 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Effect of a Series Elastic Actuation Retrofit to Black-Box Actuators
May 22, 2026In robotic applications, actuators are typically designed to be stiff with minimal backlash to ensure precision and repeatability. However, this limits compliance, leading to potential damage and poor force control in uncertain environments. Series Elastic Actuation (SEA) introduces compliance to enhance disturbance rejection and enable force measurement via Hooke's Law but reduces system bandwidth. A custom Series Elastic (SE) element was retrofitted to a black-box actuator to mitigate non-linearities like backlash and static friction. Integrating the SE element enabled high-fidelity force measurements, improving force control bandwidth and performance. A torsional SE element was designed through Finite Element (FE) analysis, yielding a stiffness of 2155.4 Nm/rad. Open-loop force control bandwidth was measured for the original motor and the SEA-integrated configuration, while closed-loop bandwidth was assessed using feedback from the SEA and a commercial force sensor. The SEA module increased bandwidth from 10.32 Hz to 30.32 Hz, a 2.93X improvement. Additionally, it outperformed the commercial sensor by 7.63% despite costing 25 GBP, a fraction of the price.
Open-H-Embodiment: A Large-Scale Dataset for Enabling Foundation Models in Medical Robotics
Apr 22, 2026Autonomous medical robots hold promise to improve patient outcomes, reduce provider workload, democratize access to care, and enable superhuman precision. However, autonomous medical robotics has been limited by a fundamental data problem: existing medical robotic datasets are small, single-embodiment, and rarely shared openly, restricting the development of foundation models that the field needs to advance. We introduce Open-H-Embodiment, the largest open dataset of medical robotic video with synchronized kinematics to date, spanning more than 49 institutions and multiple robotic platforms including the CMR Versius, Intuitive Surgical's da Vinci, da Vinci Research Kit (dVRK), Rob Surgical BiTrack, Virtual Incision's MIRA, Moon Surgical Maestro, and a variety of custom systems, spanning surgical manipulation, robotic ultrasound, and endoscopy procedures. We demonstrate the research enabled by this dataset through two foundation models. GR00T-H is the first open foundation vision-language-action model for medical robotics, which is the only evaluated model to achieve full end-to-end task completion on a structured suturing benchmark (25% of trials vs. 0% for all others) and achieves 64% average success across a 29-step ex vivo suturing sequence. We also train Cosmos-H-Surgical-Simulator, the first action-conditioned world model to enable multi-embodiment surgical simulation from a single checkpoint, spanning nine robotic platforms and supporting in silico policy evaluation and synthetic data generation for the medical domain. These results suggest that open, large-scale medical robot data collection can serve as critical infrastructure for the research community, enabling advances in robot learning, world modeling, and beyond.
On-the-fly hand-eye calibration for the da Vinci surgical robot
Jan 21, 2026In Robot-Assisted Minimally Invasive Surgery (RMIS), accurate tool localization is crucial to ensure patient safety and successful task execution. However, this remains challenging for cable-driven robots, such as the da Vinci robot, because erroneous encoder readings lead to pose estimation errors. In this study, we propose a calibration framework to produce accurate tool localization results through computing the hand-eye transformation matrix on-the-fly. The framework consists of two interrelated algorithms: the feature association block and the hand-eye calibration block, which provide robust correspondences for key points detected on monocular images without pre-training, and offer the versatility to accommodate various surgical scenarios by adopting an array of filter approaches, respectively. To validate its efficacy, we test the framework extensively on publicly available video datasets that feature multiple surgical instruments conducting tasks in both in vitro and ex vivo scenarios, under varying illumination conditions and with different levels of key point measurement accuracy. The results show a significant reduction in tool localization errors under the proposed calibration framework, with accuracies comparable to other state-of-the-art methods while being more time-efficient.
Model selection and real-time skill assessment for suturing in robotic surgery
Jan 17, 2026Automated feedback systems have the potential to provide objective skill assessment for training and evaluation in robot-assisted surgery. In this study, we examine methods to achieve real-time prediction of surgical skill level in real-time based on Objective Structured Assessment of Technical Skills (OSATS) scores. Using data acquired from the da Vinci Surgical System, we carry out three main analyses, focusing on model design, their real-time performance, and their skill-level-based cross-validation training. For the model design, we evaluate the effectiveness of multimodal deep learning models for predicting surgical skill levels using synchronized kinematic and vision data. Our models include separate unimodal baselines and fusion architectures that integrate features from both modalities and are evaluated using mean Spearman's correlation coefficients, demonstrating that the fusion model consistently outperforms unimodal models for real-time predictions. For the real-time performance, we observe the prediction's trend over time and highlight correlation with the surgeon's gestures. For the skill-level-based cross-validation, we separately trained models on surgeons with different skill levels, which showed that high-skill demonstrations allow for better performance than those trained on low-skilled ones and generalize well to similarly skilled participants. Our findings show that multimodal learning allows more stable fine-grained evaluation of surgical performance and highlights the value of expert-level training data for model generalization.
Confidence-based Intent Prediction for Teleoperation in Bimanual Robotic Suturing
Apr 29, 2025Robotic-assisted procedures offer enhanced precision, but while fully autonomous systems are limited in task knowledge, difficulties in modeling unstructured environments, and generalisation abilities, fully manual teleoperated systems also face challenges such as delay, stability, and reduced sensory information. To address these, we developed an interactive control strategy that assists the human operator by predicting their motion plan at both high and low levels. At the high level, a surgeme recognition system is employed through a Transformer-based real-time gesture classification model to dynamically adapt to the operator's actions, while at the low level, a Confidence-based Intention Assimilation Controller adjusts robot actions based on user intent and shared control paradigms. The system is built around a robotic suturing task, supported by sensors that capture the kinematics of the robot and task dynamics. Experiments across users with varying skill levels demonstrated the effectiveness of the proposed approach, showing statistically significant improvements in task completion time and user satisfaction compared to traditional teleoperation.
Force interaction, modeling and soft tissue deformation during reciprocating insertion of multi-part probe
Feb 07, 2025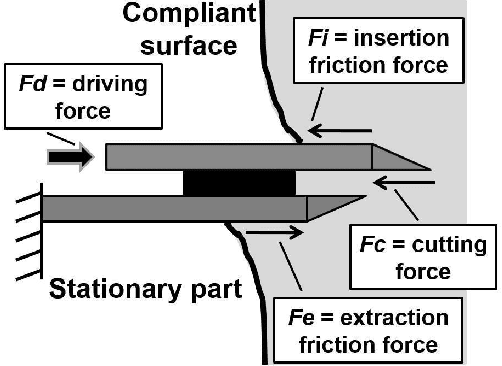
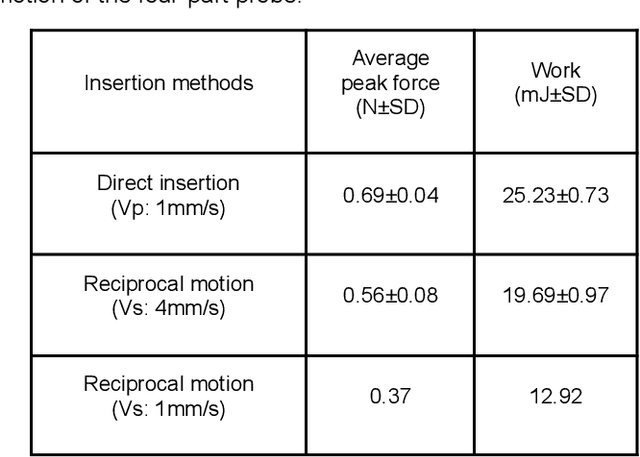
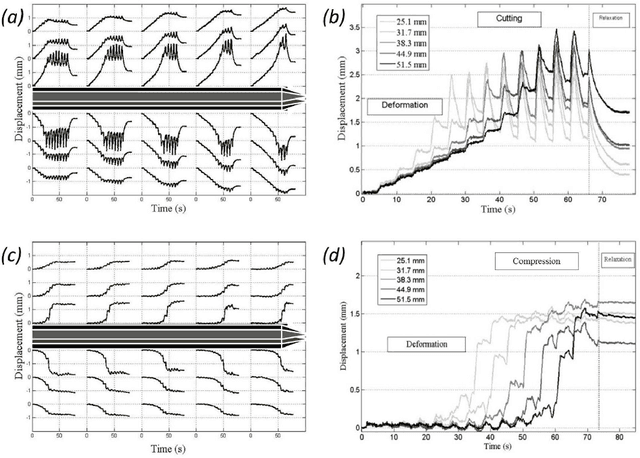
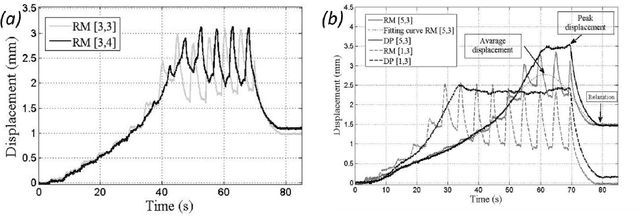
The bio-inspired engineering of ovipositing wasps, which employ a reciprocating motion for soft tissue insertion, offers potential advantages in reducing insertion force and minimizing tissue damage. However, the underlying mechanisms of tissue interaction and sparing are not fully understood. In this study, we aim to investigate a multi-part probe designed to mimic the reciprocating motion of ovipositors. A reciprocal insertion model was developed to study the interaction between the probe and soft tissue, and experimental testing was conducted using a force sensor and laser optical technique to gain insights into interacting forces and tissue deformation. The results reveal that during the cutting phase of reciprocal motion, the peak force and average displacement of the soft substrate were approximately 19% and 20% lower, respectively, compared to direct insertion at an overall probe velocity of 1 mm/s. This study presents a novel approach combining mechanical modeling and experimental analysis to explore the force mechanics of the reciprocating insertion method, providing a better understanding of the interaction between the probe and soft tissue.
CathAction: A Benchmark for Endovascular Intervention Understanding
Aug 23, 2024Real-time visual feedback from catheterization analysis is crucial for enhancing surgical safety and efficiency during endovascular interventions. However, existing datasets are often limited to specific tasks, small scale, and lack the comprehensive annotations necessary for broader endovascular intervention understanding. To tackle these limitations, we introduce CathAction, a large-scale dataset for catheterization understanding. Our CathAction dataset encompasses approximately 500,000 annotated frames for catheterization action understanding and collision detection, and 25,000 ground truth masks for catheter and guidewire segmentation. For each task, we benchmark recent related works in the field. We further discuss the challenges of endovascular intentions compared to traditional computer vision tasks and point out open research questions. We hope that CathAction will facilitate the development of endovascular intervention understanding methods that can be applied to real-world applications. The dataset is available at https://airvlab.github.io/cathdata/.
Semi-Automatic Infrared Calibration for Augmented Reality Systems in Surgery
May 03, 2024Augmented reality (AR) has the potential to improve the immersion and efficiency of computer-assisted orthopaedic surgery (CAOS) by allowing surgeons to maintain focus on the operating site rather than external displays in the operating theatre. Successful deployment of AR to CAOS requires a calibration that can accurately calculate the spatial relationship between real and holographic objects. Several studies attempt this calibration through manual alignment or with additional fiducial markers in the surgical scene. We propose a calibration system that offers a direct method for the calibration of AR head-mounted displays (HMDs) with CAOS systems, by using infrared-reflective marker-arrays widely used in CAOS. In our fast, user-agnostic setup, a HoloLens 2 detected the pose of marker arrays using infrared response and time-of-flight depth obtained through sensors onboard the HMD. Registration with a commercially available CAOS system was achieved when an IR marker-array was visible to both devices. Study tests found relative-tracking mean errors of 2.03 mm and 1.12{\deg} when calculating the relative pose between two static marker-arrays at short ranges. When using the calibration result to provide in-situ holographic guidance for a simulated wire-insertion task, a pre-clinical test reported mean errors of 2.07 mm and 1.54{\deg} when compared to a pre-planned trajectory.
CathFlow: Self-Supervised Segmentation of Catheters in Interventional Ultrasound Using Optical Flow and Transformers
Mar 21, 2024In minimally invasive endovascular procedures, contrast-enhanced angiography remains the most robust imaging technique. However, it is at the expense of the patient and clinician's health due to prolonged radiation exposure. As an alternative, interventional ultrasound has notable benefits such as being radiation-free, fast to deploy, and having a small footprint in the operating room. Yet, ultrasound is hard to interpret, and highly prone to artifacts and noise. Additionally, interventional radiologists must undergo extensive training before they become qualified to diagnose and treat patients effectively, leading to a shortage of staff, and a lack of open-source datasets. In this work, we seek to address both problems by introducing a self-supervised deep learning architecture to segment catheters in longitudinal ultrasound images, without demanding any labeled data. The network architecture builds upon AiAReSeg, a segmentation transformer built with the Attention in Attention mechanism, and is capable of learning feature changes across time and space. To facilitate training, we used synthetic ultrasound data based on physics-driven catheter insertion simulations, and translated the data into a unique CT-Ultrasound common domain, CACTUSS, to improve the segmentation performance. We generated ground truth segmentation masks by computing the optical flow between adjacent frames using FlowNet2, and performed thresholding to obtain a binary map estimate. Finally, we validated our model on a test dataset, consisting of unseen synthetic data and images collected from silicon aorta phantoms, thus demonstrating its potential for applications to clinical data in the future.
AiAReSeg: Catheter Detection and Segmentation in Interventional Ultrasound using Transformers
Sep 25, 2023To date, endovascular surgeries are performed using the golden standard of Fluoroscopy, which uses ionising radiation to visualise catheters and vasculature. Prolonged Fluoroscopic exposure is harmful for the patient and the clinician, and may lead to severe post-operative sequlae such as the development of cancer. Meanwhile, the use of interventional Ultrasound has gained popularity, due to its well-known benefits of small spatial footprint, fast data acquisition, and higher tissue contrast images. However, ultrasound images are hard to interpret, and it is difficult to localise vessels, catheters, and guidewires within them. This work proposes a solution using an adaptation of a state-of-the-art machine learning transformer architecture to detect and segment catheters in axial interventional Ultrasound image sequences. The network architecture was inspired by the Attention in Attention mechanism, temporal tracking networks, and introduced a novel 3D segmentation head that performs 3D deconvolution across time. In order to facilitate training of such deep learning networks, we introduce a new data synthesis pipeline that used physics-based catheter insertion simulations, along with a convolutional ray-casting ultrasound simulator to produce synthetic ultrasound images of endovascular interventions. The proposed method is validated on a hold-out validation dataset, thus demonstrated robustness to ultrasound noise and a wide range of scanning angles. It was also tested on data collected from silicon-based aorta phantoms, thus demonstrated its potential for translation from sim-to-real. This work represents a significant step towards safer and more efficient endovascular surgery using interventional ultrasound.