 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOFDM-Based ISAC Imaging of Extended Targets via Inverse Virtual Aperture Processing
Jan 23, 2026This work investigates the performance of an integrated sensing and communication (ISAC) system exploiting inverse virtual aperture (IVA) for imaging moving extended targets in vehicular scenarios. A base station (BS) operates as a monostatic sensor using MIMO-OFDM waveforms. Echoes reflected by the target are processed through motion-compensation techniques to form an IVA range-Doppler (cross-range) image. A case study considers a 5G NR waveform in the upper mid-band, with the target model defined in 3GPP Release 19, representing a vehicle as a set of spatially distributed scatterers. Performance is evaluated in terms of image contrast (IC) and the root mean squared error (RMSE) of the estimated target-centroid range. Finally, the trade-off between sensing accuracy and communication efficiency is examined by varying the subcarrier allocation for IVA imaging. The results provide insights for designing effective sensing strategies in next-generation radio networks.
Joint Target Acquisition and Refined Position Estimation in OFDM-based ISAC Networks
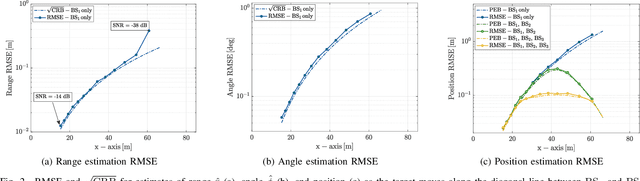
Jul 09, 2025This paper addresses joint target acquisition and position estimation in an OFDM-based integrated sensing and communication (ISAC) network with base station (BS) cooperation via a fusion center. A two-stage framework is proposed: in the first stage, each BS computes range-angle maps to detect targets and estimate coarse positions, exploiting spatial diversity. In the second stage, refined localization is performed using a cooperative maximum likelihood (ML) estimator over predefined regions of interest (RoIs) within a shared global reference frame. Numerical results demonstrate that the proposed approach not only improves detection performance through BS cooperation but also achieves centimeter-level localization accuracy, highlighting the effectiveness of the refined estimation technique.
Position and Velocity Estimation Accuracy in MIMO-OFDM ISAC Networks: A Fisher Information Analysis
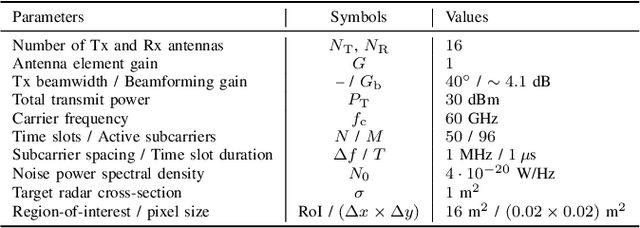
Jul 02, 2025Integrated sensing and communication (ISAC) is a core technology for future wireless networks, enabling high-resolution sensing and reliable data transmission within a unified radio platform. This paper develops a theoretical framework to assess the estimation accuracy of target position and velocity in heterogeneous orthogonal frequency division multiplexing (OFDM)-based ISAC networks with multiple cooperative and distributed multiple-input multiple-output (MIMO) base stations (BSs). Using Fisher information analysis, we first derive closed-form Cram\'er-Rao lower bounds (CRLBs) for target localization in single monostatic and bistatic configurations. We then analyze the benefits of BS cooperation by deriving CRLBs for joint position and velocity estimation in a general setting that encompasses multiple cooperating monostatic systems and multistatic networks with multiple transmitters (Txs) and receivers (Rxs). The influence of key system parameters, including the number of BSs, bandwidth, antenna array configuration, and network geometry, is systematically examined. Numerical results highlight the performance gains enabled by cooperative sensing and provide insights to guide the design of future ISAC systems.
Multi-Target Acquisition in Multistatic MIMO-OFDM Joint Sensing and Communication
Mar 28, 2025



In this work, we investigate a multistatic MIMO-OFDM joint sensing and communication (JSC) system that leverages cooperation among spatially distributed base stations (BSs) to detect and localize multiple targets through soft fusion of range-angle maps. We propose an innovative selective data fusion strategy that combines only the most reliable regions of range-angle maps from each bistatic pair, mitigating the adverse effects of residual clutter and target smearing inherent to bistatic configurations. To further enhance multi-view perception, we introduce a round-robin transmitter role strategy, enabling BSs to cooperate and exploit target spatial diversity. Finally, we assess the system performance in a cluttered environment using the generalized optimal subpattern assignment (GOSPA) and root mean squared error (RMSE) metrics, demonstrating the effectiveness of our approaches in improving detection and localization.
Cooperative Maximum Likelihood Target Position Estimation for MIMO-ISAC Networks
Nov 07, 2024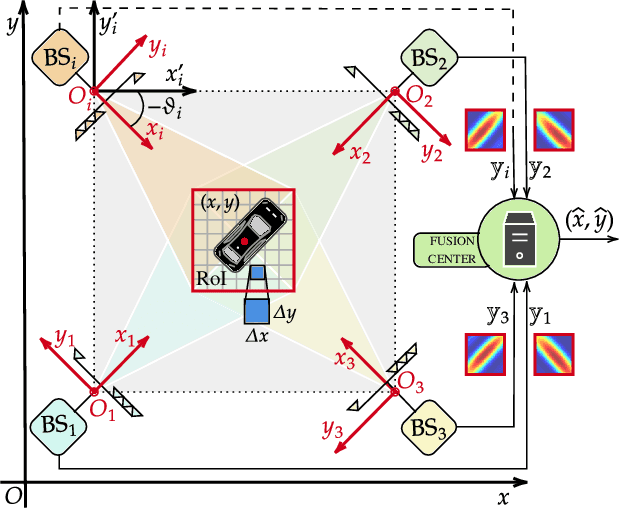
This letter investigates target position estimation in integrated sensing and communications (ISAC) networks composed of multiple cooperating monostatic base stations (BSs). Each BS employs a MIMO-orthogonal time-frequency space (OTFS) scheme, enabling the coexistence of communication and sensing. A general cooperative maximum likelihood (ML) framework is derived, directly estimating the target position in a common reference system rather than relying on local range and angle estimates at each BS. Positioning accuracy is evaluated in single-target scenarios by varying the number of collaborating BSs, using root mean square error (RMSE), and comparing against the Cram\'er-Rao lower bound. Numerical results demonstrate that the ML framework significantly reduces the position RMSE as the number of cooperating BSs increases.
Jamming Detection in MIMO-OFDM ISAC Systems Using Variational Autoencoders
Oct 02, 2024


This paper introduces a novel unsupervised jamming detection framework designed specifically for monostatic multiple-input multiple-output (MIMO)-orthogonal frequency-division multiplexing (OFDM) radar systems. The framework leverages echo signals captured at the base station (BS) and employs the latent data representation learning capability of variational autoencoders (VAEs). The VAE-based detector is trained on echo signals received from a real target in the absence of jamming, enabling it to learn an optimal latent representation of normal network operation. During testing, in the presence of a jammer, the detector identifies anomalous signals by their inability to conform to the learned latent space. We assess the performance of the proposed method in a typical integrated sensing and communication (ISAC)-enabled 5G wireless network, even comparing it with a conventional autoencoder.
Position Error Bound for Cooperative Sensing in MIMO-OFDM Networks
May 30, 2024Only the chairs can edit This paper investigates the fundamental limits of target position estimation accuracy of joint sensing and communication (JSC) networks comprising several monostatic base stations (BSs) that cooperate to localize targets. Specifically, each BS adopts a multiple-input multiple-output (MIMO)-orthogonal frequency division multiplexing (OFDM) scheme with a multi-beam radiation pattern to partition power between communication and sensing tasks. Building on prior works, we derive a general framework to evaluate the positioning accuracy of a target in networks with an arbitrary number of cooperating BSs and arbitrary geometrical configurations using Fisher information. Numerical results demonstrate the benefits of cooperation between BSs in improving target localization accuracy and provide insights into the relationships between various system parameters, which may aid in designing JSC networks.
Bistatic Sensing at THz Frequencies via a Two-Stage Ultra-Wideband MIMO-OFDM System
May 28, 2024Only the chairs can edit The availability of abundant bandwidth at terahertz (THz) frequencies holds promise for significantly enhancing the sensing performance of integrated sensing and communication (ISAC) systems in the next-generation wireless systems, enabling high accuracy and resolution for precise target localization. In orthogonal frequency-division multiplexing (OFDM) systems, wide bandwidth can be achieved by increasing the subcarrier spacing rather than the number of subcarriers, thereby keeping the complexity of the sensing system low. However, this approach may lead to an ambiguity problem in target range estimation. To address this issue, this work proposes a two-stage maximum likelihood method for estimating target position in an ultra-wideband bistatic multiple-antenna OFDM-based ISAC system operating at THz frequencies. Numerical results show that the proposed estimation approach effectively resolves the ambiguity problem while achieving high resolution and accuracy target position estimation at a very low signal-to-noise ratio regime.
Fundamental Trade-Offs in Monostatic ISAC: A Holistic Investigation Towards 6G
Jan 31, 2024



Integrated sensing and communication (ISAC) emerges as a cornerstone technology for the upcoming 6G era, seamlessly incorporating sensing functionality into wireless networks as an inherent capability. This paper undertakes a holistic investigation of two fundamental trade-offs in monostatic OFDM ISAC systems-namely, the time-frequency domain trade-off and the spatial domain trade-off. To ensure robust sensing across diverse modulation orders in the time-frequency domain, including high-order QAM, we design a linear minimum mean-squared-error (LMMSE) estimator tailored for sensing with known, randomly generated signals of varying amplitude. Moreover, we explore spatial domain trade-offs through two ISAC transmission strategies: concurrent, employing joint beams, and time-sharing, using separate, time-non-overlapping beams for sensing and communications. Simulations demonstrate superior performance of the LMMSE estimator in detecting weak targets in the presence of strong ones under high-order QAM, consistently yielding more favorable ISAC trade-offs than existing baselines. Key insights into these trade-offs under various modulation schemes, SNR conditions, target radar cross section (RCS) levels and transmission strategies highlight the merits of the proposed LMMSE approach.
Sensor Fusion and Resource Management in MIMO-OFDM Joint Sensing and Communication
Dec 12, 2023This study explores the promising potential of integrating sensing capabilities into multiple-input multiple-output (MIMO)-orthogonal frequency division multiplexing (OFDM)-based networks through innovative multi-sensor fusion techniques, tracking algorithms, and resource management. A novel data fusion technique is proposed within the MIMO-OFDM system, which promotes cooperative sensing among monostatic joint sensing and communication (JSC) base stations by sharing range-angle maps with a central fusion center. To manage data sharing and control network overhead introduced by cooperation, an excision filter is introduced at each base station. After data fusion, the framework employs a three-step clustering procedure combined with a tracking algorithm to effectively handle point-like and extended targets. Delving into the sensing/communication trade-off, resources such as transmit power, frequency, and time are varied, providing valuable insights into their impact on the overall system performance. Additionally, a sophisticated channel model is proposed, accounting for complex urban propagation scenarios and addressing multipath effects and multiple reflection points for extended targets like vehicles. Evaluation metrics, including optimal sub-pattern assignment (OSPA), downlink sum rate, and bit rate, offer a comprehensive assessment of the system's localization and communication capabilities, as well as network overhead.