 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Set Object Recognition Using Mechanical Properties During Interaction
Nov 02, 2023



while most of the tactile robots are operated in close-set conditions, it is challenging for them to operate in open-set conditions where test objects are beyond the robots' knowledge. We proposed an open-set recognition framework using mechanical properties to recongise known objects and incrementally label novel objects. The main contribution is a clustering algorithm that exploits knowledge of known objects to estimate cluster centre and sizes, unlike a typical algorithm that randomly selects them. The framework is validated with the mechanical properties estimated from a real object during interaction. The results show that the framework could recognise objects better than alternative methods contributed by the novelty detector. Importantly, our clustering algorithm yields better clustering performance than other methods. Furthermore, the hyperparameters studies show that cluster size is important to clustering results and needed to be tuned properly.
Mechanical features based object recognition
Oct 14, 2022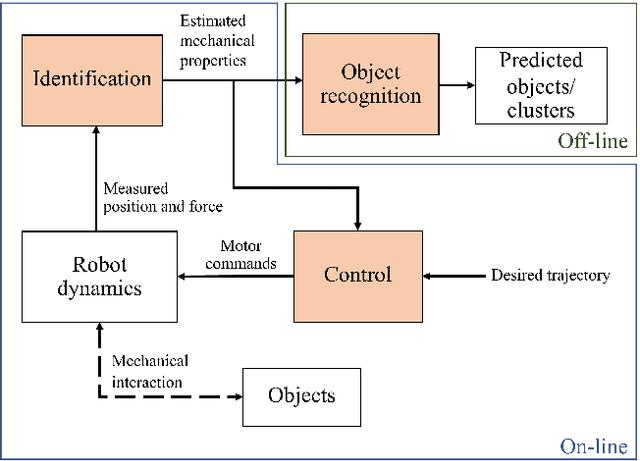
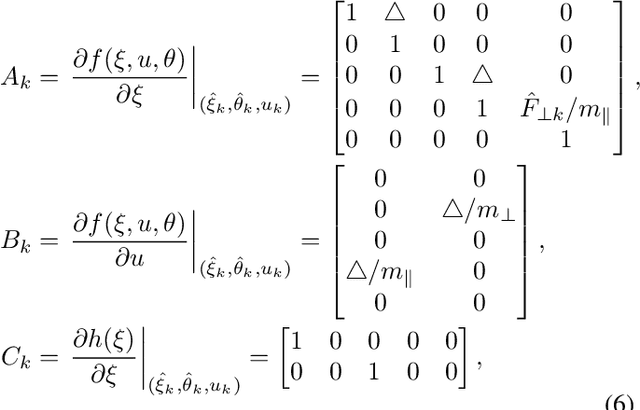
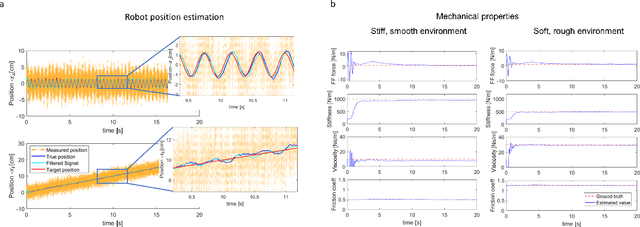
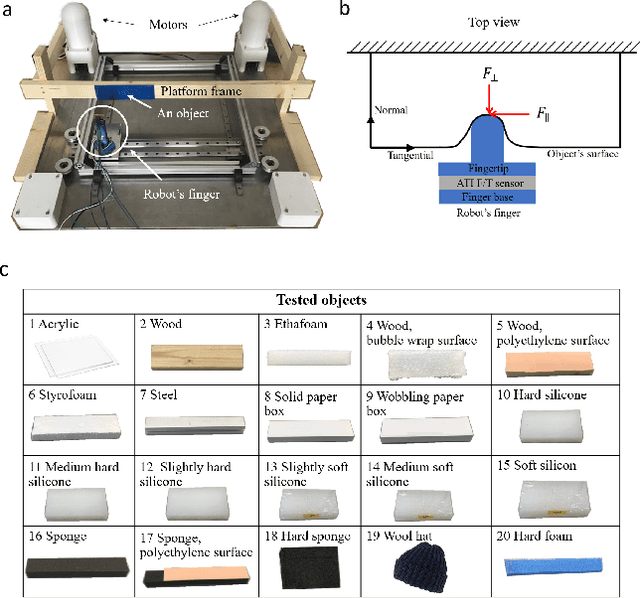
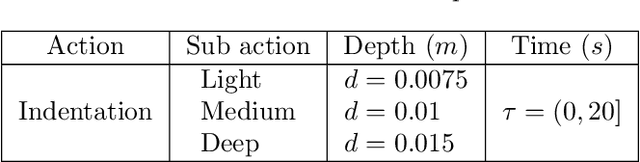
Current robotic haptic object recognition relies on statistical measures derived from movement dependent interaction signals such as force, vibration or position. Mechanical properties that can be identified from these signals are intrinsic object properties that may yield a more robust object representation. Therefore, this paper proposes an object recognition framework using multiple representative mechanical properties: the coefficient of restitution, stiffness, viscosity and friction coefficient. These mechanical properties are identified in real-time using a dual Kalman filter, then used to classify objects. The proposed framework was tested with a robot identifying 20 objects through haptic exploration. The results demonstrate the technique's effectiveness and efficiency, and that all four mechanical properties are required for best recognition yielding a rate of 98.18 $\pm$ 0.424 %. Clustering with Gaussian mixture models further shows that using these mechanical properties results in superior recognition as compared to using statistical parameters of the interaction signals.
Dynamic neuronal networks efficiently achieve classification in robotic interactions with real-world objects
Oct 12, 2022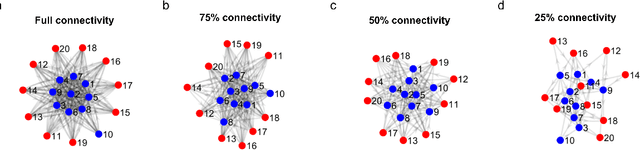
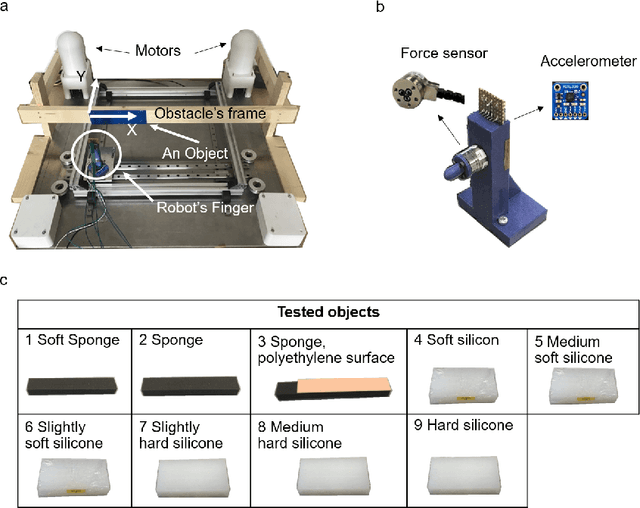
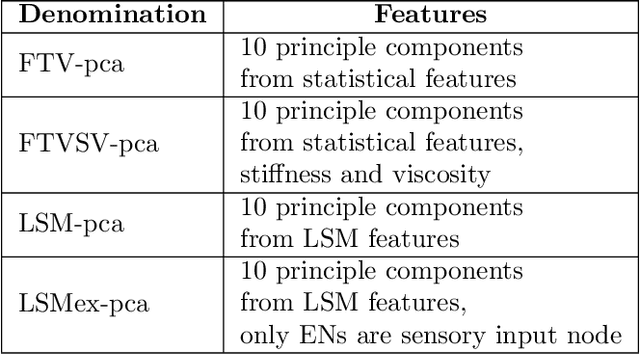
Biological cortical networks are potentially fully recurrent networks without any distinct output layer, where recognition may instead rely on the distribution of activity across its neurons. Because such biological networks can have rich dynamics, they are well-designed to cope with dynamical interactions of the types that occur in nature, while traditional machine learning networks may struggle to make sense of such data. Here we connected a simple model neuronal network (based on the 'linear summation neuron model' featuring biologically realistic dynamics (LSM), consisting of 10 of excitatory and 10 inhibitory neurons, randomly connected) to a robot finger with multiple types of force sensors when interacting with materials of different levels of compliance. Scope: to explore the performance of the network on classification accuracy. Therefore, we compared the performance of the network output with principal component analysis of statistical features of the sensory data as well as its mechanical properties. Remarkably, even though the LSM was a very small and untrained network, and merely designed to provide rich internal network dynamics while the neuron model itself was highly simplified, we found that the LSM outperformed these other statistical approaches in terms of accuracy.
Shared Control for Bimanual Telesurgery with Optimized Robotic Partner
Jul 12, 2021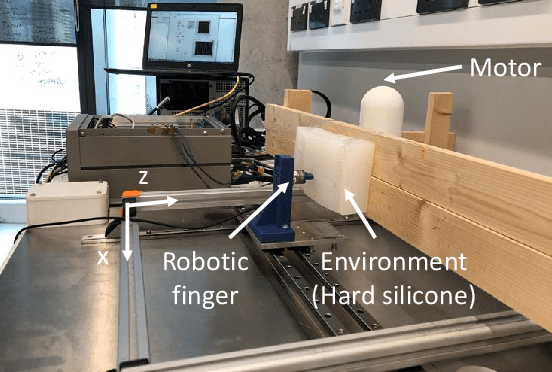
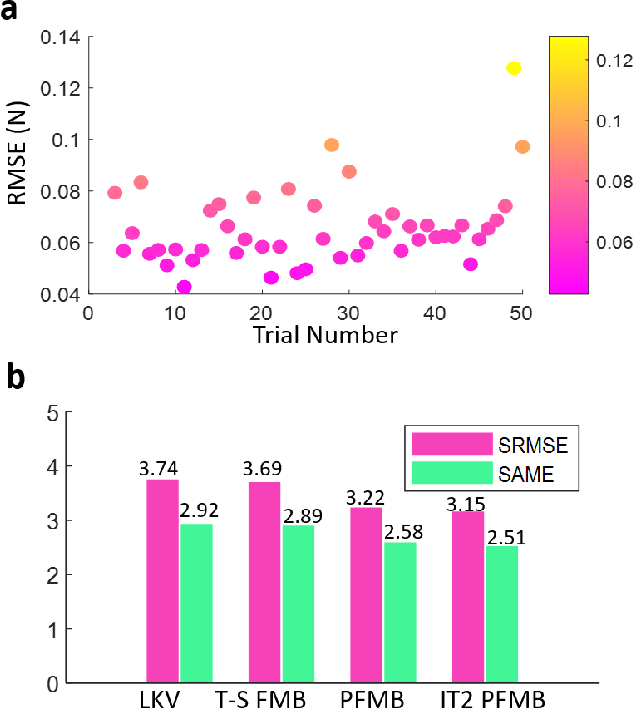
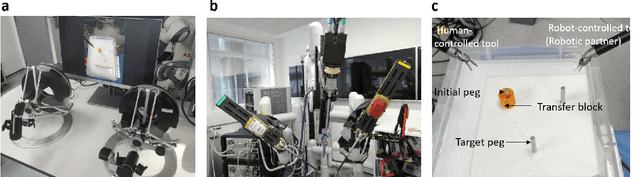
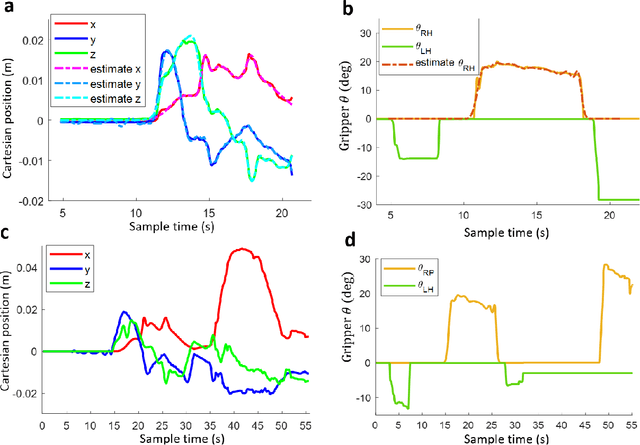
Traditional telesurgery relies on the surgeon's full control of the robot on the patient's side, which tends to increase surgeon fatigue and may reduce the efficiency of the operation. This paper introduces a Robotic Partner (RP) to facilitate intuitive bimanual telesurgery, aiming at reducing the surgeon workload and enhancing surgeon-assisted capability. An interval type-2 polynomial fuzzy-model-based learning algorithm is employed to extract expert domain knowledge from surgeons and reflect environmental interaction information. Based on this, a bimanual shared control is developed to interact with the other robot teleoperated by the surgeon, understanding their control and providing assistance. As prior information of the environment model is not required, it reduces reliance on force sensors in control design. Experimental results on the DaVinci Surgical System show that the RP could assist peg-transfer tasks and reduce the surgeon's workload by 51\% in force-sensor-free scenarios.