 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Continuum Actuator Tip Position and Contact Force Prediction, Using Electrical Impedance Tomography and Recurrent Neural Networks
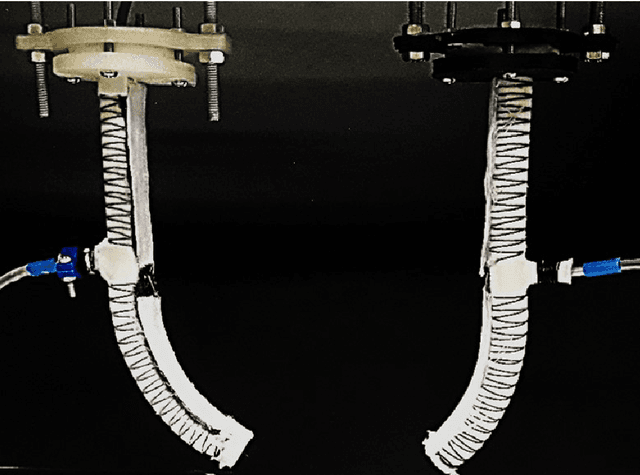
Feb 13, 2023Enabling dexterous manipulation and safe human-robot interaction, soft robots are widely used in numerous surgical applications. One of the complications associated with using soft robots in surgical applications is reconstructing their shape and the external force exerted on them. Several sensor-based and model-based approaches have been proposed to address the issue. In this paper, a shape sensing technique based on Electrical Impedance Tomography (EIT) is proposed. The performance of this sensing technique in predicting the tip position and contact force of a soft bending actuator is highlighted by conducting a series of empirical tests. The predictions were performed based on a data-driven approach using a Long Short-Term Memory (LSTM) recurrent neural network. The tip position predictions indicate the importance of using EIT data along with pressure inputs. Changing the number of EIT channels, we evaluated the effect of the number of EIT inputs on the accuracy of the predictions. The least RMSE values for the tip position are 3.6 and 4.6 mm in Y and Z coordinates, respectively, which are 7.36% and 6.07% of the actuator's total range of motion. Contact force predictions were conducted in three different bending angles and by varying the number of EIT channels. The results of the predictions illustrated that increasing the number of channels contributes to higher accuracy of the force estimation. The mean errors of using 8 channels are 7.69%, 2.13%, and 2.96% of the total force range in three different bending angles.
Control and implementation of fluid-driven soft gripper with dynamic uncertainty of object
Nov 21, 2020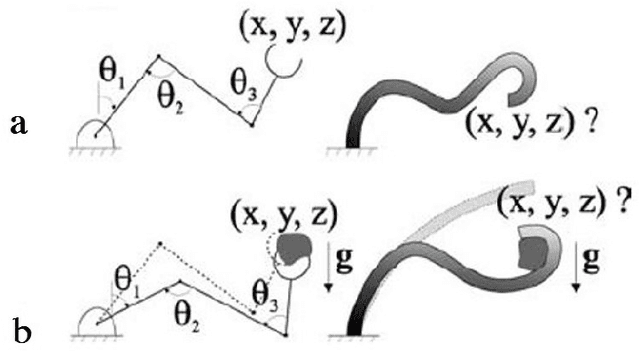


Soft grippers, for stable grasping of objects, with high compliance could be considered a suitable candidate for replacement of conventional rigid grippers, and in recent years, they have been emerging exponentially in industries. Not only are these highly adaptable grippers capable of static grasping of an object, but also they can be utilized for performing object manipulation tasks. Plenty of contemporary studies have been emphasizing on static grasping ability of soft grippers. However, in this thesis, planar in-hand object manipulation in a soft gripper which comprises a pair of soft finger is investigated.