 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtensible Hook System for Rendesvouz and Docking of a Cubesat Swarm
Mar 27, 2024


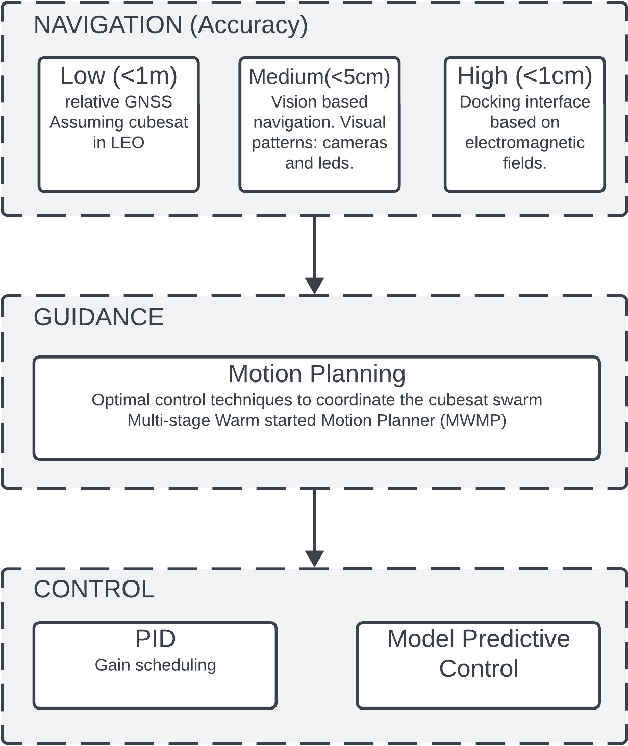
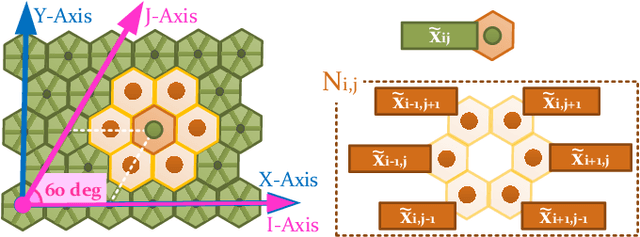
The use of cubesat swarms is being proposed for different missions where cooperation between satellites is required. Commonly, the cube swarm requires formation flight and even rendezvous and docking, which are very challenging tasks since they required more energy and the use of advanced guidance, navigation and control techniques. In this paper, we propose the use of an extensible hook system to mitigate these drawbacks,i.e. it allows to save fuel and reduce the system complexity by including techniques that have been previously demonstrated on Earth. This system is based on a scissor boom structure, which could reach up to five meters for a 4U dimension, including three degrees of freedom to place the end effector at any pose within the system workspace. We simulated the dynamic behaviour of a cubesat with the proposed system, demonstrating the required power for a 16U cubesat equipped with one extensible hook system is considered acceptable according to the current state of the art actuators.
Thermal Vision for Soil Assessment in a Multipurpose Environmental Chamber under Martian Conditions towards Robot Navigation
Apr 26, 2023



Soil assessment is important for mobile robot planning and navigation on natural and planetary environments. Terramechanic characteristics can be inferred from the thermal behaviour of soils under the influence of sunlight using remote sensors such as Long-Wave Infrared cameras. However, this behaviour is greatly affected by the low atmospheric pressures of planets such as Mars, so practical models are needed to relate robot remote sensing data on Earth to target planetary exploration conditions. This article proposes a general framework based on multipurpose environmental chambers to generate representative diurnal cycle dataset pairs that can be useful to relate the thermal behaviour of a soil on Earth to the corresponding behaviour under planetary pressure conditions using remote sensing. Furthermore, we present an application of the proposed framework to generate datasets using the UMA-Laserlab chamber, which can replicate the atmospheric \ch{CO2} composition of Mars. In particular, we analyze the thermal behaviour of four soil samples of different granularity by comparing replicated Martian surface conditions and their Earth's diurnal cycle equivalent. Results indicate a correlation between granularity and thermal inertia that is consistent with available Mars surface measurements recorded by rovers. The resulting dataset pairs, consisting of representative diurnal cycle thermal images with heater, air, and subsurface temperatures, have been made available for the scientific community.
Optimal Path Planning using CAMIS: a Continuous Anisotropic Model for Inclined Surfaces
Mar 05, 2021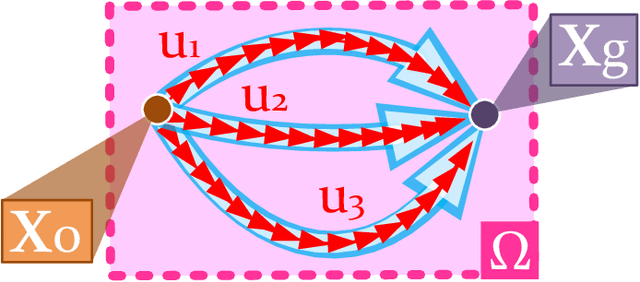


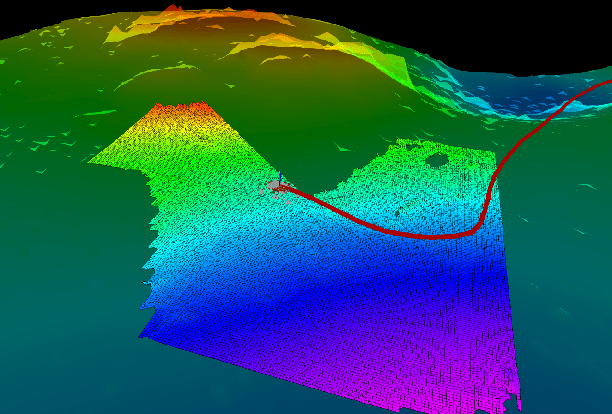
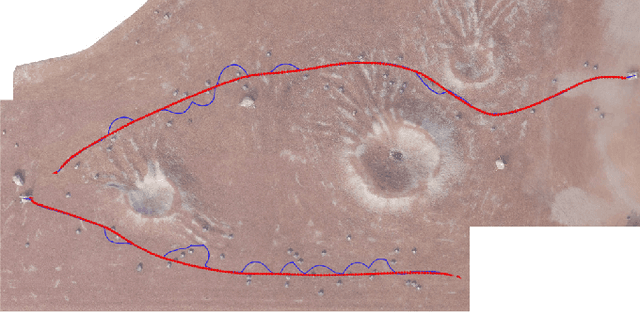
The optimal traverse of irregular terrains made by ground mobile robots heavily depends on the adequacy of the cost models used to plan the path they follow. The criteria to define optimality may be based on minimizing energy consumption and/or preserving the robot stability. This entails the proper assessment of anisotropy to account for the robot driving on top of slopes with different directions. To fulfill this demand, this paper presents the Continuous Anisotropic Model for Inclined Surfaces, a cost model compatible with anisotropic path planners like the bi-directional Ordered Upwind Method. This model acknowledges how the orientation of the robot with respect to any slope determines its energetic cost, considering the action of gravity and terramechanic effects such as the slippage. Moreover, the proposed model can be tuned to define a trade-off between energy minimization and Roll angle reduction. The results from two simulation tests demonstrate how, to find the optimal path in scenarios containing slopes, in certain situations the use of this model can be more advantageous than relying on isotropic cost functions. Finally, the outcome of a field experiment involving a skid-steering robot that drives on top of a real slope is also discussed.
A surgical dataset from the da Vinci Research Kit for task automation and recognition
Feb 06, 2021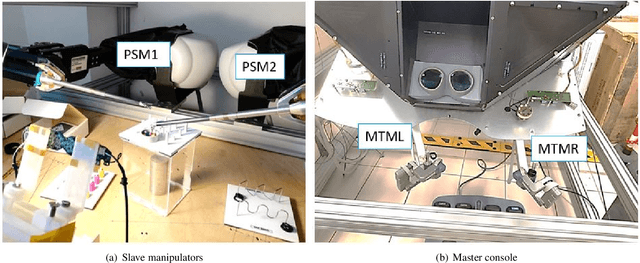
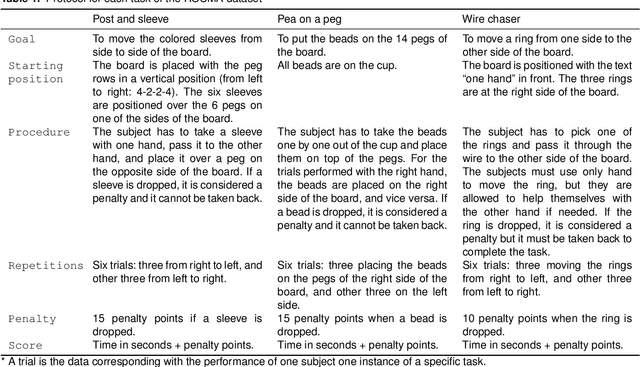
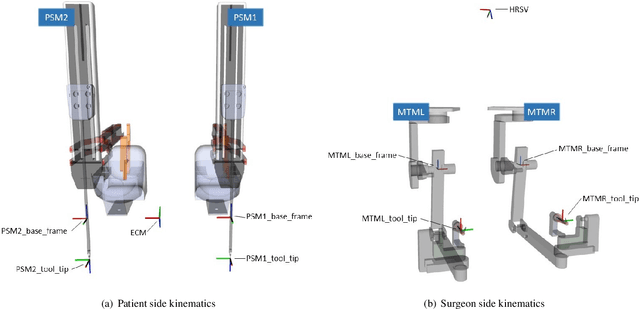

The use of datasets is getting more relevance in surgical robotics since they can be used to recognise and automate tasks. Also, this allows to use common datasets to compare different algorithms and methods. The objective of this work is to provide a complete dataset of three common training surgical tasks that surgeons perform to improve their skills. For this purpose, 12 subjects teleoperated the da Vinci Research Kit to perform these tasks. The obtained dataset includes all the kinematics and dynamics information provided by the da Vinci robot (both master and slave side) together with the associated video from the camera. All the information has been carefully timestamped and provided in a readable csv format. A MATLAB interface integrated with ROS for using and replicating the data is also provided.
A GNC Architecture for Planetary Rovers with Autonomous Navigation Capabilities
Nov 22, 2019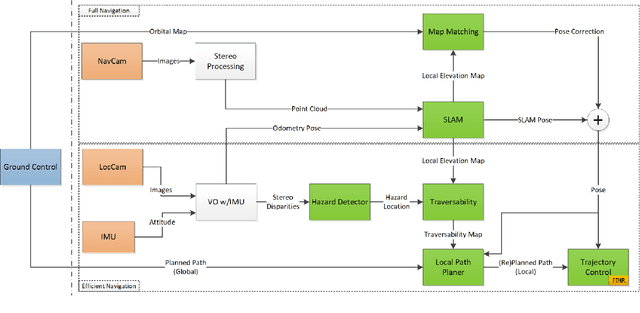
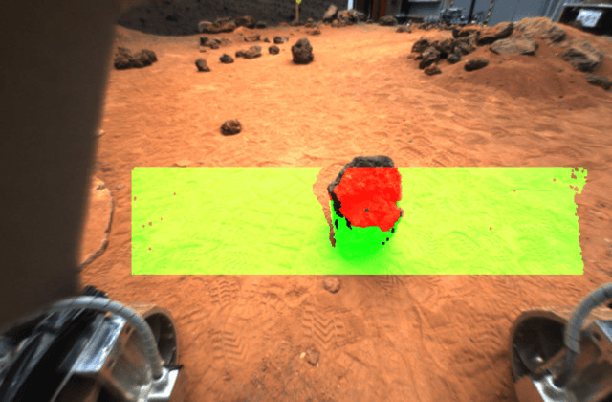
This paper proposes a Guidance, Navigation, and Control (GNC) architecture for planetary rovers targeting the conditions of upcoming Mars exploration missions such as Mars 2020 and the Sample Fetching Rover (SFR). The navigation requirements of these missions demand a control architecture featuring autonomous capabilities to achieve a fast and long traverse. The proposed solution presents a two-level architecture where the efficient navigation (low) level is always active and the full navigation (upper) level is enabled according to the difficulty of the terrain. The first level is an efficient implementation of the basic functionalities for autonomous navigation based on hazard detection, local path replanning, and trajectory control with visual odometry. The second level implements an adaptive SLAM algorithm that improves the relative localization, evaluates the traversability of the terrain ahead for a more optimal path planning, and performs global (absolute) localization that corrects the pose drift during longer traverses. The architecture provides a solution for long range, low supervision and fast planetary exploration. Both navigation levels have been validated on planetary analogue field test campaigns.