 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention on the Wires (AttWire): A Foundation Model for Detecting Devices and Catheters in X-ray Fluoroscopic Images
Mar 08, 2025Objective: Interventional devices, catheters and insertable imaging devices such as transesophageal echo (TOE) probes are routinely used in minimally invasive cardiovascular procedures. Detecting their positions and orientations in X-ray fluoroscopic images is important for many clinical applications. Method: In this paper, a novel attention mechanism was designed to guide a convolution neural network (CNN) model to the areas of wires in X-ray images, as nearly all interventional devices and catheters used in cardiovascular procedures contain wires. The attention mechanism includes multi-scale Gaussian derivative filters and a dot-product-based attention layer. By utilizing the proposed attention mechanism, a lightweight foundation model can be created to detect multiple objects simultaneously with higher precision and real-time speed. Results: The proposed model was trained and tested on a total of 12,438 X-ray images. An accuracy of 0.88 was achieved for detecting an echo probe and 0.87 for detecting an artificial valve at 58 FPS. The accuracy was measured by intersection-over-union (IoU). We also achieved a 99.8% success rate in detecting a 10-electrode catheter and a 97.8% success rate in detecting an ablation catheter. Conclusion: Our detection foundation model can simultaneously detect and identify both interventional devices and flexible catheters in real-time X-ray fluoroscopic images. Significance: The proposed model employs a novel attention mechanism to achieve high-performance object detection, making it suitable for various clinical applications and robotic-assisted surgeries. Codes are available at https://github.com/YingLiangMa/AttWire.
End-to-End Real-time Catheter Segmentation with Optical Flow-Guided Warping during Endovascular Intervention
Jun 16, 2020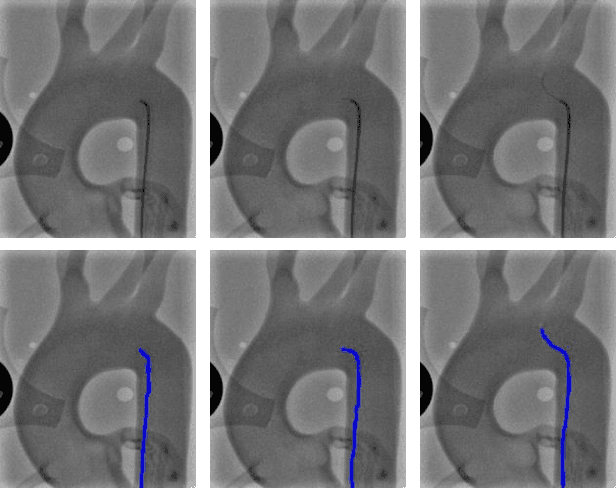
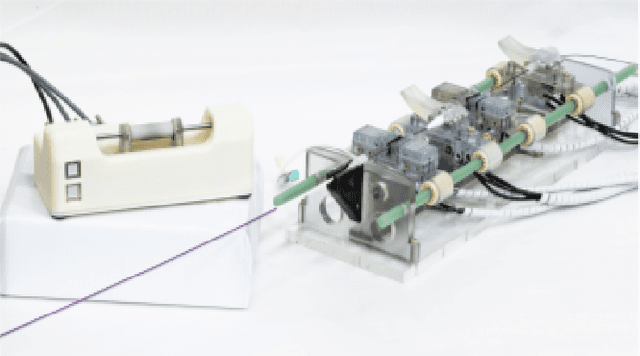
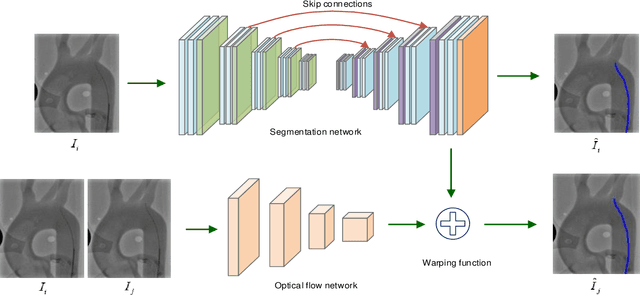
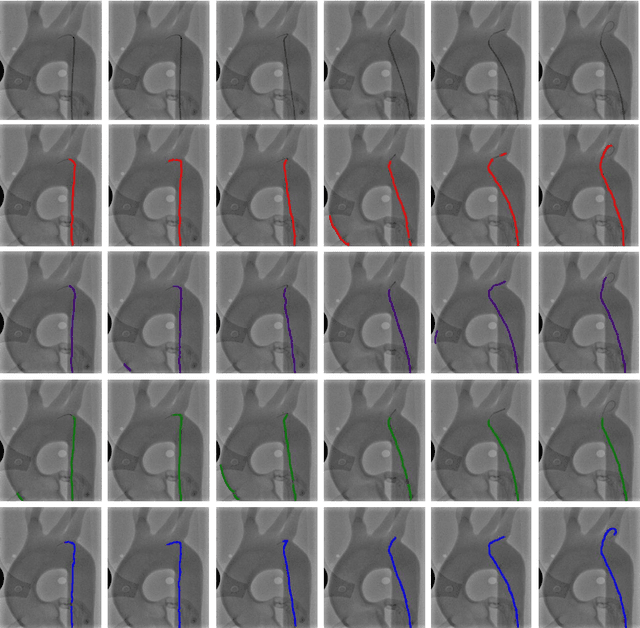
Accurate real-time catheter segmentation is an important pre-requisite for robot-assisted endovascular intervention. Most of the existing learning-based methods for catheter segmentation and tracking are only trained on small-scale datasets or synthetic data due to the difficulties of ground-truth annotation. Furthermore, the temporal continuity in intraoperative imaging sequences is not fully utilised. In this paper, we present FW-Net, an end-to-end and real-time deep learning framework for endovascular intervention. The proposed FW-Net has three modules: a segmentation network with encoder-decoder architecture, a flow network to extract optical flow information, and a novel flow-guided warping function to learn the frame-to-frame temporal continuity. We show that by effectively learning temporal continuity, the network can successfully segment and track the catheters in real-time sequences using only raw ground-truth for training. Detailed validation results confirm that our FW-Net outperforms state-of-the-art techniques while achieving real-time performance.