 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Maximum Likelihood Target Position Estimation for MIMO-ISAC Networks
Paper and Code
Nov 07, 2024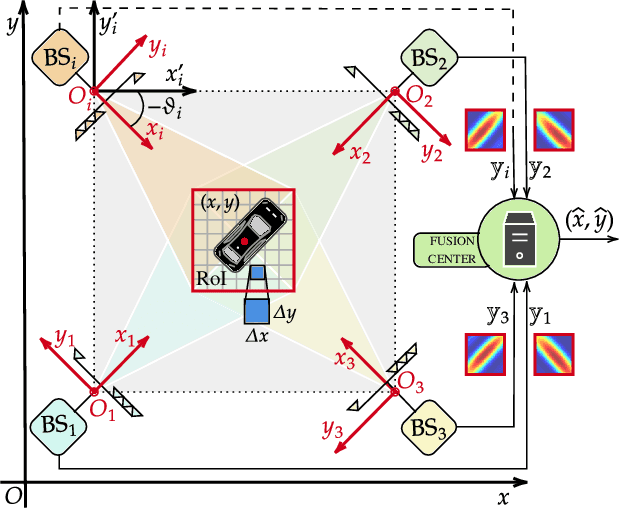
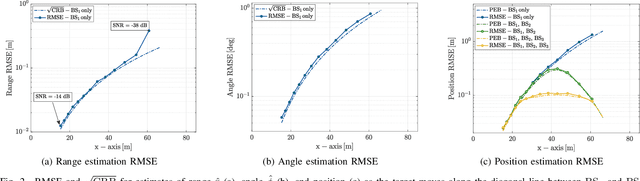
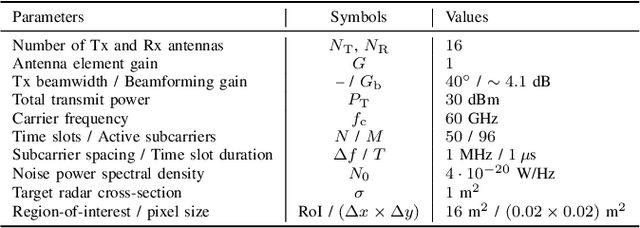
This letter investigates target position estimation in integrated sensing and communications (ISAC) networks composed of multiple cooperating monostatic base stations (BSs). Each BS employs a MIMO-orthogonal time-frequency space (OTFS) scheme, enabling the coexistence of communication and sensing. A general cooperative maximum likelihood (ML) framework is derived, directly estimating the target position in a common reference system rather than relying on local range and angle estimates at each BS. Positioning accuracy is evaluated in single-target scenarios by varying the number of collaborating BSs, using root mean square error (RMSE), and comparing against the Cram\'er-Rao lower bound. Numerical results demonstrate that the ML framework significantly reduces the position RMSE as the number of cooperating BSs increases.