 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Modal Visuo-Tactile Object Perception
Apr 02, 2026Estimating physical properties is critical for safe and efficient autonomous robotic manipulation, particularly during contact-rich interactions. In such settings, vision and tactile sensing provide complementary information about object geometry, pose, inertia, stiffness, and contact dynamics, such as stick-slip behavior. However, these properties are only indirectly observable and cannot always be modeled precisely (e.g., deformation in non-rigid objects coupled with nonlinear contact friction), making the estimation problem inherently complex and requiring sustained exploitation of visuo-tactile sensory information during action. Existing visuo-tactile perception frameworks have primarily emphasized forceful sensor fusion or static cross-modal alignment, with limited consideration of how uncertainty and beliefs about object properties evolve over time. Inspired by human multi-sensory perception and active inference, we propose the Cross-Modal Latent Filter (CMLF) to learn a structured, causal latent state-space of physical object properties. CMLF supports bidirectional transfer of cross-modal priors between vision and touch and integrates sensory evidence through a Bayesian inference process that evolves over time. Real-world robotic experiments demonstrate that CMLF improves the efficiency and robustness of latent physical properties estimation under uncertainty compared to baseline approaches. Beyond performance gains, the model exhibits perceptual coupling phenomena analogous to those observed in humans, including susceptibility to cross-modal illusions and similar trajectories in learning cross-sensory associations. Together, these results constitutes a significant step toward generalizable, robust and physically consistent cross-modal integration for robotic multi-sensory perception.
Adaptive Manipulation Potential and Haptic Estimation for Tool-Mediated Interaction
Mar 11, 2026Achieving human-level dexterity in contact-rich, tool-mediated manipulation remains a significant challenge due to visual occlusion and the underdetermined nature of haptic sensing. This paper introduces a parameterized Equilibrium Manifold (EM) as a unified representation for tool-mediated interaction, and develops a closed-loop framework that integrates haptic estimation, online planning, and adaptive stiffness control. We establish a physical-geometric duality using an adaptive manipulation potential incorporating a differentiable contact model, which induces the manifold's geometric structure and ensures that complex physical interactions are encapsulated as continuous operations on the EM. Within this framework, we reformulate haptic estimation as a manifold parameter estimation problem. Specifically, a hybrid inference strategy (haptic SLAM) is employed in which discrete object shapes are classified via particle filtering, while the continuous object pose is estimated using analytical gradients for efficient optimization. By continuously updating the parameters of the manipulation potential, the framework dynamically reshapes the induced EM to guide online trajectory replanning and implement uncertainty-aware impedance control, thereby closing the perception-action loop. The system is validated through simulation and over 260 real-world screw-loosening trials. Experimental results demonstrate robust identification and manipulation success in standard scenarios while maintaining accurate tracking. Furthermore, ablation studies confirm that haptic SLAM and uncertainty-aware stiffness modulation outperform fixed impedance baselines, effectively preventing jamming during tight tolerance interactions.
Augmenting Human Balance with Generic Supernumerary Robotic Limbs
Feb 16, 2026Supernumerary robotic limbs (SLs) have the potential to transform a wide range of human activities, yet their usability remains limited by key technical challenges, particularly in ensuring safety and achieving versatile control. Here, we address the critical problem of maintaining balance in the human-SLs system, a prerequisite for safe and comfortable augmentation tasks. Unlike previous approaches that developed SLs specifically for stability support, we propose a general framework for preserving balance with SLs designed for generic use. Our hierarchical three-layer architecture consists of: (i) a prediction layer that estimates human trunk and center of mass (CoM) dynamics, (ii) a planning layer that generates optimal CoM trajectories to counteract trunk movements and computes the corresponding SL control inputs, and (iii) a control layer that executes these inputs on the SL hardware. We evaluated the framework with ten participants performing forward and lateral bending tasks. The results show a clear reduction in stance instability, demonstrating the framework's effectiveness in enhancing balance. This work paves the path towards safe and versatile human-SLs interactions. [This paper has been submitted for publication to IEEE.]
Model selection and real-time skill assessment for suturing in robotic surgery
Jan 17, 2026Automated feedback systems have the potential to provide objective skill assessment for training and evaluation in robot-assisted surgery. In this study, we examine methods to achieve real-time prediction of surgical skill level in real-time based on Objective Structured Assessment of Technical Skills (OSATS) scores. Using data acquired from the da Vinci Surgical System, we carry out three main analyses, focusing on model design, their real-time performance, and their skill-level-based cross-validation training. For the model design, we evaluate the effectiveness of multimodal deep learning models for predicting surgical skill levels using synchronized kinematic and vision data. Our models include separate unimodal baselines and fusion architectures that integrate features from both modalities and are evaluated using mean Spearman's correlation coefficients, demonstrating that the fusion model consistently outperforms unimodal models for real-time predictions. For the real-time performance, we observe the prediction's trend over time and highlight correlation with the surgeon's gestures. For the skill-level-based cross-validation, we separately trained models on surgeons with different skill levels, which showed that high-skill demonstrations allow for better performance than those trained on low-skilled ones and generalize well to similarly skilled participants. Our findings show that multimodal learning allows more stable fine-grained evaluation of surgical performance and highlights the value of expert-level training data for model generalization.
Confidence-based Intent Prediction for Teleoperation in Bimanual Robotic Suturing
Apr 29, 2025Robotic-assisted procedures offer enhanced precision, but while fully autonomous systems are limited in task knowledge, difficulties in modeling unstructured environments, and generalisation abilities, fully manual teleoperated systems also face challenges such as delay, stability, and reduced sensory information. To address these, we developed an interactive control strategy that assists the human operator by predicting their motion plan at both high and low levels. At the high level, a surgeme recognition system is employed through a Transformer-based real-time gesture classification model to dynamically adapt to the operator's actions, while at the low level, a Confidence-based Intention Assimilation Controller adjusts robot actions based on user intent and shared control paradigms. The system is built around a robotic suturing task, supported by sensors that capture the kinematics of the robot and task dynamics. Experiments across users with varying skill levels demonstrated the effectiveness of the proposed approach, showing statistically significant improvements in task completion time and user satisfaction compared to traditional teleoperation.
Switch-based Independent Antagonist Actuation with a Single Motor for a Soft Exosuit
Feb 07, 2025



The use of a cable-driven soft exosuit poses challenges with regards to the mechanical design of the actuation system, particularly when used for actuation along multiple degrees of freedom (DoF). The simplest general solution requires the use of two actuators to be capable of inducing movement along one DoF. However, this solution is not practical for the development of multi-joint exosuits. Reducing the number of actuators is a critical need in multi-DoF exosuits. We propose a switch-based mechanism to control an antagonist pair of cables such that it can actuate along any cable path geometry. The results showed that 298.24ms was needed for switching between cables. While this latency is relatively large, it can reduced in the future by a better choice of the motor used for actuation.
Predictive Visuo-Tactile Interactive Perception Framework for Object Properties Inference
Nov 13, 2024Interactive exploration of the unknown physical properties of objects such as stiffness, mass, center of mass, friction coefficient, and shape is crucial for autonomous robotic systems operating continuously in unstructured environments. Precise identification of these properties is essential to manipulate objects in a stable and controlled way, and is also required to anticipate the outcomes of (prehensile or non-prehensile) manipulation actions such as pushing, pulling, lifting, etc. Our study focuses on autonomously inferring the physical properties of a diverse set of various homogeneous, heterogeneous, and articulated objects utilizing a robotic system equipped with vision and tactile sensors. We propose a novel predictive perception framework for identifying object properties of the diverse objects by leveraging versatile exploratory actions: non-prehensile pushing and prehensile pulling. As part of the framework, we propose a novel active shape perception to seamlessly initiate exploration. Our innovative dual differentiable filtering with Graph Neural Networks learns the object-robot interaction and performs consistent inference of indirectly observable time-invariant object properties. In addition, we formulate a $N$-step information gain approach to actively select the most informative actions for efficient learning and inference. Extensive real-robot experiments with planar objects show that our predictive perception framework results in better performance than the state-of-the-art baseline and demonstrate our framework in three major applications for i) object tracking, ii) goal-driven task, and iii) change in environment detection.
Interacting humans and robots can improve sensory prediction by adapting their viscoelasticity
Oct 17, 2024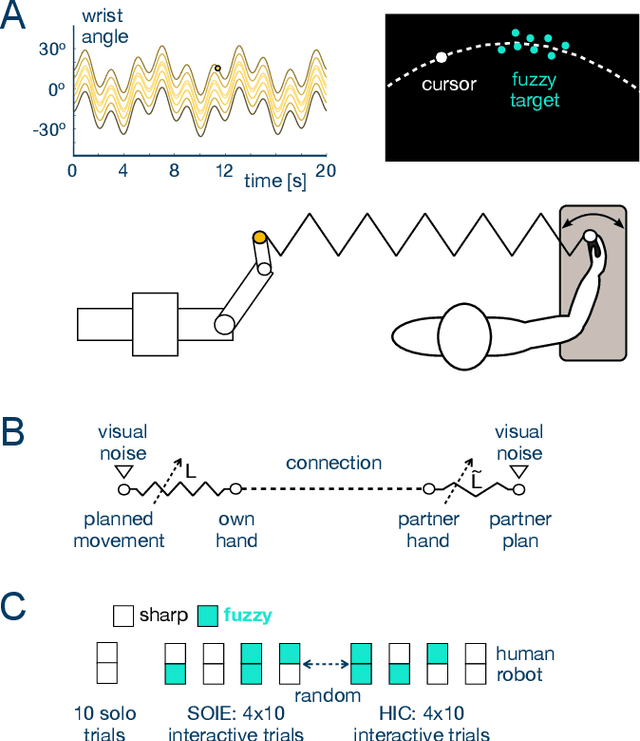
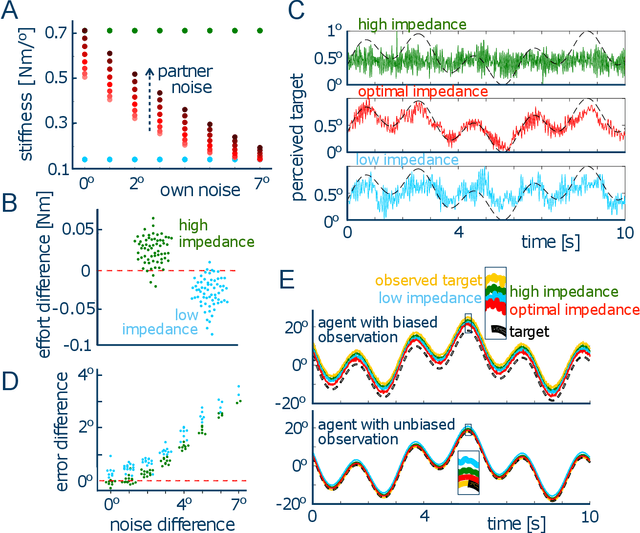
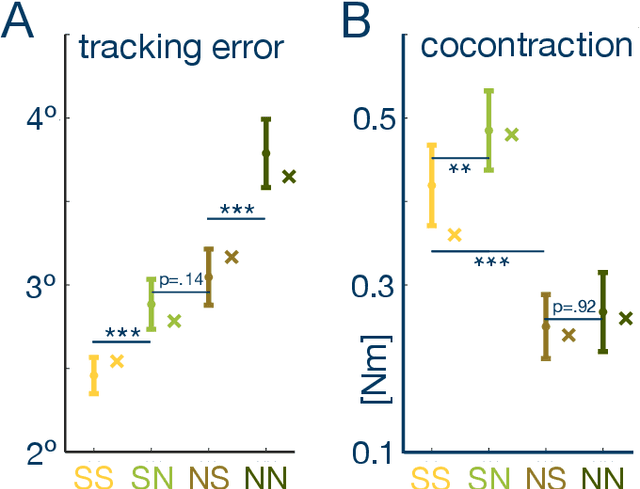
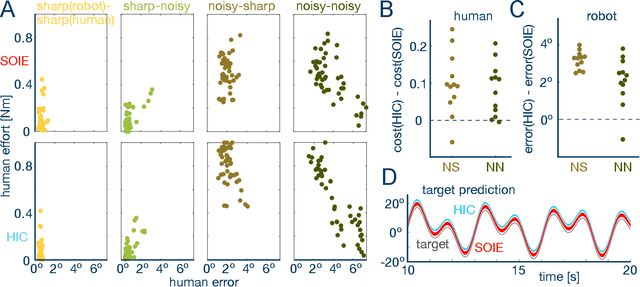
To manipulate objects or dance together, humans and robots exchange energy and haptic information. While the exchange of energy in human-robot interaction has been extensively investigated, the underlying exchange of haptic information is not well understood. Here, we develop a computational model of the mechanical and sensory interactions between agents that can tune their viscoelasticity while considering their sensory and motor noise. The resulting stochastic-optimal-information-and-effort (SOIE) controller predicts how the exchange of haptic information and the performance can be improved by adjusting viscoelasticity. This controller was first implemented on a robot-robot experiment with a tracking task which showed its superior performance when compared to either stiff or compliant control. Importantly, the optimal controller also predicts how connected humans alter their muscle activation to improve haptic communication, with differentiated viscoelasticity adjustment to their own sensing noise and haptic perturbations. A human-robot experiment then illustrated the applicability of this optimal control strategy for robots, yielding improved tracking performance and effective haptic communication as the robot adjusted its viscoelasticity according to its own and the user's noise characteristics. The proposed SOIE controller may thus be used to improve haptic communication and collaboration of humans and robots.
Haptic feedback of front car motion can improve driving control
Jul 29, 2024



This study investigates the role of haptic feedback in a car-following scenario, where information about the motion of the front vehicle is provided through a virtual elastic connection with it. Using a robotic interface in a simulated driving environment, we examined the impact of varying levels of such haptic feedback on the driver's ability to follow the road while avoiding obstacles. The results of an experiment with 15 subjects indicate that haptic feedback from the front car's motion can significantly improve driving control (i.e., reduce motion jerk and deviation from the road) and reduce mental load (evaluated via questionnaire). This suggests that haptic communication, as observed between physically interacting humans, can be leveraged to improve safety and efficiency in automated driving systems, warranting further testing in real driving scenarios.
Visuo-Tactile based Predictive Cross Modal Perception for Object Exploration in Robotics
May 23, 2024Autonomously exploring the unknown physical properties of novel objects such as stiffness, mass, center of mass, friction coefficient, and shape is crucial for autonomous robotic systems operating continuously in unstructured environments. We introduce a novel visuo-tactile based predictive cross-modal perception framework where initial visual observations (shape) aid in obtaining an initial prior over the object properties (mass). The initial prior improves the efficiency of the object property estimation, which is autonomously inferred via interactive non-prehensile pushing and using a dual filtering approach. The inferred properties are then used to enhance the predictive capability of the cross-modal function efficiently by using a human-inspired `surprise' formulation. We evaluated our proposed framework in the real-robotic scenario, demonstrating superior performance.