 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Anatomy-specific Guidewire Shaping Robot for Improved Vascular Navigation
Feb 03, 2026Neuroendovascular access often relies on passive microwires that are hand-shaped at the back table and then used to track a microcatheter to the target. Neuroendovascular surgeons determine the shape of the wire by examining the patient pre-operative images and using their experience to identify anatomy specific shapes of the wire that would facilitate reaching the target. This procedure is particularly complex in convoluted anatomical structures and is heavily dependent on the level of expertise of the surgeon. Towards enabling standardized autonomous shaping, we present a bench-top guidewire shaping robot capable of producing navigation-specific desired wire configurations. We present a model that can map the desired wire shape into robot actions, calibrated using experimental data. We show that the robot can produce clinically common tip geometries (C, S, Angled, Hook) and validate them with respect to the model-predicted shapes in 2D. Our model predicts the shape with a Root Mean Square (RMS) error of 0.56mm across all shapes when compared to the experimental results. We also demonstrate 3D tip shaping capabilities and the ability to traverse complex endoluminal navigation from the petrous Internal Carotid Artery (ICA) to the Posterior Communicating Artery (PComm).
Contact-aware Path Planning for Autonomous Neuroendovascular Navigation
Jan 12, 2026We propose a deterministic and time-efficient contact-aware path planner for neurovascular navigation. The algorithm leverages information from pre- and intra-operative images of the vessels to navigate pre-bent passive tools, by intelligently predicting and exploiting interactions with the anatomy. A kinematic model is derived and employed by the sampling-based planner for tree expansion that utilizes simplified motion primitives. This approach enables fast computation of the feasible path, with negligible loss in accuracy, as demonstrated in diverse and representative anatomies of the vessels. In these anatomical demonstrators, the algorithm shows a 100% convergence rate within 22.8s in the worst case, with sub-millimeter tracking errors (less than 0.64 mm), and is found effective on anatomical phantoms representative of around 94% of patients.
Towards Autonomous Navigation of Neuroendovascular Tools for Timely Stroke Treatment via Contact-aware Path Planning
Feb 21, 2025In this paper, we propose a model-based contact-aware motion planner for autonomous navigation of neuroendovascular tools in acute ischemic stroke. The planner is designed to find the optimal control strategy for telescopic pre-bent catheterization tools such as guidewire and catheters, currently used for neuroendovascular procedures. A kinematic model for the telescoping tools and their interaction with the surrounding anatomy is derived to predict tools steering. By leveraging geometrical knowledge of the anatomy, obtained from pre-operative segmented 3D images, and the mechanics of the telescoping tools, the planner finds paths to the target enabled by interacting with the surroundings. We propose an actuation platform for insertion and rotation of the telescopic tools and present experimental results for the navigation from the base of the descending aorta to the LCCA. We demonstrate that, by leveraging the pre-operative plan, we can consistently navigate the LCCA with 100% success of over 50 independent trials. We also study the robustness of the planner towards motion of the aorta and errors in the initial positioning of the robotic tools. The proposed plan can successfully reach the LCCA for rotations of the aorta of up to 10{\deg}, and displacement of up to 10mm, on the coronal plane.
Continuum Robot Shape Estimation Using Magnetic Ball Chains
Oct 21, 2024Shape sensing of medical continuum robots is important both for closed-loop control as well as for enabling the clinician to visualize the robot inside the body. There is a need for inexpensive, but accurate shape sensing technologies. This paper proposes the use of magnetic ball chains as a means of generating shape-specific magnetic fields that can be detected by an external array of Hall effect sensors. Such a ball chain, encased in a flexible polymer sleeve, could be inserted inside the lumen of any continuum robot to provide real-time shape feedback. The sleeve could be removed, as needed, during the procedure to enable use of the entire lumen. To investigate this approach, a shape-sensing model for a steerable catheter tip is derived and an observability and sensitivity analysis are presented. Experiments show maximum estimation errors of 7.1% and mean of 2.9% of the tip position with respect to total length.
Magnetic Ball Chain Robots for Cardiac Arrhythmia Treatment
Oct 21, 2024This paper introduces a novel magnetic navigation system for cardiac ablation. The system is formed from two key elements: a magnetic ablation catheter consisting of a chain of spherical permanent magnets; and an actuation system comprised of two cart-mounted permanent magnets undergoing pure rotation. The catheter design enables a large magnetic content with the goal of minimizing the footprint of the actuation system for easier integration with the clinical workflow. We present a quasi-static model of the catheter, the design of the actuation units, and their control modalities. Experimental validation shows that we can use small rotating magnets (119mm diameter) to reach cardiac ablation targets while generating clinically-relevant forces. Catheter control using a joystick is compared with manual catheter control. blue While total task completion time is similar, smoother navigation is observed using the proposed robotic system. We also demonstrate that the ball chain can ablate heart tissue and generate lesions comparable to the current clinical ablation catheters.
Using Neural Networks to Model Hysteretic Kinematics in Tendon-Actuated Continuum Robots
Apr 10, 2024The ability to accurately model mechanical hysteretic behavior in tendon-actuated continuum robots using deep learning approaches is a growing area of interest. In this paper, we investigate the hysteretic response of two types of tendon-actuated continuum robots and, ultimately, compare three types of neural network modeling approaches with both forward and inverse kinematic mappings: feedforward neural network (FNN), FNN with a history input buffer, and long short-term memory (LSTM) network. We seek to determine which model best captures temporal dependent behavior. We find that, depending on the robot's design, choosing different kinematic inputs can alter whether hysteresis is exhibited by the system. Furthermore, we present the results of the model fittings, revealing that, in contrast to the standard FNN, both FNN with a history input buffer and the LSTM model exhibit the capacity to model historical dependence with comparable performance in capturing rate-dependent hysteresis.
Hybrid Tendon and Ball Chain Continuum Robots for Enhanced Dexterity in Medical Interventions
Jan 30, 2024A hybrid continuum robot design is introduced that combines a proximal tendon-actuated section with a distal telescoping section comprised of permanent-magnet spheres actuated using an external magnet. While, individually, each section can approach a point in its workspace from one or at most several orientations, the two-section combination possesses a dexterous workspace. The paper describes kinematic modeling of the hybrid design and provides a description of the dexterous workspace. We present experimental validation which shows that a simplified kinematic model produces tip position mean and maximum errors of 3% and 7% of total robot length, respectively.
Six-degree-of-freedom Localization Under Multiple Permanent Magnets Actuation
Mar 20, 2023Localization of magnetically actuated medical robots is essential for accurate actuation, closed loop control and delivery of functionality. Despite extensive progress in the use of magnetic field and inertial measurements for pose estimation, these have been either under single external permanent magnet actuation or coil systems. With the advent of new magnetic actuation systems comprised of multiple external permanent magnets for increased control and manipulability, new localization techniques are necessary to account for and leverage the additional magnetic field sources. In this letter, we introduce a novel magnetic localization technique in the Special Euclidean Group SE(3) for multiple external permanent magnetic field actuation and control systems. The method relies on a milli-meter scale three-dimensional accelerometer and a three-dimensional magnetic field sensor and is able to estimate the full 6 degree-of-freedom pose without any prior pose information. We demonstrated the localization system with two external permanent magnets and achieved localization errors of 8.5 ? 2.4 mm in position norm and 3.7 ? 3.6? in orientation, across a cubic workspace with 20 cm length.
Independent Control of Two Magnetic Robots using External Permanent Magnets: A Feasibility Study
Mar 03, 2023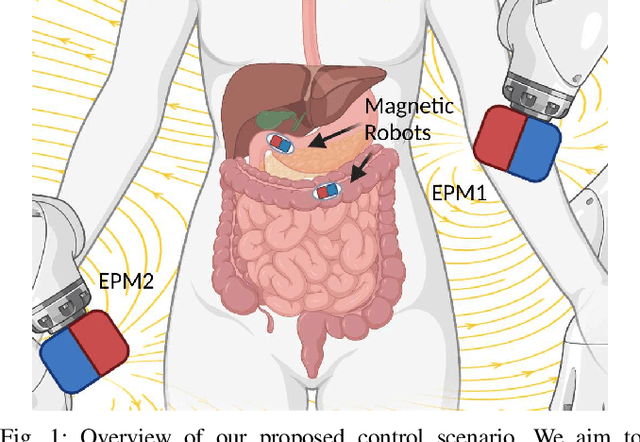
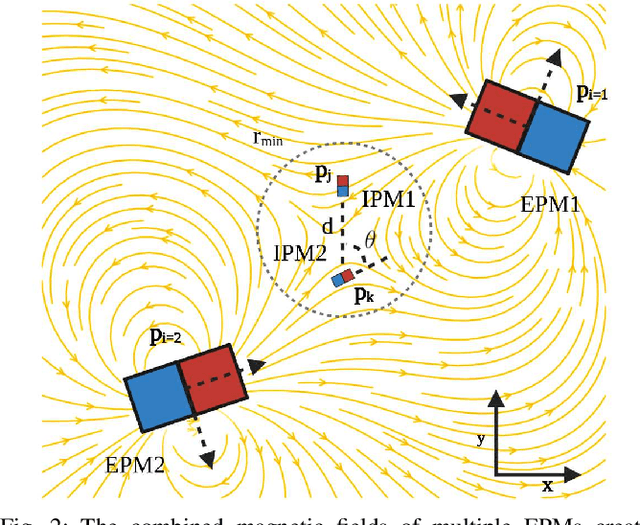
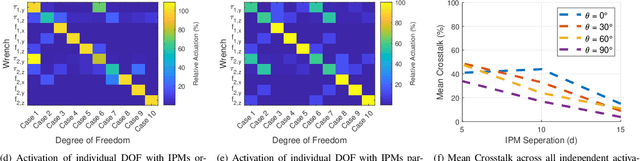
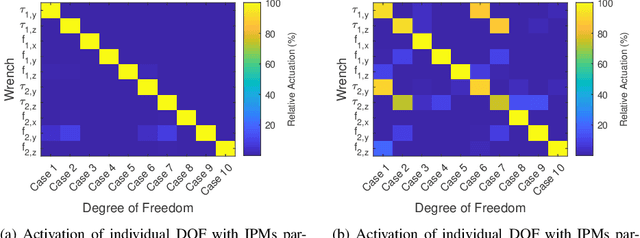
The ability to have multiple magnetic robots operate independently in the same workspace would increase the clinical potential of these systems allowing collaborative operation. In this work, we investigate the feasibility of actuating two magnetic robots operating within the same workspace using external permanent magnets. Unlike actuation systems based on pairs of electromagnetic coils, the use of multiple permanent magnets comes with the advantage of a large workspace which better suits the clinical setting. In this work, we present an optimization routine capable of generating the required poses for the external magnets in order to control the position and orientation of two magnetic robots. We show that at a distance of 15cm, minimal coupling between the magnetic robots can be achieved (3.9\% crosstalk) each embedded with 5mm diameter, 5mm length NdFeB magnets. At smaller distances, we observe that the ability to independently control the robot torques decreases, but forces can still achieve independent control even with alignment of the robots. We test our developed control system in a simulation of two magnetic robots following pre-planned trajectories in close proximity (60 mm) showing a mean positional error of 8.7 mm and mean angular error of 16.7 degrees.
Magnetic Ball Chain Robots for Endoluminal Interventions
Feb 07, 2023
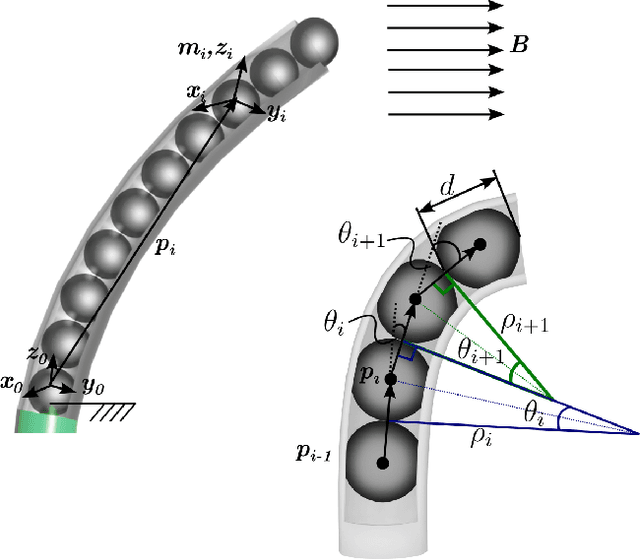


This paper introduces a novel class of hyperredundant robots comprised of chains of permanently magnetized spheres enclosed in a cylindrical polymer skin. With their shape controlled using an externally-applied magnetic field, the spherical joints of these robots enable them to bend to very small radii of curvature. These robots can be used as steerable tips for endoluminal instruments. A kinematic model is derived based on minimizing magnetic and elastic potential energy. Simulation is used to demonstrate the enhanced steerability of these robots in comparison to magnetic soft continuum robots designed using either distributed or lumped magnetic material. Experiments are included to validate the model and to demonstrate the steering capability of ball chain robots in bifurcating channels.