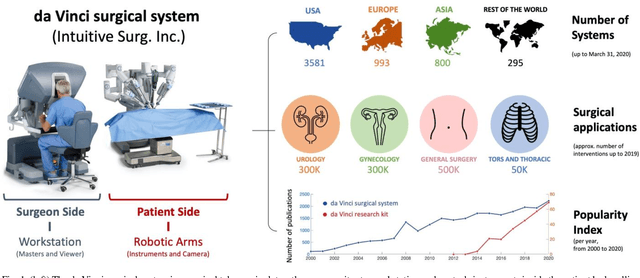
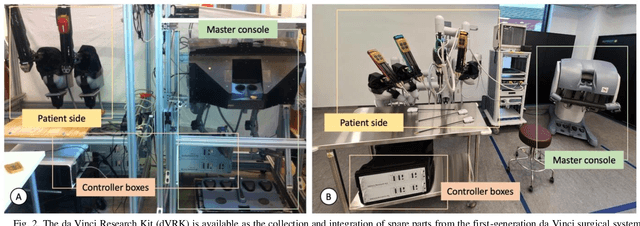
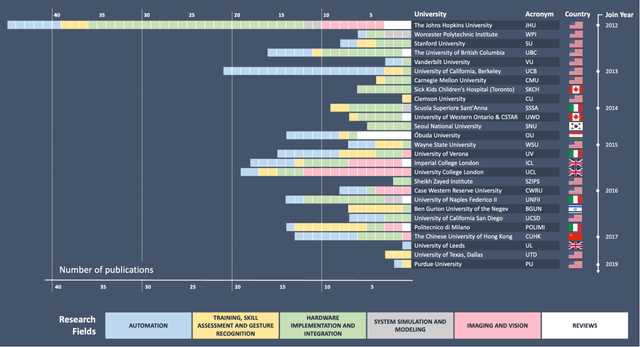
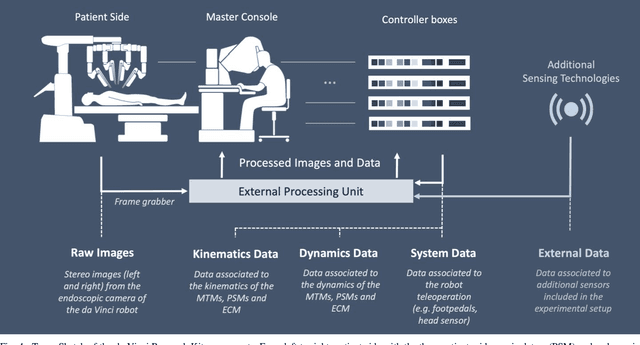
Robotic-assisted surgery is now well-established in clinical practice and has become the gold standard clinical treatment option for several clinical indications. The field of robotic-assisted surgery is expected to grow substantially in the next decade with a range of new robotic devices emerging to address unmet clinical needs across different specialities. A vibrant surgical robotics research community is pivotal for conceptualizing such new systems as well as for developing and training the engineers and scientists to translate them into practice. The da Vinci Research Kit (dVRK), an academic and industry collaborative effort to re-purpose decommissioned da Vinci surgical systems (Intuitive Surgical Inc, CA, USA) as a research platform for surgical robotics research, has been a key initiative for addressing a barrier to entry for new research groups in surgical robotics. In this paper, we present an extensive review of the publications that have been facilitated by the dVRK over the past decade. We classify research efforts into different categories and outline some of the major challenges and needs for the robotics community to maintain this initiative and build upon it.