 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgRIPE challenge: Benchmark of Surgical Robot Instrument Pose Estimation
Jan 06, 2025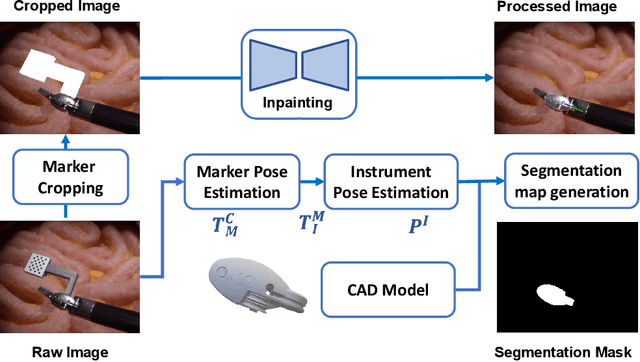
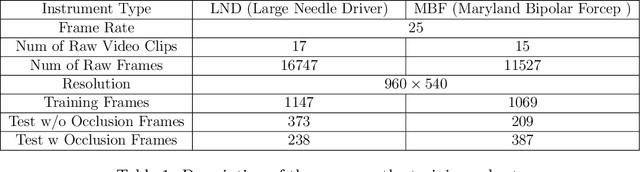

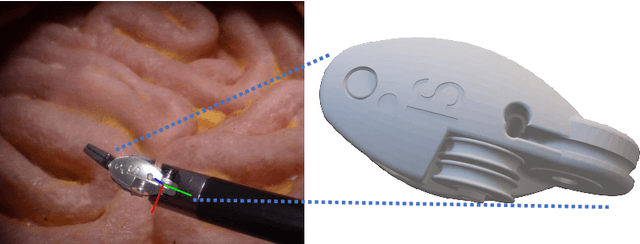
Accurate instrument pose estimation is a crucial step towards the future of robotic surgery, enabling applications such as autonomous surgical task execution. Vision-based methods for surgical instrument pose estimation provide a practical approach to tool tracking, but they often require markers to be attached to the instruments. Recently, more research has focused on the development of marker-less methods based on deep learning. However, acquiring realistic surgical data, with ground truth instrument poses, required for deep learning training, is challenging. To address the issues in surgical instrument pose estimation, we introduce the Surgical Robot Instrument Pose Estimation (SurgRIPE) challenge, hosted at the 26th International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI) in 2023. The objectives of this challenge are: (1) to provide the surgical vision community with realistic surgical video data paired with ground truth instrument poses, and (2) to establish a benchmark for evaluating markerless pose estimation methods. The challenge led to the development of several novel algorithms that showcased improved accuracy and robustness over existing methods. The performance evaluation study on the SurgRIPE dataset highlights the potential of these advanced algorithms to be integrated into robotic surgery systems, paving the way for more precise and autonomous surgical procedures. The SurgRIPE challenge has successfully established a new benchmark for the field, encouraging further research and development in surgical robot instrument pose estimation.
EndoDepthL: Lightweight Endoscopic Monocular Depth Estimation with CNN-Transformer
Aug 16, 2023In this study, we address the key challenges concerning the accuracy and effectiveness of depth estimation for endoscopic imaging, with a particular emphasis on real-time inference and the impact of light reflections. We propose a novel lightweight solution named EndoDepthL that integrates Convolutional Neural Networks (CNN) and Transformers to predict multi-scale depth maps. Our approach includes optimizing the network architecture, incorporating multi-scale dilated convolution, and a multi-channel attention mechanism. We also introduce a statistical confidence boundary mask to minimize the impact of reflective areas. To better evaluate the performance of monocular depth estimation in endoscopic imaging, we propose a novel complexity evaluation metric that considers network parameter size, floating-point operations, and inference frames per second. We comprehensively evaluate our proposed method and compare it with existing baseline solutions. The results demonstrate that EndoDepthL ensures depth estimation accuracy with a lightweight structure.