 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal Steering of Vine Robots via Magnetic Actuation
Sep 02, 2024This paper explores the concept of external magnetic control for vine robots to enable their high curvature steering and navigation for use in endoluminal applications. Vine robots, inspired by natural growth and locomotion strategies, present unique shape adaptation capabilities that allow passive deformation around obstacles. However, without additional steering mechanisms, they lack the ability to actively select the desired direction of growth. The principles of magnetically steered growing robots are discussed, and experimental results showcase the effectiveness of the proposed magnetic actuation approach. We present a 25 mm diameter vine robot with integrated magnetic tip capsule, including 6 Degrees of Freedom (DOF) localization and camera and demonstrate a minimum bending radius of 3.85 cm with an internal pressure of 30 kPa. Furthermore, we evaluate the robot's ability to form tight curvature through complex navigation tasks, with magnetic actuation allowing for extended free-space navigation without buckling. The suspension of the magnetic tip was also validated using the 6 DOF localization system to ensure that the shear-free nature of vine robots was preserved. Additionally, by exploiting the magnetic wrench at the tip, we showcase preliminary results of vine retraction. The findings contribute to the development of controllable vine robots for endoluminal applications, providing high tip force and shear-free navigation.
Computational Design of Magnetic Soft Shape-Forming Catheters using the Material Point Method
Oct 30, 2023Magnetic Soft Catheters (MSCs) are capable of miniaturization due to the use of an external magnetic field for actuation. Through careful design of the magnetic elements within the MSC and the external magnetic field, the shape along the full length of the catheter can be precisely controlled. However, modeling of the magnetic-soft material is challenging due to the complex relationship between magnetic and elastic stresses within the material. Approaches based on traditional Finite Element Methods (FEM) lead to high computation time and rely on proprietary implementations. In this work, we showcase the use of our recently presented open-source simulation framework based on the Material Point Method (MPM) for the computational design of magnetic soft catheters to realize arbitrary shapes in 3D, and to facilitate follow-the-leader shape-forming insertion.
* 3 pages, 2 figures
Independent Control of Two Magnetic Robots using External Permanent Magnets: A Feasibility Study
Mar 03, 2023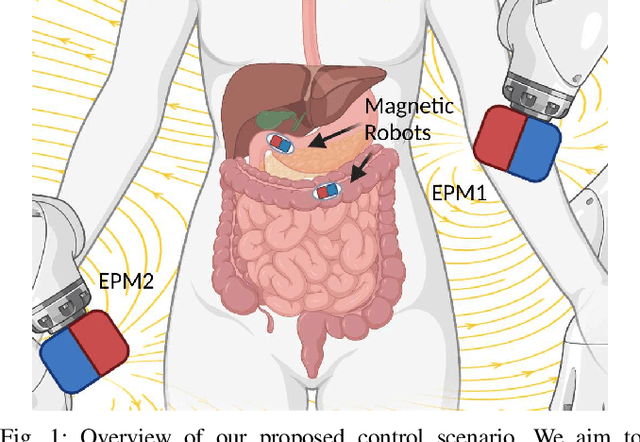
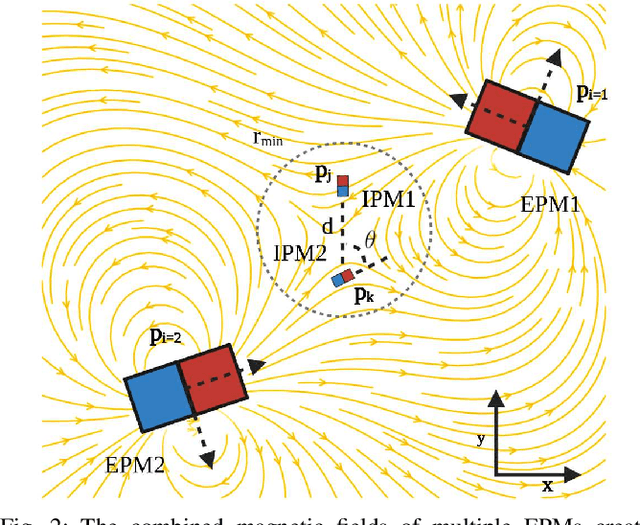
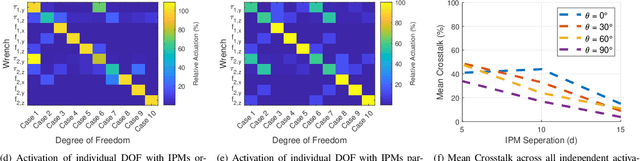
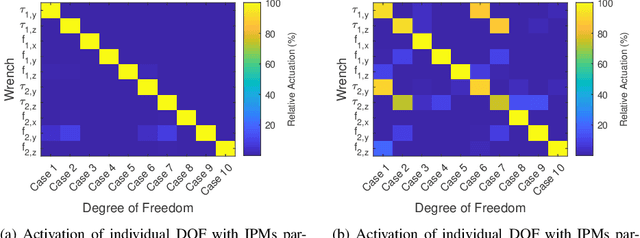
The ability to have multiple magnetic robots operate independently in the same workspace would increase the clinical potential of these systems allowing collaborative operation. In this work, we investigate the feasibility of actuating two magnetic robots operating within the same workspace using external permanent magnets. Unlike actuation systems based on pairs of electromagnetic coils, the use of multiple permanent magnets comes with the advantage of a large workspace which better suits the clinical setting. In this work, we present an optimization routine capable of generating the required poses for the external magnets in order to control the position and orientation of two magnetic robots. We show that at a distance of 15cm, minimal coupling between the magnetic robots can be achieved (3.9\% crosstalk) each embedded with 5mm diameter, 5mm length NdFeB magnets. At smaller distances, we observe that the ability to independently control the robot torques decreases, but forces can still achieve independent control even with alignment of the robots. We test our developed control system in a simulation of two magnetic robots following pre-planned trajectories in close proximity (60 mm) showing a mean positional error of 8.7 mm and mean angular error of 16.7 degrees.