 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinearity Compensation in a Multi-DoF Shoulder Sensing Exosuit for Real-Time Teleoperation
Feb 21, 2020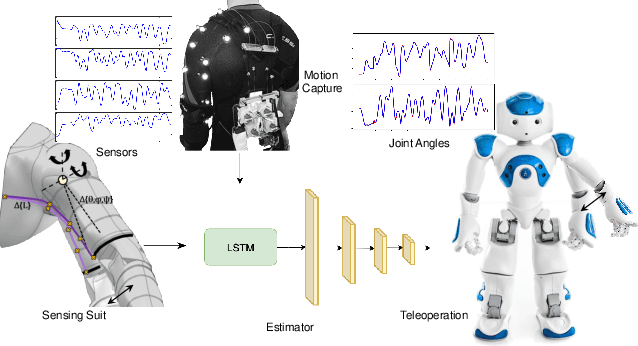

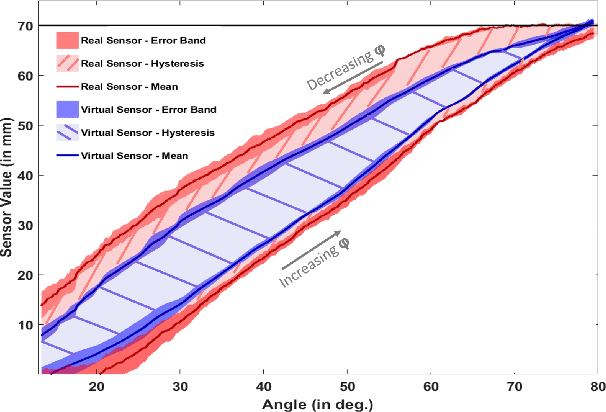
The compliant nature of soft wearable robots makes them ideal for complex multiple degrees of freedom (DoF) joints, but also introduce additional structural nonlinearities. Intuitive control of these wearable robots requires robust sensing to overcome the inherent nonlinearities. This paper presents a joint kinematics estimator for a bio-inspired multi-DoF shoulder exosuit capable of compensating the encountered nonlinearities. To overcome the nonlinearities and hysteresis inherent to the soft and compliant nature of the suit, we developed a deep learning-based method to map the sensor data to the joint space. The experimental results show that the new learning-based framework outperforms recent state-of-the-art methods by a large margin while achieving 12ms inference time using only a GPU-based edge-computing device. The effectiveness of our combined exosuit and learning framework is demonstrated through real-time teleoperation with a simulated NAO humanoid robot.
Design and Prototyping of a Bio-inspired Kinematic Sensing Suit for the Shoulder Joint: Precursor to a Multi-DoF Shoulder Exosuit
Oct 10, 2019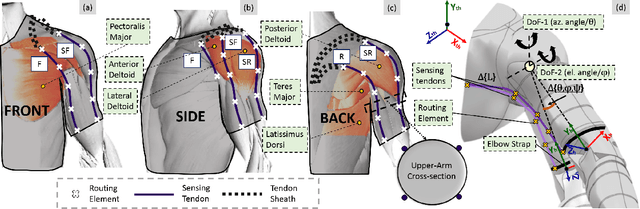
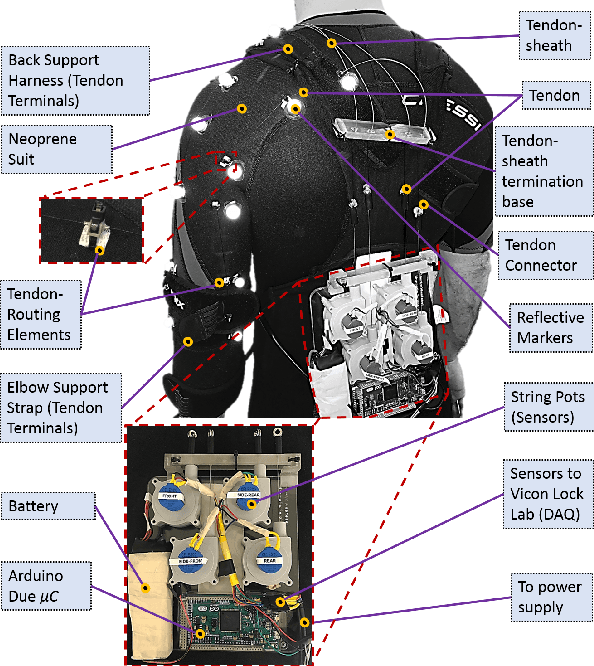
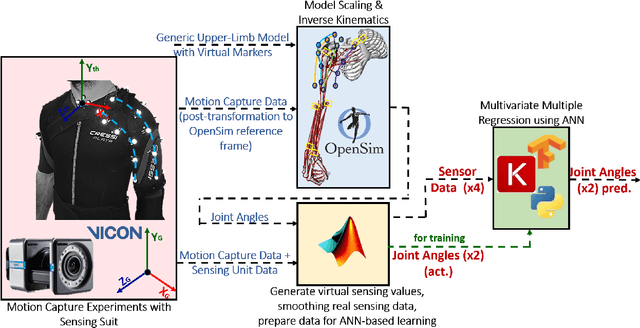
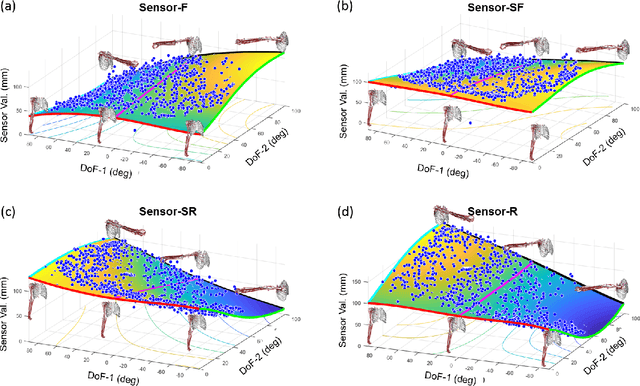
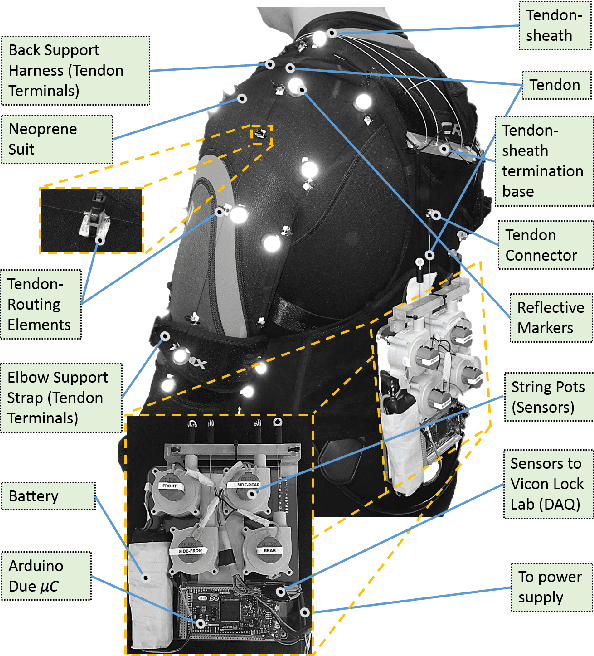
Soft wearable robots are a promising new design paradigm for rehabilitation and active assistance applications. Their compliant nature makes them ideal for complex joints like the shoulder, but intuitive control of these robots require robust and compliant sensing mechanisms. In this work, we introduce the sensing framework for a multi-DoF shoulder exosuit capable of sensing the kinematics of the shoulder joint. The proposed tendon-based sensing system is inspired by the concept of muscle synergies, the body's sense of proprioception, and finds its basis in the organization of the muscles responsible for shoulder movements. A motion-capture-based evaluation of the developed sensing system showed conformance to the behaviour exhibited by the muscles that inspired its routing and validates the hypothesis of the tendon-routing to be extended to the actuation framework of the exosuit in the future. The mapping from multi-sensor space to joint space is a multivariate multiple regression problem and was derived using an Artificial Neural Network (ANN). The sensing framework was tested with a motion-tracking system and achieved performance with root mean square error (RMSE) of approximately 5.43 degrees and 3.65 degrees for the azimuth and elevation joint angles, respectively, measured over 29000 frames (4+ minutes) of motion-capture data.