 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnetic Ball Chain Robots for Cardiac Arrhythmia Treatment
Oct 21, 2024This paper introduces a novel magnetic navigation system for cardiac ablation. The system is formed from two key elements: a magnetic ablation catheter consisting of a chain of spherical permanent magnets; and an actuation system comprised of two cart-mounted permanent magnets undergoing pure rotation. The catheter design enables a large magnetic content with the goal of minimizing the footprint of the actuation system for easier integration with the clinical workflow. We present a quasi-static model of the catheter, the design of the actuation units, and their control modalities. Experimental validation shows that we can use small rotating magnets (119mm diameter) to reach cardiac ablation targets while generating clinically-relevant forces. Catheter control using a joystick is compared with manual catheter control. blue While total task completion time is similar, smoother navigation is observed using the proposed robotic system. We also demonstrate that the ball chain can ablate heart tissue and generate lesions comparable to the current clinical ablation catheters.
Hybrid Tendon and Ball Chain Continuum Robots for Enhanced Dexterity in Medical Interventions
Jan 30, 2024A hybrid continuum robot design is introduced that combines a proximal tendon-actuated section with a distal telescoping section comprised of permanent-magnet spheres actuated using an external magnet. While, individually, each section can approach a point in its workspace from one or at most several orientations, the two-section combination possesses a dexterous workspace. The paper describes kinematic modeling of the hybrid design and provides a description of the dexterous workspace. We present experimental validation which shows that a simplified kinematic model produces tip position mean and maximum errors of 3% and 7% of total robot length, respectively.
Magnetic Ball Chain Robots for Endoluminal Interventions
Feb 07, 2023
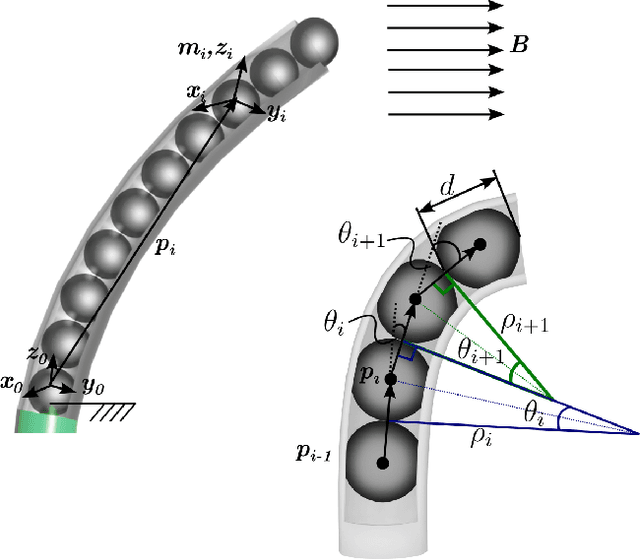


This paper introduces a novel class of hyperredundant robots comprised of chains of permanently magnetized spheres enclosed in a cylindrical polymer skin. With their shape controlled using an externally-applied magnetic field, the spherical joints of these robots enable them to bend to very small radii of curvature. These robots can be used as steerable tips for endoluminal instruments. A kinematic model is derived based on minimizing magnetic and elastic potential energy. Simulation is used to demonstrate the enhanced steerability of these robots in comparison to magnetic soft continuum robots designed using either distributed or lumped magnetic material. Experiments are included to validate the model and to demonstrate the steering capability of ball chain robots in bifurcating channels.