 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarmonICA: Neural non-stationarity correction and source separation for motor neuron interfaces
Jun 28, 2024A major outstanding problem when interfacing with spinal motor neurons is how to accurately compensate for non-stationary effects in the signal during source separation routines, particularly when they cannot be estimated in advance. This forces current systems to instead use undifferentiated bulk signal, which limits the potential degrees of freedom for control. In this study we propose a potential solution, using an unsupervised learning algorithm to blindly correct for the effects of latent processes which drive the signal non-stationarities. We implement this methodology within the theoretical framework of a quasilinear version of independent component analysis (ICA). The proposed design, HarmonICA, sidesteps the identifiability problems of nonlinear ICA, allowing for equivalent predictability to linear ICA whilst retaining the ability to learn complex nonlinear relationships between non-stationary latents and their effects on the signal. We test HarmonICA on both invasive and non-invasive recordings both simulated and real, demonstrating an ability to blindly compensate for the non-stationary effects specific to each, and thus to significantly enhance the quality of a source separation routine.
Markerless tracking of user-defined features with deep learning
Apr 09, 2018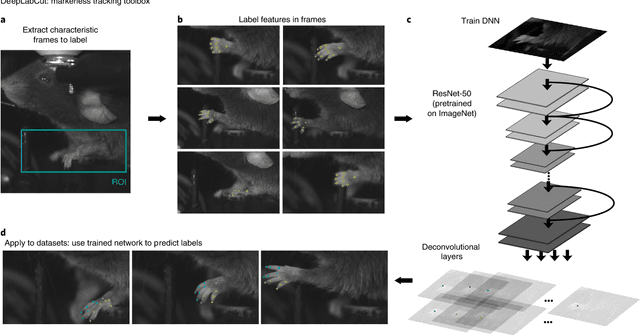
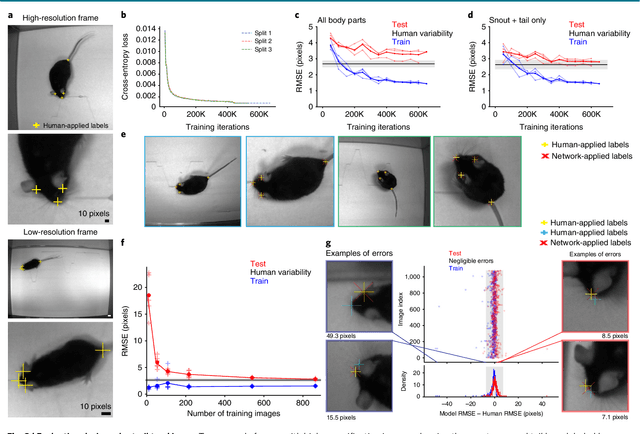
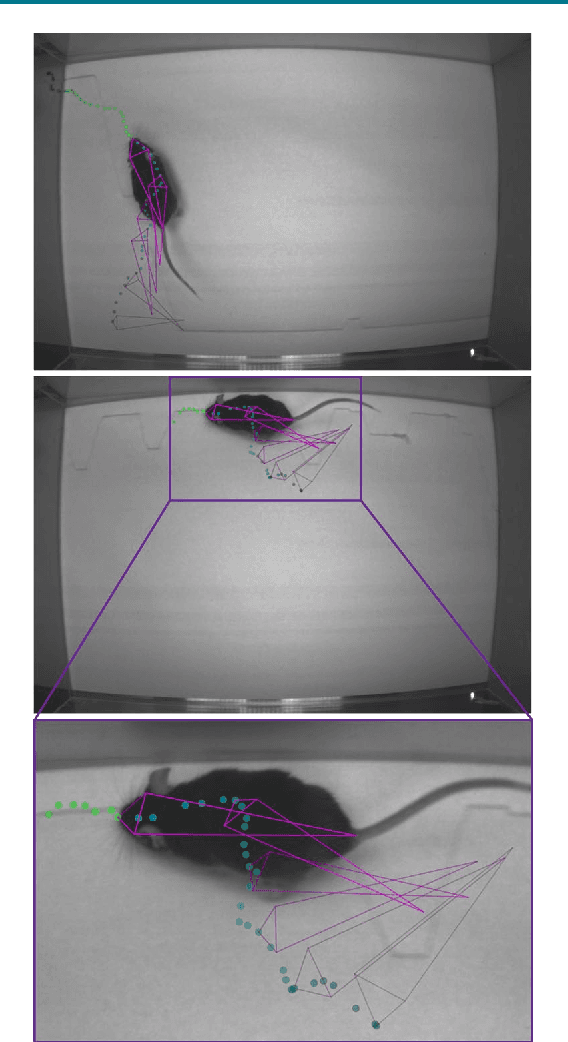
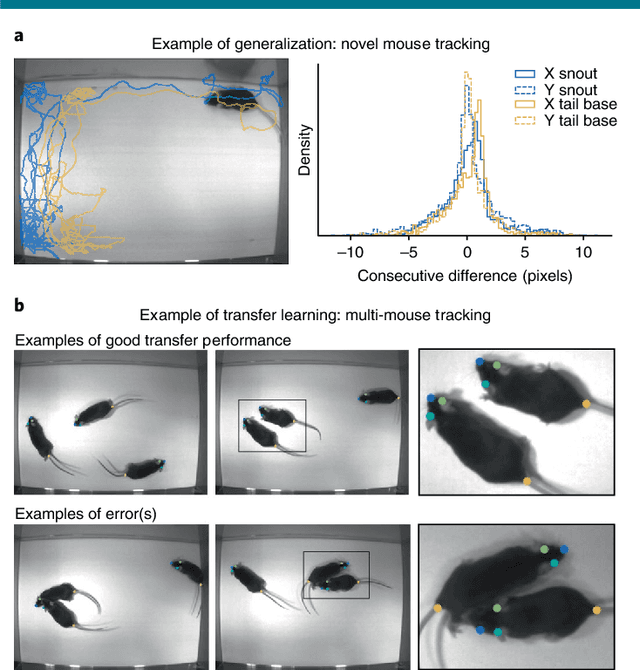
Quantifying behavior is crucial for many applications in neuroscience. Videography provides easy methods for the observation and recording of animal behavior in diverse settings, yet extracting particular aspects of a behavior for further analysis can be highly time consuming. In motor control studies, humans or other animals are often marked with reflective markers to assist with computer-based tracking, yet markers are intrusive (especially for smaller animals), and the number and location of the markers must be determined a priori. Here, we present a highly efficient method for markerless tracking based on transfer learning with deep neural networks that achieves excellent results with minimal training data. We demonstrate the versatility of this framework by tracking various body parts in a broad collection of experimental settings: mice odor trail-tracking, egg-laying behavior in drosophila, and mouse hand articulation in a skilled forelimb task. For example, during the skilled reaching behavior, individual joints can be automatically tracked (and a confidence score is reported). Remarkably, even when a small number of frames are labeled ($\approx 200$), the algorithm achieves excellent tracking performance on test frames that is comparable to human accuracy.
* Videos at http://www.mousemotorlab.org/deeplabcut