 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Maximum Likelihood Target Position Estimation for MIMO-ISAC Networks
Nov 07, 2024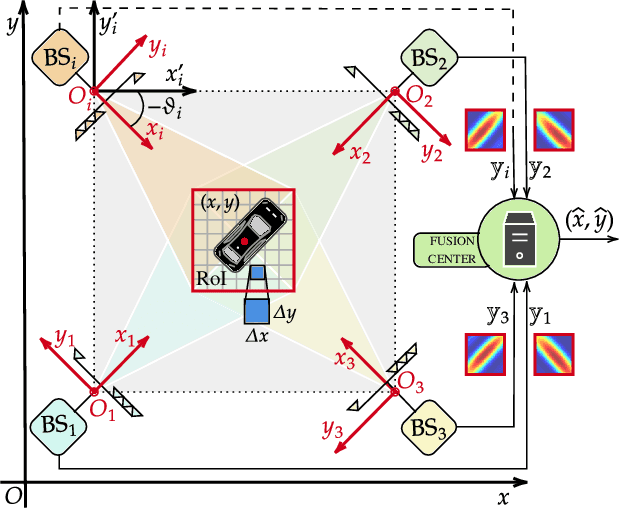
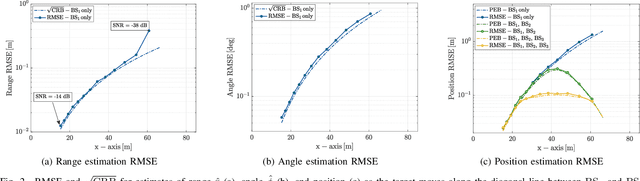
This letter investigates target position estimation in integrated sensing and communications (ISAC) networks composed of multiple cooperating monostatic base stations (BSs). Each BS employs a MIMO-orthogonal time-frequency space (OTFS) scheme, enabling the coexistence of communication and sensing. A general cooperative maximum likelihood (ML) framework is derived, directly estimating the target position in a common reference system rather than relying on local range and angle estimates at each BS. Positioning accuracy is evaluated in single-target scenarios by varying the number of collaborating BSs, using root mean square error (RMSE), and comparing against the Cram\'er-Rao lower bound. Numerical results demonstrate that the ML framework significantly reduces the position RMSE as the number of cooperating BSs increases.
Bistatic Sensing at THz Frequencies via a Two-Stage Ultra-Wideband MIMO-OFDM System
May 28, 2024Only the chairs can edit The availability of abundant bandwidth at terahertz (THz) frequencies holds promise for significantly enhancing the sensing performance of integrated sensing and communication (ISAC) systems in the next-generation wireless systems, enabling high accuracy and resolution for precise target localization. In orthogonal frequency-division multiplexing (OFDM) systems, wide bandwidth can be achieved by increasing the subcarrier spacing rather than the number of subcarriers, thereby keeping the complexity of the sensing system low. However, this approach may lead to an ambiguity problem in target range estimation. To address this issue, this work proposes a two-stage maximum likelihood method for estimating target position in an ultra-wideband bistatic multiple-antenna OFDM-based ISAC system operating at THz frequencies. Numerical results show that the proposed estimation approach effectively resolves the ambiguity problem while achieving high resolution and accuracy target position estimation at a very low signal-to-noise ratio regime.
Performance Analysis of a Low-Complexity OTFS Integrated Sensing and Communication System
Oct 16, 2023

This work proposes a low-complexity estimation approach for an orthogonal time frequency space (OTFS)-based integrated sensing and communication (ISAC) system. In particular, we first define four low-dimensional matrices used to compute the channel matrix through simple algebraic manipulations. Secondly, we establish an analytical criterion, independent of system parameters, to identify the most informative elements within these derived matrices, leveraging the properties of the Dirichlet kernel. This allows the distilling of such matrices, keeping only those entries that are essential for detection, resulting in an efficient, low-complexity implementation of the sensing receiver. Numerical results, which refer to a vehicular scenario, demonstrate that the proposed approximation technique effectively preserves the sensing performance, evaluated in terms of root mean square error (RMSE) of the range and velocity estimation, while concurrently reducing the computational effort enormously.