 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiking Neural Network Decoders of Finger Forces from High-Density Intramuscular Microelectrode Arrays
Sep 04, 2025

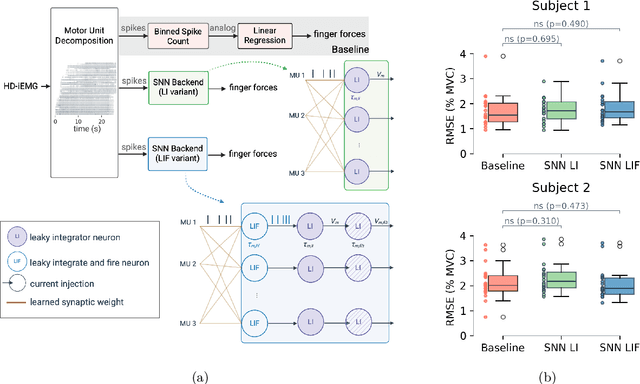

Restoring naturalistic finger control in assistive technologies requires the continuous decoding of motor intent with high accuracy, efficiency, and robustness. Here, we present a spike-based decoding framework that integrates spiking neural networks (SNNs) with motor unit activity extracted from high-density intramuscular microelectrode arrays. We demonstrate simultaneous and proportional decoding of individual finger forces from motor unit spike trains during isometric contractions at 15% of maximum voluntary contraction using SNNs. We systematically evaluated alternative SNN decoder configurations and compared two possible input modalities: physiologically grounded motor unit spike trains and spike-encoded intramuscular EMG signals. Through this comparison, we quantified trade-offs between decoding accuracy, memory footprint, and robustness to input errors. The results showed that shallow SNNs can reliably decode finger-level motor intent with competitive accuracy and minimal latency, while operating with reduced memory requirements and without the need for external preprocessing buffers. This work provides a practical blueprint for integrating SNNs into finger-level force decoding systems, demonstrating how the choice of input representation can be strategically tailored to meet application-specific requirements for accuracy, robustness, and memory efficiency.
Unlocking the Full Potential of High-Density Surface EMG: Novel Non-Invasive High-Yield Motor Unit Decomposition
Oct 18, 2024The decomposition of high-density surface electromyography (HD-sEMG) signals into motor unit discharge patterns has become a powerful tool for investigating the neural control of movement, providing insights into motor neuron recruitment and discharge behavior. However, current algorithms, while very effective under certain conditions, face significant challenges in complex scenarios, as their accuracy and motor unit yield are highly dependent on anatomical differences among individuals. This can limit the number of decomposed motor units, particularly in challenging conditions. To address this issue, we recently introduced Swarm-Contrastive Decomposition (SCD), which dynamically adjusts the separation function based on the distribution of the data and prevents convergence to the same source. Initially applied to intramuscular EMG signals, SCD is here adapted for HD-sEMG signals. We demonstrated its ability to address key challenges faced by existing methods, particularly in identifying low-amplitude motor unit action potentials and effectively handling complex decomposition scenarios, like high-interference signals. We extensively validated SCD using simulated and experimental HD-sEMG recordings and compared it with current state-of-the-art decomposition methods under varying conditions, including different excitation levels, noise intensities, force profiles, sexes, and muscle groups. The proposed method consistently outperformed existing techniques in both the quantity of decoded motor units and the precision of their firing time identification. For instance, under certain experimental conditions, SCD detected more than three times as many motor units compared to previous methods, while also significantly improving accuracy. These advancements represent a major step forward in non-invasive EMG technology for studying motor unit activity in complex scenarios.
Intramuscular High-Density Micro-Electrode Arrays Enable High-Precision Decoding and Mapping of Spinal Motor Neurons to Reveal Hand Control
Oct 14, 2024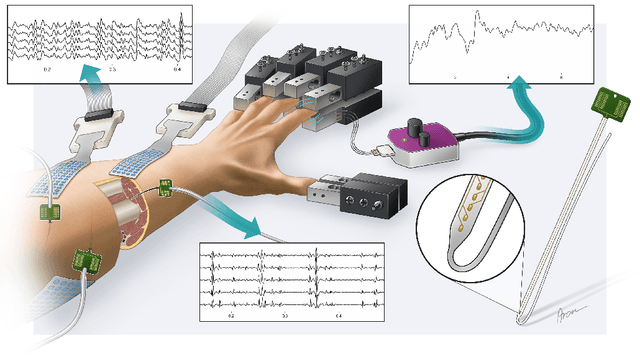
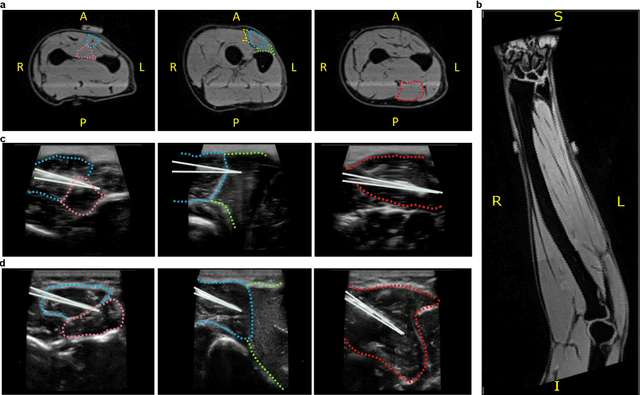
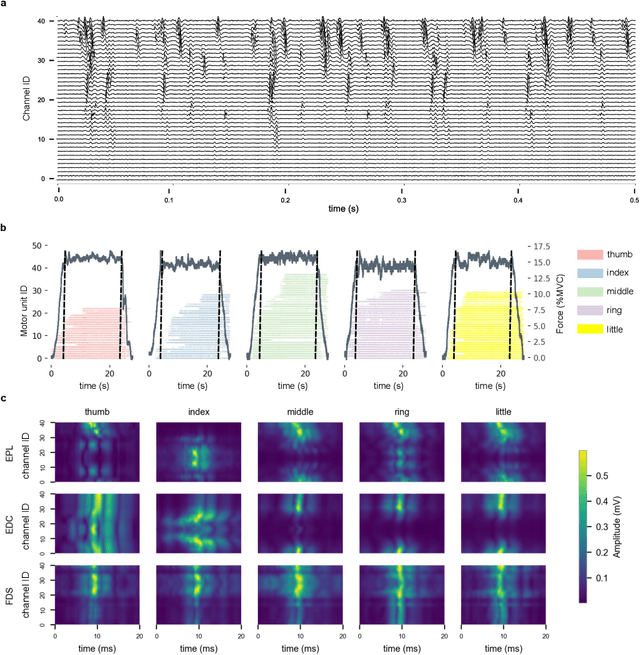
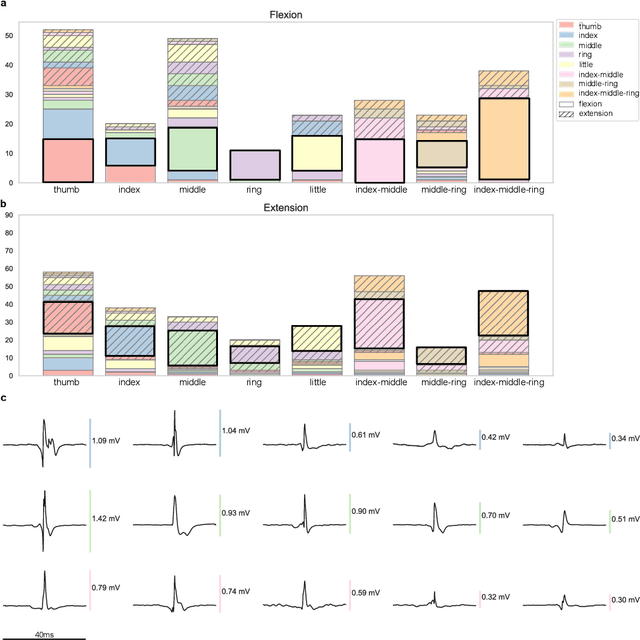
Decoding nervous system activity is a key challenge in neuroscience and neural interfacing. In this study, we propose a novel neural decoding system that enables unprecedented large-scale sampling of muscle activity. Using micro-electrode arrays with more than 100 channels embedded within the forearm muscles, we recorded high-density signals that captured multi-unit motor neuron activity. This extensive sampling was complemented by advanced methods for neural decomposition, analysis, and classification, allowing us to accurately detect and interpret the spiking activity of spinal motor neurons that innervate hand muscles. We evaluated this system in two healthy participants, each implanted with three electromyogram (EMG) micro-electrode arrays (comprising 40 electrodes each) in the forearm. These arrays recorded muscle activity during both single- and multi-digit isometric contractions. For the first time under controlled conditions, we demonstrate that multi-digit tasks elicit unique patterns of motor neuron recruitment specific to each task, rather than employing combinations of recruitment patterns from single-digit tasks. This observation led us to hypothesize that hand tasks could be classified with high precision based on the decoded neural activity. We achieved perfect classification accuracy (100%) across 12 distinct single- and multi-digit tasks, and consistently high accuracy (>96\%) across all conditions and subjects, for up to 16 task classes. These results significantly outperformed conventional EMG classification methods. The exceptional performance of this system paves the way for developing advanced neural interfaces based on invasive high-density EMG technology. This innovation could greatly enhance human-computer interaction and lead to substantial improvements in assistive technologies, offering new possibilities for restoring motor function in clinical applications.
HarmonICA: Neural non-stationarity correction and source separation for motor neuron interfaces
Jun 28, 2024A major outstanding problem when interfacing with spinal motor neurons is how to accurately compensate for non-stationary effects in the signal during source separation routines, particularly when they cannot be estimated in advance. This forces current systems to instead use undifferentiated bulk signal, which limits the potential degrees of freedom for control. In this study we propose a potential solution, using an unsupervised learning algorithm to blindly correct for the effects of latent processes which drive the signal non-stationarities. We implement this methodology within the theoretical framework of a quasilinear version of independent component analysis (ICA). The proposed design, HarmonICA, sidesteps the identifiability problems of nonlinear ICA, allowing for equivalent predictability to linear ICA whilst retaining the ability to learn complex nonlinear relationships between non-stationary latents and their effects on the signal. We test HarmonICA on both invasive and non-invasive recordings both simulated and real, demonstrating an ability to blindly compensate for the non-stationary effects specific to each, and thus to significantly enhance the quality of a source separation routine.
Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array
Mar 29, 2024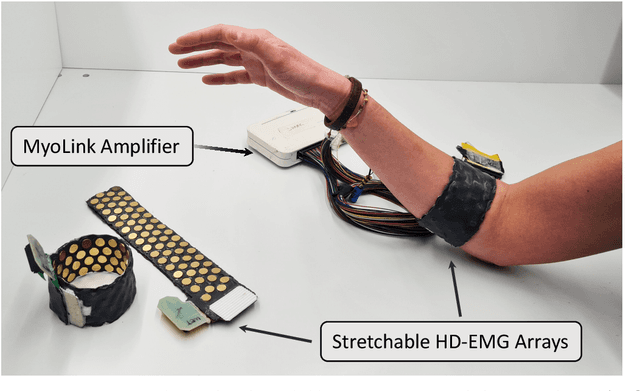

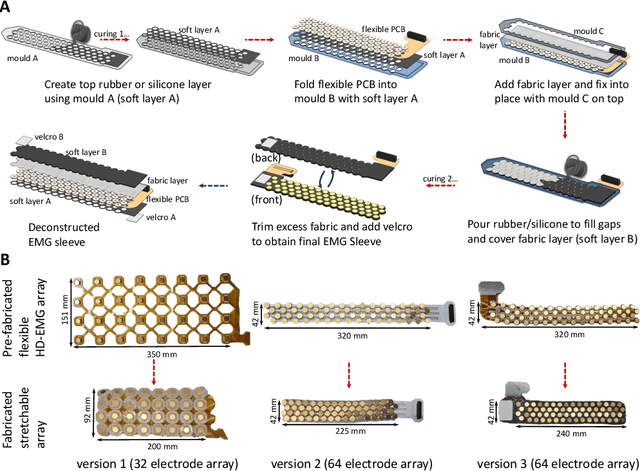
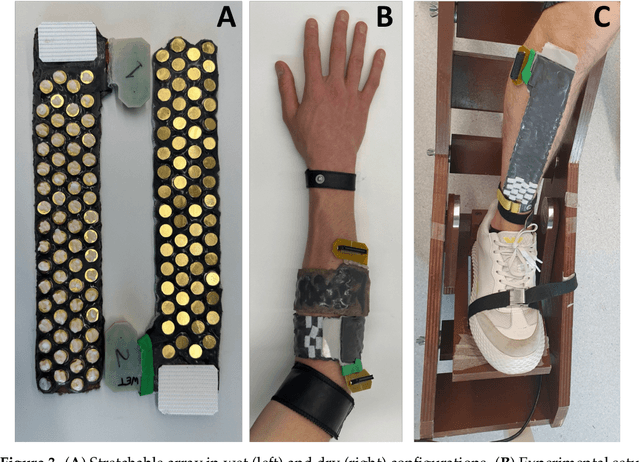
The adoption of high-density electrode systems for human-machine interfaces in real-life applications has been impeded by practical and technical challenges, including noise interference, motion artifacts and the lack of compact electrode interfaces. To overcome some of these challenges, we introduce a wearable and stretchable electromyography (EMG) array, and present its design, fabrication methodology, characterisation, and comprehensive evaluation. Our proposed solution comprises dry-electrodes on flexible printed circuit board (PCB) substrates, eliminating the need for time-consuming skin preparation. The proposed fabrication method allows the manufacturing of stretchable sleeves, with consistent and standardised coverage across subjects. We thoroughly tested our developed prototype, evaluating its potential for application in both research and real-world environments. The results of our study showed that the developed stretchable array matches or outperforms traditional EMG grids and holds promise in furthering the real-world translation of high-density EMG for human-machine interfaces.
* This is the author's version of the manuscript published in MDPI Sensors journal - https://www.mdpi.com/1424-8220/24/6/1810 , This manuscript is in IEEE format - 8 pages, 5 figures, 1 table