 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying Ergonomics in the Elevate Soft Robotic Suit
Jan 24, 2026Soft robotic suits have the potential to rehabilitate, assist, and augment the human body. The low weight, cost, and minimal form-factor of these devices make them ideal for daily use by both healthy and impaired individuals. However, challenges associated with data-driven, user-specific, and comfort-first design of human-robot interfaces using soft materials limit their widespread translation and adoption. In this work, we present the quantitative evaluation of ergonomics and comfort of the Elevate suit - a cable driven soft robotic suit that assists shoulder elevation. Using a motion-capture system and force sensors, we measured the suit's ergonomics during assisted shoulder elevation up to 70 degrees. Two 4-hour sessions were conducted with one subject, involving transmitting cable tensions of up to 200N with no discomfort reported. We estimated that the pressure applied to the shoulder during assisted movements was within the range seen in a human grasp (approximately 69.1-85.1kPa), and estimated volumetric compression of <3% and <8% across the torso and upper arm, respectively. These results provide early validation of Elevate's ergonomic design in preparation for future studies with patient groups.
Switch-based Independent Antagonist Actuation with a Single Motor for a Soft Exosuit
Feb 07, 2025



The use of a cable-driven soft exosuit poses challenges with regards to the mechanical design of the actuation system, particularly when used for actuation along multiple degrees of freedom (DoF). The simplest general solution requires the use of two actuators to be capable of inducing movement along one DoF. However, this solution is not practical for the development of multi-joint exosuits. Reducing the number of actuators is a critical need in multi-DoF exosuits. We propose a switch-based mechanism to control an antagonist pair of cables such that it can actuate along any cable path geometry. The results showed that 298.24ms was needed for switching between cables. While this latency is relatively large, it can reduced in the future by a better choice of the motor used for actuation.
Space Physiology and Technology: Musculoskeletal Adaptations, Countermeasures, and the Opportunity for Wearable Robotics
Apr 04, 2024Space poses significant challenges for human physiology, leading to physiological adaptations in response to an environment vastly different from Earth. While these adaptations can be beneficial, they may not fully counteract the adverse impact of space-related stressors. A comprehensive understanding of these physiological adaptations is needed to devise effective countermeasures to support human life in space. This review focuses on the impact of the environment in space on the musculoskeletal system. It highlights the complex interplay between bone and muscle adaptation, the underlying physiological mechanisms, and their implications on astronaut health. Furthermore, the review delves into the deployed and current advances in countermeasures and proposes, as a perspective for future developments, wearable sensing and robotic technologies, such as exoskeletons, as a fitting alternative.
Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array
Mar 29, 2024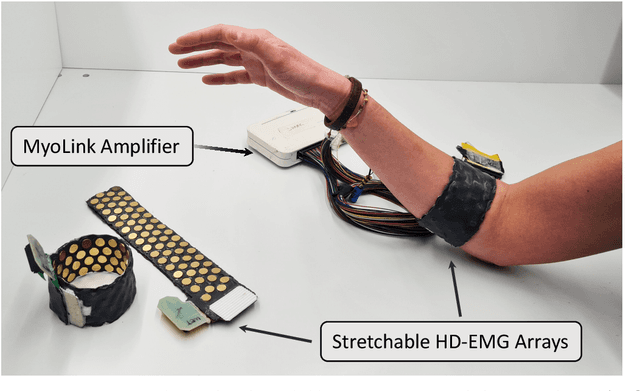

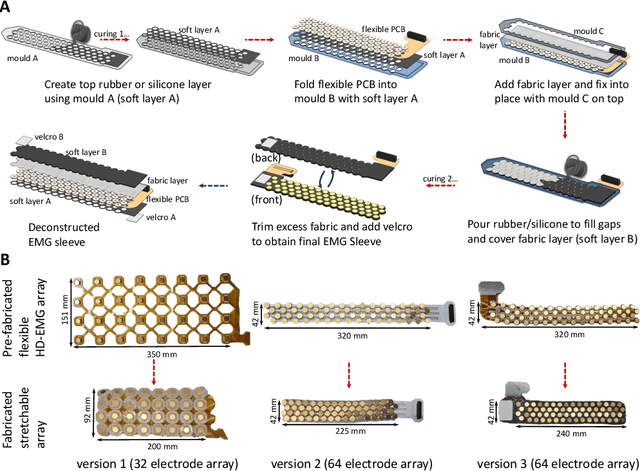
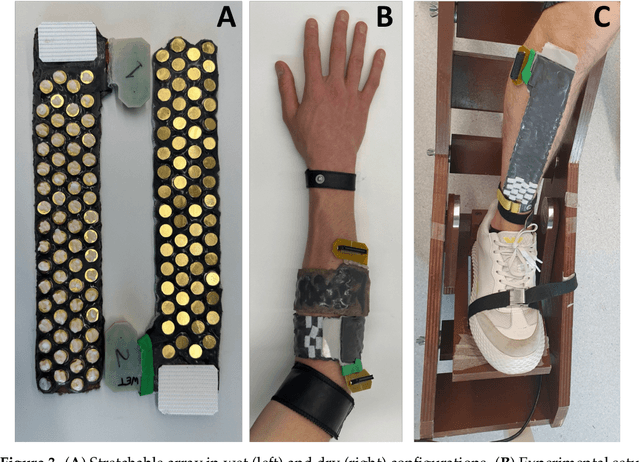
The adoption of high-density electrode systems for human-machine interfaces in real-life applications has been impeded by practical and technical challenges, including noise interference, motion artifacts and the lack of compact electrode interfaces. To overcome some of these challenges, we introduce a wearable and stretchable electromyography (EMG) array, and present its design, fabrication methodology, characterisation, and comprehensive evaluation. Our proposed solution comprises dry-electrodes on flexible printed circuit board (PCB) substrates, eliminating the need for time-consuming skin preparation. The proposed fabrication method allows the manufacturing of stretchable sleeves, with consistent and standardised coverage across subjects. We thoroughly tested our developed prototype, evaluating its potential for application in both research and real-world environments. The results of our study showed that the developed stretchable array matches or outperforms traditional EMG grids and holds promise in furthering the real-world translation of high-density EMG for human-machine interfaces.
* This is the author's version of the manuscript published in MDPI Sensors journal - https://www.mdpi.com/1424-8220/24/6/1810 , This manuscript is in IEEE format - 8 pages, 5 figures, 1 table
Design and Preliminary Evaluation of a Torso Stabiliser for Individuals with Spinal Cord Injury
Mar 26, 2024



Spinal cord injuries (SCIs) generally result in sensory and mobility impairments, with torso instability being particularly debilitating. Existing torso stabilisers are often rigid and restrictive. This paper presents an early investigation into a non-restrictive 1 degree-of-freedom (DoF) mechanical torso stabiliser inspired by devices such as centrifugal clutches and seat-belt mechanisms. Firstly, the paper presents a motion-capture (MoCap) and OpenSim-based kinematic analysis of the cable-based system to understand requisite device characteristics. The simulated evaluation resulted in the cable-based device to require 55-60cm of unrestricted travel, and to lock at a threshold cable velocity of 80-100cm/sec. Next, the developed 1-DoF device is introduced. The proposed mechanical device is transparent during activities of daily living, and transitions to compliant blocking when incipient fall is detected. Prototype behaviour was then validated using a MoCap-based kinematic analysis to verify non-restrictive movement, reliable transition to blocking, and compliance of the blocking.
Nonlinearity Compensation in a Multi-DoF Shoulder Sensing Exosuit for Real-Time Teleoperation
Feb 21, 2020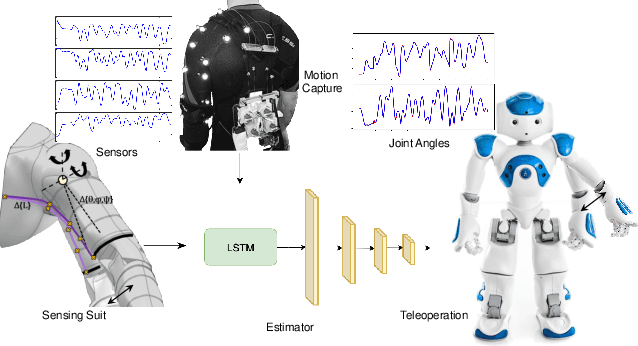

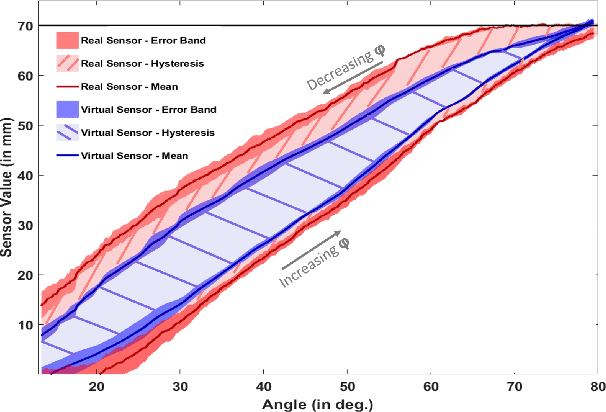
The compliant nature of soft wearable robots makes them ideal for complex multiple degrees of freedom (DoF) joints, but also introduce additional structural nonlinearities. Intuitive control of these wearable robots requires robust sensing to overcome the inherent nonlinearities. This paper presents a joint kinematics estimator for a bio-inspired multi-DoF shoulder exosuit capable of compensating the encountered nonlinearities. To overcome the nonlinearities and hysteresis inherent to the soft and compliant nature of the suit, we developed a deep learning-based method to map the sensor data to the joint space. The experimental results show that the new learning-based framework outperforms recent state-of-the-art methods by a large margin while achieving 12ms inference time using only a GPU-based edge-computing device. The effectiveness of our combined exosuit and learning framework is demonstrated through real-time teleoperation with a simulated NAO humanoid robot.
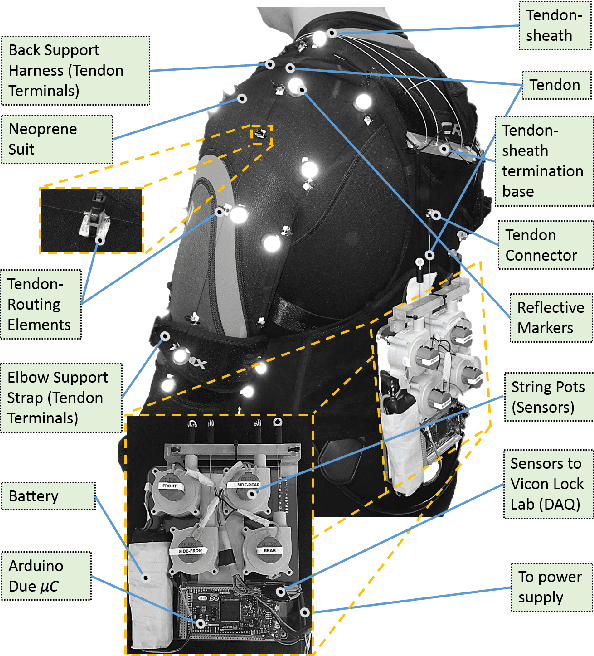
Design and Prototyping of a Bio-inspired Kinematic Sensing Suit for the Shoulder Joint: Precursor to a Multi-DoF Shoulder Exosuit
Oct 10, 2019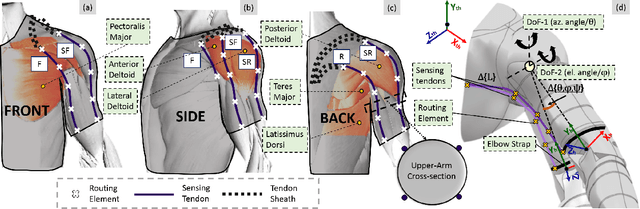
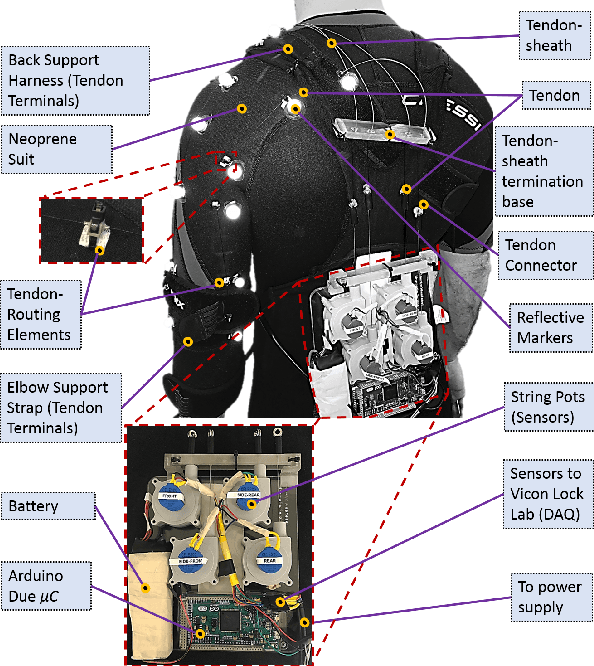
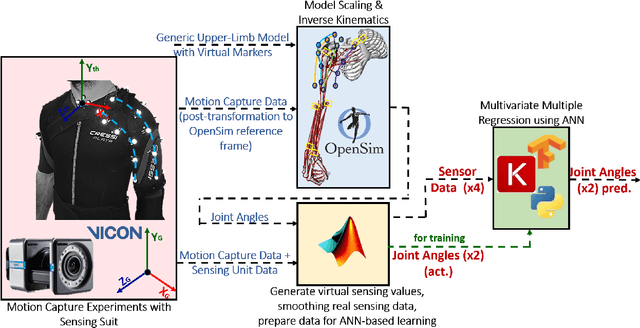
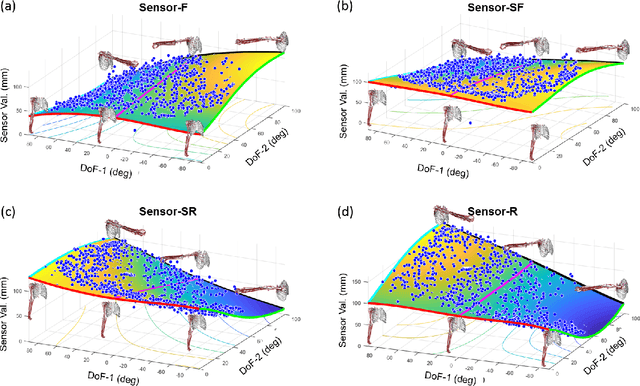
Soft wearable robots are a promising new design paradigm for rehabilitation and active assistance applications. Their compliant nature makes them ideal for complex joints like the shoulder, but intuitive control of these robots require robust and compliant sensing mechanisms. In this work, we introduce the sensing framework for a multi-DoF shoulder exosuit capable of sensing the kinematics of the shoulder joint. The proposed tendon-based sensing system is inspired by the concept of muscle synergies, the body's sense of proprioception, and finds its basis in the organization of the muscles responsible for shoulder movements. A motion-capture-based evaluation of the developed sensing system showed conformance to the behaviour exhibited by the muscles that inspired its routing and validates the hypothesis of the tendon-routing to be extended to the actuation framework of the exosuit in the future. The mapping from multi-sensor space to joint space is a multivariate multiple regression problem and was derived using an Artificial Neural Network (ANN). The sensing framework was tested with a motion-tracking system and achieved performance with root mean square error (RMSE) of approximately 5.43 degrees and 3.65 degrees for the azimuth and elevation joint angles, respectively, measured over 29000 frames (4+ minutes) of motion-capture data.