 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-the-fly hand-eye calibration for the da Vinci surgical robot
Jan 21, 2026In Robot-Assisted Minimally Invasive Surgery (RMIS), accurate tool localization is crucial to ensure patient safety and successful task execution. However, this remains challenging for cable-driven robots, such as the da Vinci robot, because erroneous encoder readings lead to pose estimation errors. In this study, we propose a calibration framework to produce accurate tool localization results through computing the hand-eye transformation matrix on-the-fly. The framework consists of two interrelated algorithms: the feature association block and the hand-eye calibration block, which provide robust correspondences for key points detected on monocular images without pre-training, and offer the versatility to accommodate various surgical scenarios by adopting an array of filter approaches, respectively. To validate its efficacy, we test the framework extensively on publicly available video datasets that feature multiple surgical instruments conducting tasks in both in vitro and ex vivo scenarios, under varying illumination conditions and with different levels of key point measurement accuracy. The results show a significant reduction in tool localization errors under the proposed calibration framework, with accuracies comparable to other state-of-the-art methods while being more time-efficient.
Caveats on the first-generation da Vinci Research Kit: latent technical constraints and essential calibrations
Oct 24, 2022
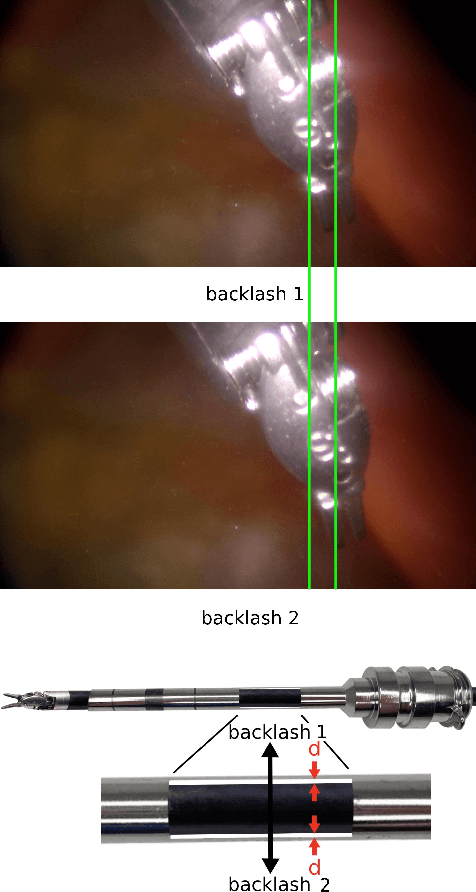


Telesurgical robotic systems provide a well established form of assistance in the operating theater, with evidence of growing uptake in recent years. Until now, the da Vinci surgical system (Intuitive Surgical Inc, Sunnyvale, California) has been the most widely adopted robot of this kind, with more than 6,700 systems in current clinical use worldwide. To accelerate research on robotic-assisted surgery, the retired first-generation da Vinci robots have been redeployed for research use as "da Vinci Research Kits" (dVRKs), which have been distributed to research institutions around the world to support both training and research in the sector. In the past ten years, a great amount of research on the dVRK has been carried out across a vast range of research topics. During this extensive and distributed process, common technical issues have been identified that are buried deep within the dVRK research and development architecture, and were found to be common among dVRK user feedback, regardless of the breadth and disparity of research directions identified. This paper gathers and analyzes the most significant of these, with a focus on the technical constraints of the first-generation dVRK, which both existing and prospective users should be aware of before embarking onto dVRK-related research. The hope is that this review will aid users in identifying and addressing common limitations of the systems promptly, thus helping to accelerate progress in the field.