 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCathSim: An Open-source Simulator for Autonomous Cannulation
Aug 02, 2022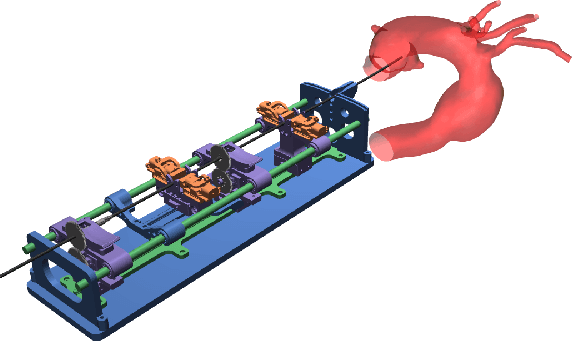
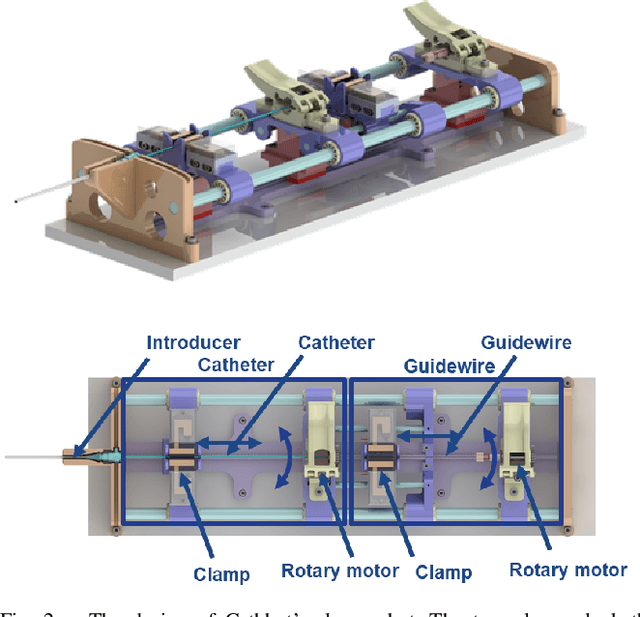
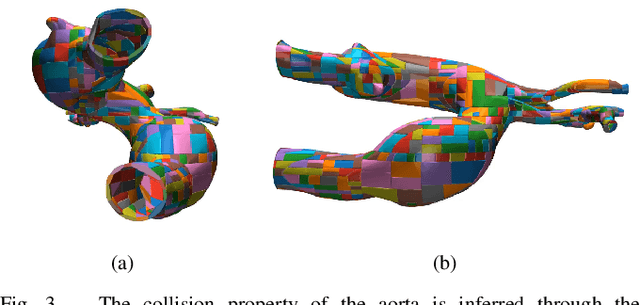
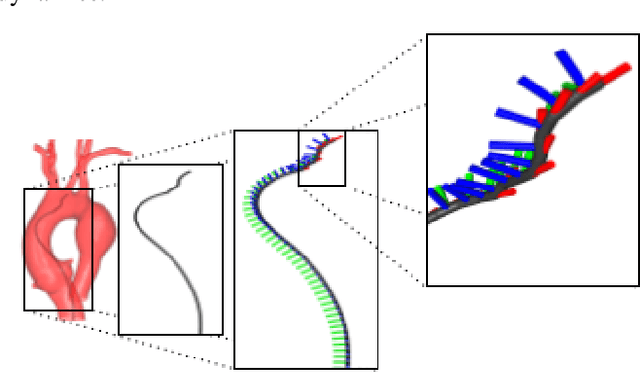
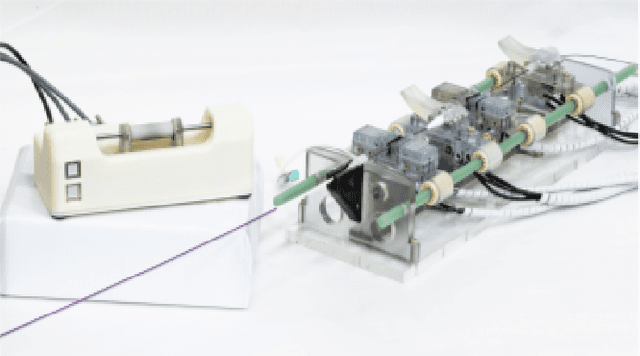
Autonomous robots in endovascular operations have the potential to navigate circulatory systems safely and reliably while decreasing the susceptibility to human errors. However, there are numerous challenges involved with the process of training such robots such as long training duration due to sample inefficiency of machine learning algorithms and safety issues arising from the interaction between the catheter and the endovascular phantom. Physics simulators have been used in the context of endovascular procedures, but they are typically employed for staff training and generally do not conform to the autonomous cannulation goal. Furthermore, most current simulators are closed-source which hinders the collaborative development of safe and reliable autonomous systems. In this work, we introduce CathSim, an open-source simulation environment that accelerates the development of machine learning algorithms for autonomous endovascular navigation. We first simulate the high-fidelity catheter and aorta with the state-of-the-art endovascular robot. We then provide the capability of real-time force sensing between the catheter and the aorta in the simulation environment. We validate our simulator by conducting two different catheterisation tasks within two primary arteries using two popular reinforcement learning algorithms, Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC). The experimental results show that using our open-source simulator, we can successfully train the reinforcement learning agents to perform different autonomous cannulation tasks.
End-to-End Real-time Catheter Segmentation with Optical Flow-Guided Warping during Endovascular Intervention
Jun 16, 2020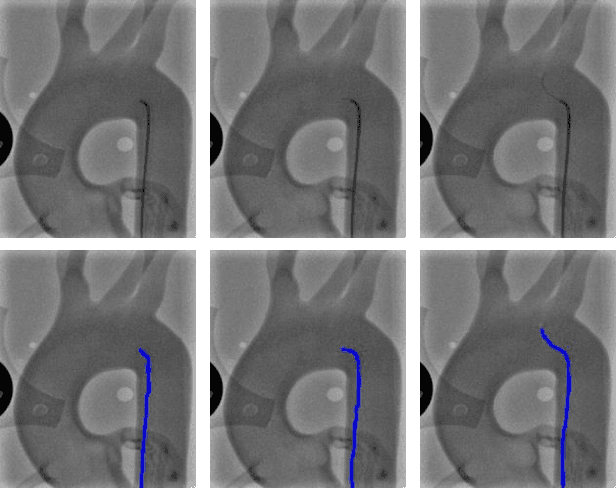
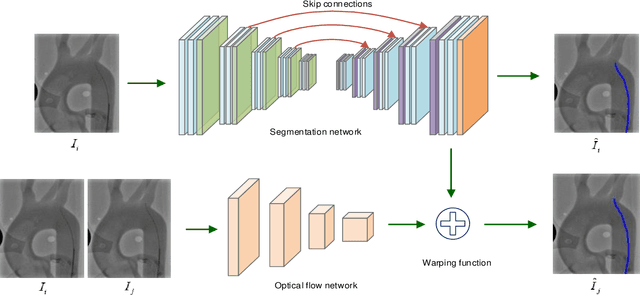
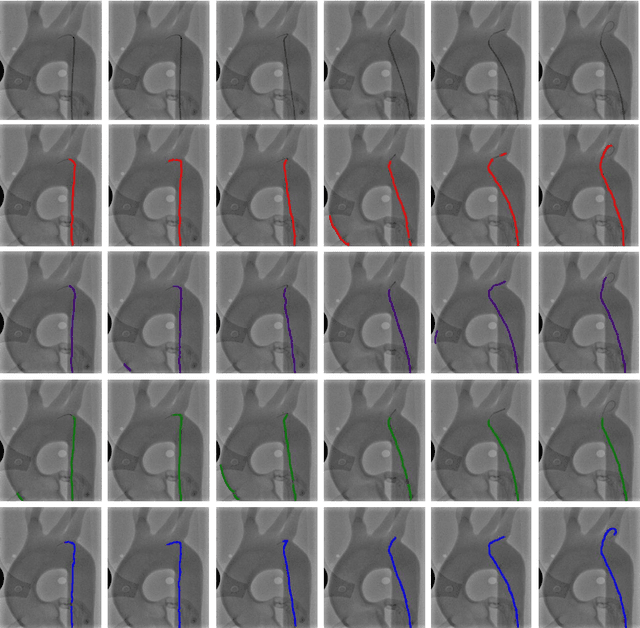
Accurate real-time catheter segmentation is an important pre-requisite for robot-assisted endovascular intervention. Most of the existing learning-based methods for catheter segmentation and tracking are only trained on small-scale datasets or synthetic data due to the difficulties of ground-truth annotation. Furthermore, the temporal continuity in intraoperative imaging sequences is not fully utilised. In this paper, we present FW-Net, an end-to-end and real-time deep learning framework for endovascular intervention. The proposed FW-Net has three modules: a segmentation network with encoder-decoder architecture, a flow network to extract optical flow information, and a novel flow-guided warping function to learn the frame-to-frame temporal continuity. We show that by effectively learning temporal continuity, the network can successfully segment and track the catheters in real-time sequences using only raw ground-truth for training. Detailed validation results confirm that our FW-Net outperforms state-of-the-art techniques while achieving real-time performance.