 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Based Position Control of Soft Hydraulic Actuators
Mar 03, 2023



In this article, we investigate the model based position control of soft hydraulic actuators arranged in an antagonistic pair. A dynamical model of the system is constructed by employing the port-Hamiltonian formulation. A control algorithm is designed with an energy shaping approach which accounts for the pressure dynamics of the fluid. A nonlinear observer is included to compensate the effect of unknown external forces. Simulations demonstrate the effectiveness of the proposed approach, and experiments achieve positioning accuracy of 0.043 mm with a standard deviation of 0.033 mm in the presence of constant external forces up to 1 N.
Optimised Design and Performance Comparison of Soft Robotic Manipulators
Sep 08, 2022
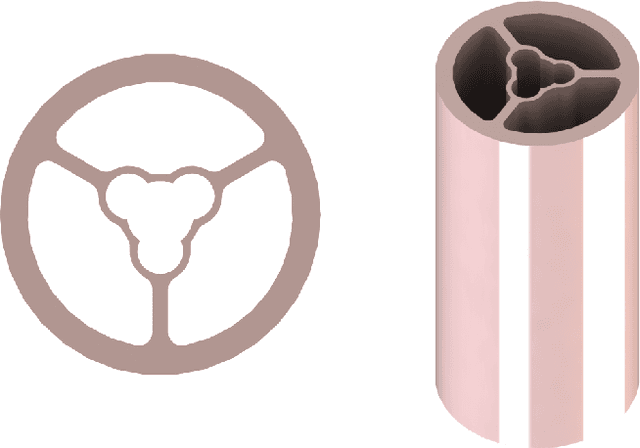
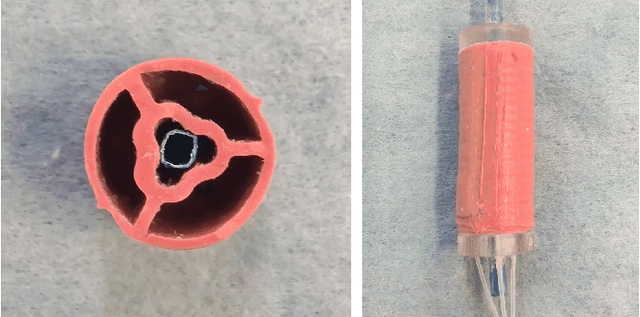
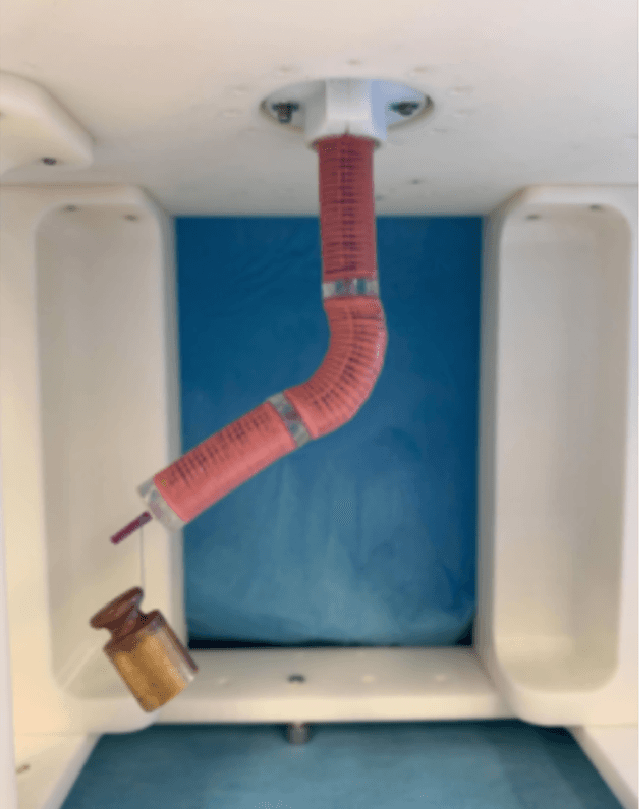
Soft robotic manipulators are attractive for a range of applications such as medical interventions or industrial inspections in confined environments. A myriad of soft robotic manipulators have been proposed in the literature, but their designs tend to be relatively similar, and generally offer a relatively low force. This limits the payload they can carry and therefore their usability. A comparison of force of the different designs is not available under a common framework, and designs present different diameters and features that make them hard to compare. In this paper, we present the design of a soft robotic manipulator that is optimised to maximise its force while respecting typical application constraints such as size, workspace, payload capability, and maximum pressure. The design presented here has the advantage that it morphs to an optimal design as it is pressurised to move in different directions, and this leads to higher lateral force. The robot is designed using a set of principles and thus can be adapted to other applications. We also present a non-dimensional analysis for soft robotic manipulators, and we apply it to compare the performance of the design proposed here with other designs in the literature. We show that our design has a higher force than other designs in the same category. Experimental results confirm the higher force of our proposed design.
Model Predictive Control for Human-Centred Lower Limb Robotic Assistance
Nov 10, 2020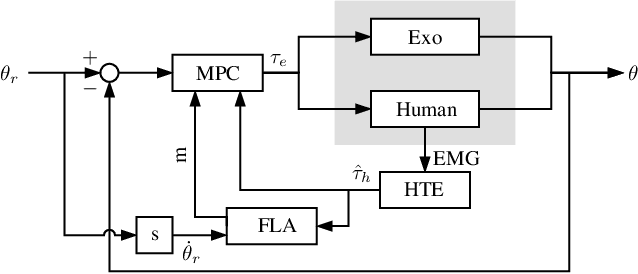


Loss of mobility or balance resulting from neural trauma is a critical consideration in public health. Robotic exoskeletons hold great potential for rehabilitation and assisted movement, yet optimal assist-as-needed (AAN) control remains unresolved given pathological variance among patients. We introduce a model predictive control (MPC) architecture for lower limb exoskeletons centred around a fuzzy logic algorithm (FLA) identifying modes of assistance based on human involvement. Assistance modes are: 1) passive for human relaxed and robot dominant, 2) active-assist for human cooperation with the task, and 3) safety in the case of human resistance to the robot. Human torque is estimated from electromyography (EMG) signals prior to joint motions, enabling advanced prediction of torque by the MPC and selection of assistance mode by the FLA. The controller is demonstrated in hardware with three subjects on a 1-DOF knee exoskeleton tracking a sinusoidal trajectory with human relaxed assistive, and resistive. Experimental results show quick and appropriate transfers among the assistance modes and satisfied assistive performance in each mode. Results illustrate an objective approach to lower limb robotic assistance through on-the-fly transition between modes of movement, providing a new level of human-robot synergy for mobility assist and rehabilitation.