 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Robotic-Assisted Diffuse Reflectance Spectroscopy Scanning System
Mar 11, 2025



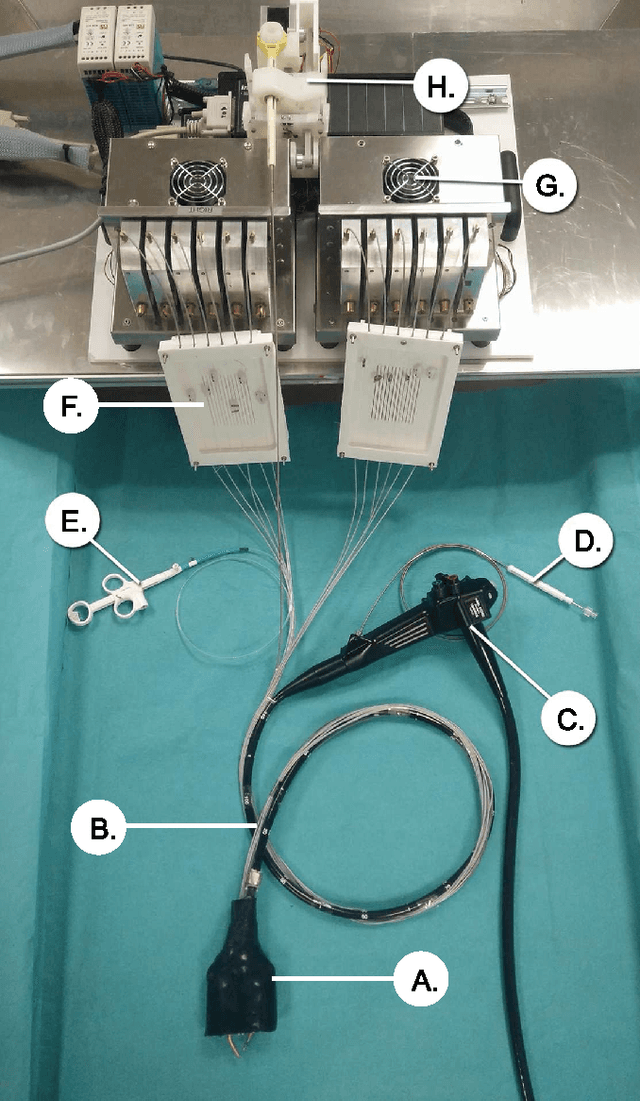
Diffuse Reflectance Spectroscopy (DRS) is a well-established optical technique for tissue composition assessment which has been clinically evaluated for tumour detection to ensure the complete removal of cancerous tissue. While point-wise assessment has many potential applications, incorporating automated large-area scanning would enable holistic tissue sampling with higher consistency. We propose a robotic system to facilitate autonomous DRS scanning with hybrid visual servoing control. A specially designed height compensation module enables precise contact condition control. The evaluation results show that the system can accurately execute the scanning command and acquire consistent DRS spectra with comparable results to the manual collection, which is the current gold standard protocol. Integrating the proposed system into surgery lays the groundwork for autonomous intra-operative DRS tissue assessment with high reliability and repeatability. This could reduce the need for manual scanning by the surgeon while ensuring complete tumor removal in clinical practice.
Shape Sensing of Variable Stiffness Soft Robots using Electrical Impedance Tomography
Apr 04, 2019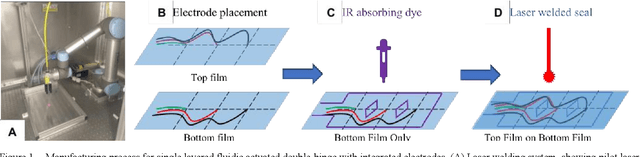
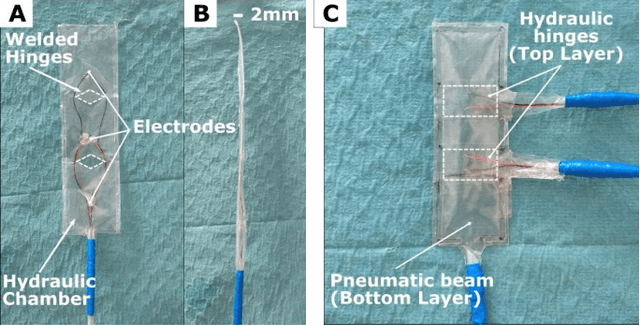
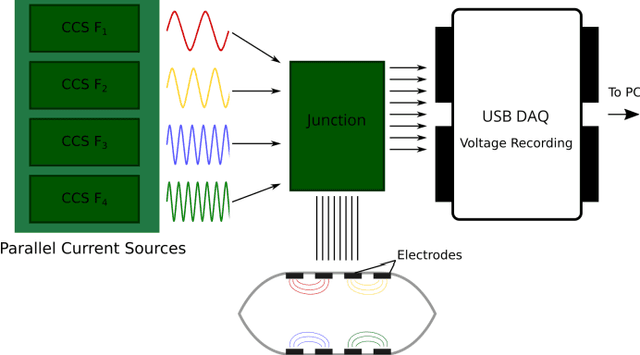
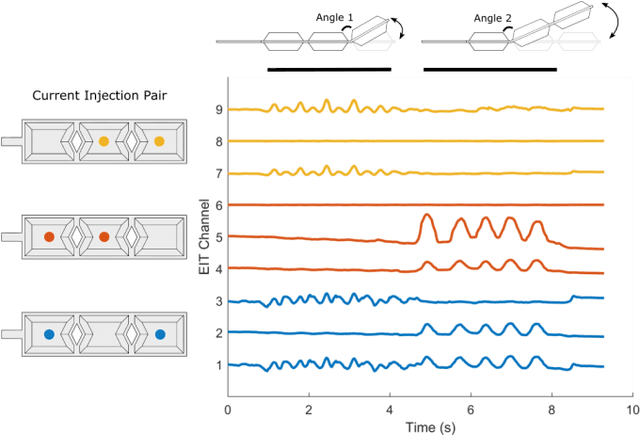
Soft robotic systems offer benefits over traditional rigid systems through reduced contact trauma with soft tissues and by enabling access through tortuous paths in minimally invasive surgery. However, the inherent deformability of soft robots places both a greater onus on accurate modelling of their shape, and greater challenges in realising intraoperative shape sensing. Herein we present a proprioceptive (self-sensing) soft actuator, with an electrically conductive working fluid. Electrical impedance measurements from up to six electrodes enabled tomographic reconstructions using Electrical Impedance Tomography (EIT). A new Frequency Division Multiplexed (FDM) EIT system was developed capable of measurements of 66 dB SNR with 20 ms temporal resolution. The concept was examined in two two-degree-of-freedom designs: a hydraulic hinged actuator and a pneumatic finger actuator with hydraulic beams. Both cases demonstrated that impedance measurements could be used to infer shape changes, and EIT images reconstructed during actuation showed distinct patterns with respect to each degree of freedom (DOF). Whilst there was some mechanical hysteresis observed, the repeatability of the measurements and resultant images was high. The results show the potential of FDM-EIT as a low-cost, low profile shape sensor in soft robots.
Free-View, 3D Gaze-Guided, Assistive Robotic System for Activities of Daily Living
Aug 02, 2018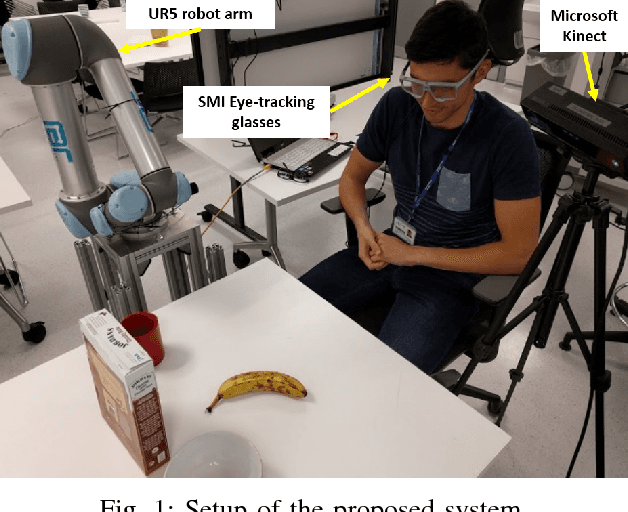
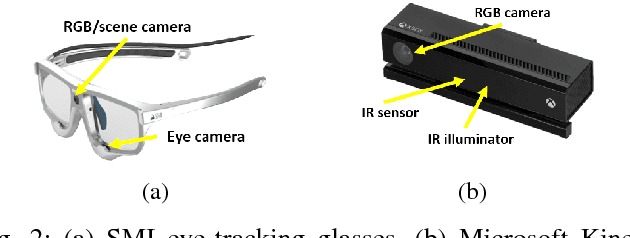


Patients suffering from quadriplegia have limited body motion which prevents them from performing daily activities. We have developed an assistive robotic system with an intuitive free-view gaze interface. The user's point of regard is estimated in 3D space while allowing free head movement and is combined with object recognition and trajectory planning. This framework allows the user to interact with objects using fixations. Two operational modes have been implemented to cater for different eventualities. The automatic mode performs a pre-defined task associated with a gaze-selected object, while the manual mode allows gaze control of the robot's end-effector position on the user's frame of reference. User studies reported effortless operation in automatic mode. A manual pick and place task achieved a success rate of 100% on the users' first attempt.
ESD CYCLOPS: A new robotic surgical system for GI surgery
Apr 18, 2018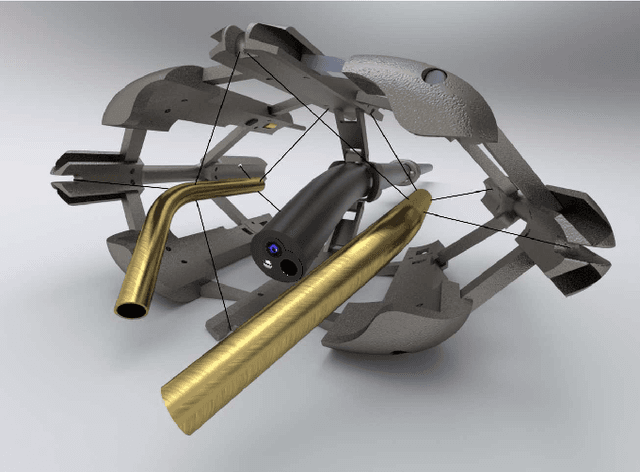
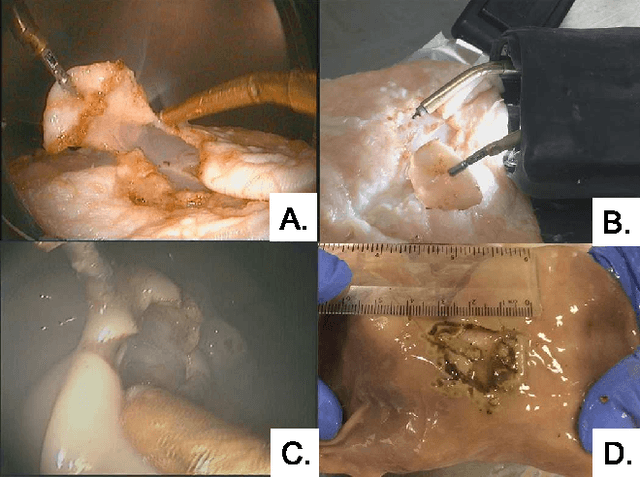

Gastrointestinal (GI) cancers account for 1.5 million deaths worldwide. Endoscopic Submucosal Dissection (ESD) is an advanced therapeutic endoscopy technique with superior clinical outcome due to the minimally invasive and en bloc removal of tumours. In the western world, ESD is seldom carried out, due to its complex and challenging nature. Various surgical systems are being developed to make this therapy accessible, however, these solutions have shown limited operational workspace, dexterity, or low force exertion capabilities. The current paper shows the ESD CYCLOPS system, a bimanual surgical robotic attachment that can be mounted at the end of any flexible endoscope. The system is able to achieve forces of up to 46N, and showed a mean error of 0.217mm during an elliptical tracing task. The workspace and instrument dexterity is shown by pre-clinical ex vivo trials, in which ESD is succesfully performed by a GI surgeon. The system is currently undergoing pre-clinical in vivo validation.