 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Based Position Control of Soft Hydraulic Actuators
Mar 03, 2023



In this article, we investigate the model based position control of soft hydraulic actuators arranged in an antagonistic pair. A dynamical model of the system is constructed by employing the port-Hamiltonian formulation. A control algorithm is designed with an energy shaping approach which accounts for the pressure dynamics of the fluid. A nonlinear observer is included to compensate the effect of unknown external forces. Simulations demonstrate the effectiveness of the proposed approach, and experiments achieve positioning accuracy of 0.043 mm with a standard deviation of 0.033 mm in the presence of constant external forces up to 1 N.
Soft Continuum Actuator Tip Position and Contact Force Prediction, Using Electrical Impedance Tomography and Recurrent Neural Networks
Feb 13, 2023Enabling dexterous manipulation and safe human-robot interaction, soft robots are widely used in numerous surgical applications. One of the complications associated with using soft robots in surgical applications is reconstructing their shape and the external force exerted on them. Several sensor-based and model-based approaches have been proposed to address the issue. In this paper, a shape sensing technique based on Electrical Impedance Tomography (EIT) is proposed. The performance of this sensing technique in predicting the tip position and contact force of a soft bending actuator is highlighted by conducting a series of empirical tests. The predictions were performed based on a data-driven approach using a Long Short-Term Memory (LSTM) recurrent neural network. The tip position predictions indicate the importance of using EIT data along with pressure inputs. Changing the number of EIT channels, we evaluated the effect of the number of EIT inputs on the accuracy of the predictions. The least RMSE values for the tip position are 3.6 and 4.6 mm in Y and Z coordinates, respectively, which are 7.36% and 6.07% of the actuator's total range of motion. Contact force predictions were conducted in three different bending angles and by varying the number of EIT channels. The results of the predictions illustrated that increasing the number of channels contributes to higher accuracy of the force estimation. The mean errors of using 8 channels are 7.69%, 2.13%, and 2.96% of the total force range in three different bending angles.
Lumen Shape Reconstruction using a Soft Robotic Balloon Catheter and Electrical Impedance Tomography
Jul 25, 2022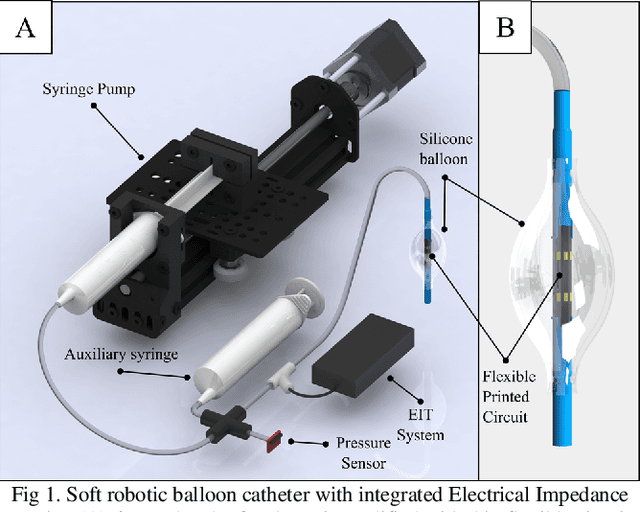
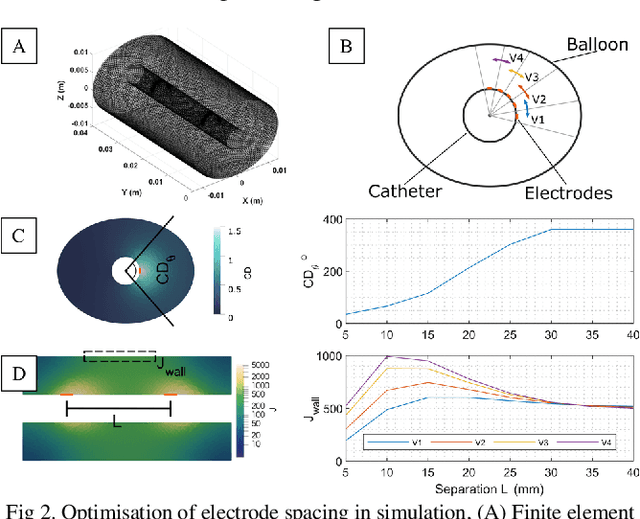
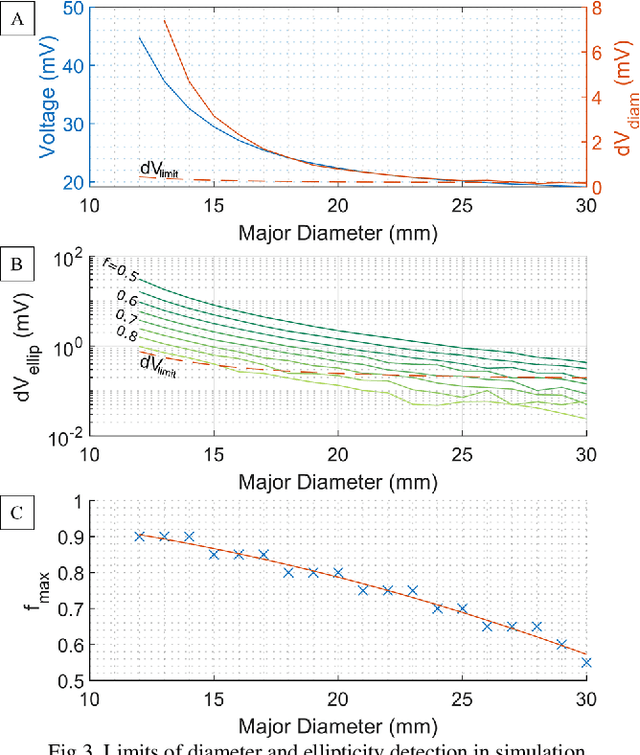
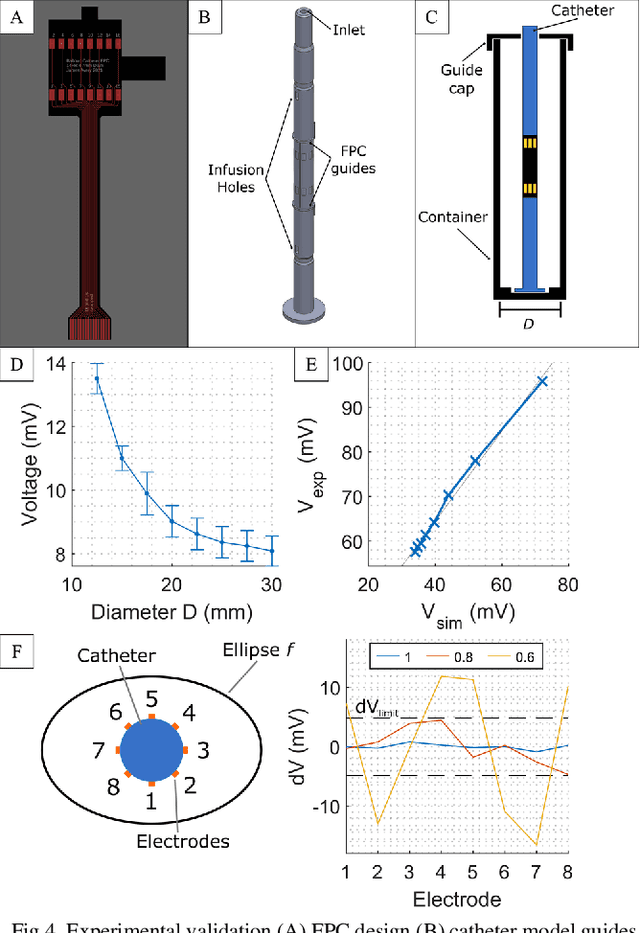
Incorrectly sized balloon catheters can lead to increased post-surgical complications, yet even with preoperative imaging, correct selection remains a challenge. With limited feedback during surgery, it is difficult to verify correct deployment. We propose the use of integrated impedance measurements and Electrical Impedance Tomography (EIT) imaging to assess the deformation of the balloon and determine the size and shape of the surrounding lumen. Previous work using single impedance measurements, or pressure data and analytical models, whilst demonstrating high sizing accuracy, have assumed a circular cross section. Here we extend these methods by adding a multitude of electrodes to detect elliptical and occluded lumen and obtain EIT images to localise deformations. Using a 14 Fr (5.3 mm) catheter as an example, numerical simulations were performed to find the optimal electrode configuration of two rings of 8 electrodes spaced 10 mm apart. The simulations predicted that the maximum detectable aspect ratio decreased from 0.9 for a 14mm balloon to 0.5 at 30mm. The sizing and ellipticity detection results were verified experimentally. A prototype robotic balloon catheter was constructed to automatically inflate a compliant balloon while simultaneously recording EIT and pressure data. Data were collected in experiments replicating stenotic vessels with an elliptical and asymmetrical profile, and the widening of a lumen during angioplasty. After calibration, the system was able to correctly localise the occlusion and detect aspect ratios of 0.75. EIT images further localised the occlusion and visualised the dilation of the lumen during balloon inflation.
Shape Sensing of Variable Stiffness Soft Robots using Electrical Impedance Tomography
Apr 04, 2019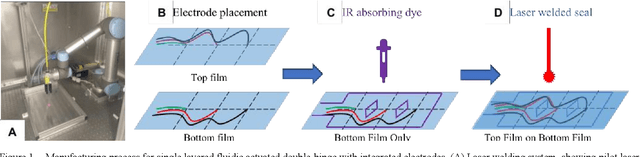
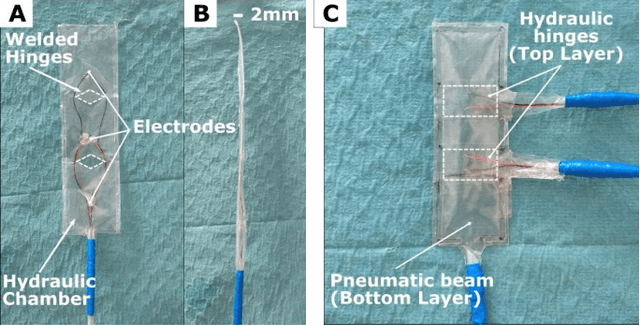
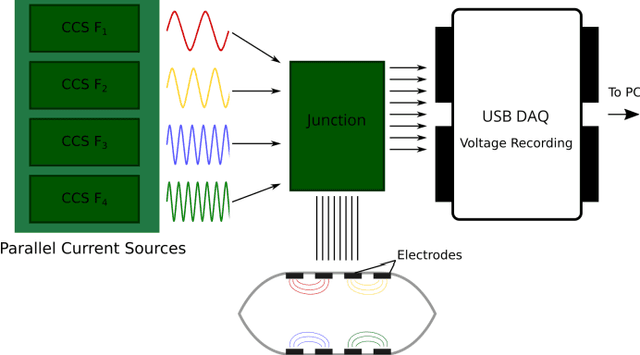
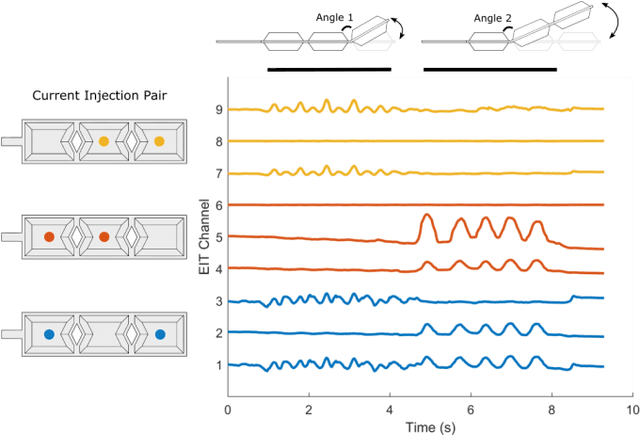
Soft robotic systems offer benefits over traditional rigid systems through reduced contact trauma with soft tissues and by enabling access through tortuous paths in minimally invasive surgery. However, the inherent deformability of soft robots places both a greater onus on accurate modelling of their shape, and greater challenges in realising intraoperative shape sensing. Herein we present a proprioceptive (self-sensing) soft actuator, with an electrically conductive working fluid. Electrical impedance measurements from up to six electrodes enabled tomographic reconstructions using Electrical Impedance Tomography (EIT). A new Frequency Division Multiplexed (FDM) EIT system was developed capable of measurements of 66 dB SNR with 20 ms temporal resolution. The concept was examined in two two-degree-of-freedom designs: a hydraulic hinged actuator and a pneumatic finger actuator with hydraulic beams. Both cases demonstrated that impedance measurements could be used to infer shape changes, and EIT images reconstructed during actuation showed distinct patterns with respect to each degree of freedom (DOF). Whilst there was some mechanical hysteresis observed, the repeatability of the measurements and resultant images was high. The results show the potential of FDM-EIT as a low-cost, low profile shape sensor in soft robots.