 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree-View, 3D Gaze-Guided, Assistive Robotic System for Activities of Daily Living
Paper and Code
Aug 02, 2018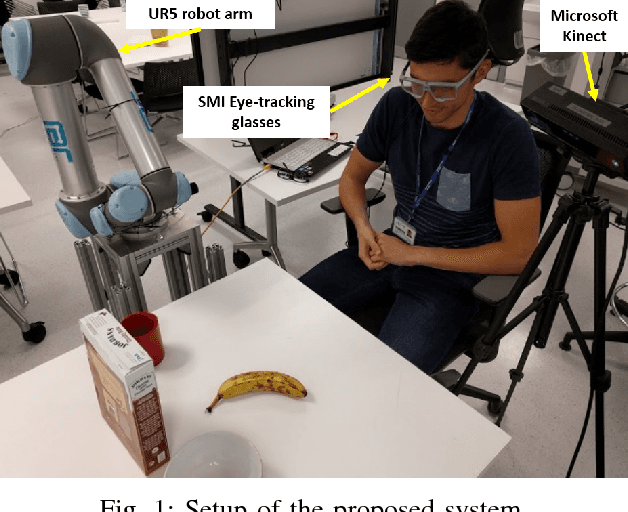
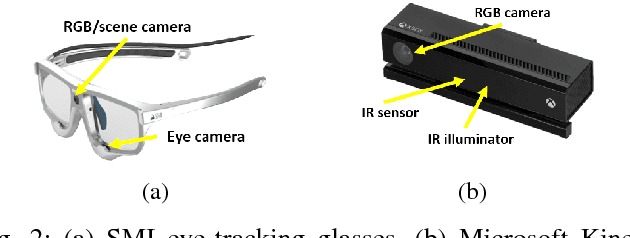


Patients suffering from quadriplegia have limited body motion which prevents them from performing daily activities. We have developed an assistive robotic system with an intuitive free-view gaze interface. The user's point of regard is estimated in 3D space while allowing free head movement and is combined with object recognition and trajectory planning. This framework allows the user to interact with objects using fixations. Two operational modes have been implemented to cater for different eventualities. The automatic mode performs a pre-defined task associated with a gaze-selected object, while the manual mode allows gaze control of the robot's end-effector position on the user's frame of reference. User studies reported effortless operation in automatic mode. A manual pick and place task achieved a success rate of 100% on the users' first attempt.