 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA GNC Architecture for Planetary Rovers with Autonomous Navigation Capabilities
Paper and Code
Nov 22, 2019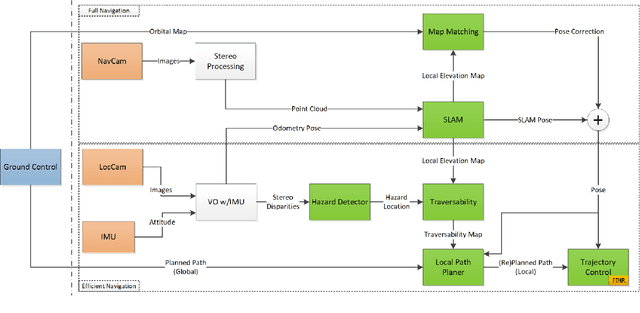
This paper proposes a Guidance, Navigation, and Control (GNC) architecture for planetary rovers targeting the conditions of upcoming Mars exploration missions such as Mars 2020 and the Sample Fetching Rover (SFR). The navigation requirements of these missions demand a control architecture featuring autonomous capabilities to achieve a fast and long traverse. The proposed solution presents a two-level architecture where the efficient navigation (low) level is always active and the full navigation (upper) level is enabled according to the difficulty of the terrain. The first level is an efficient implementation of the basic functionalities for autonomous navigation based on hazard detection, local path replanning, and trajectory control with visual odometry. The second level implements an adaptive SLAM algorithm that improves the relative localization, evaluates the traversability of the terrain ahead for a more optimal path planning, and performs global (absolute) localization that corrects the pose drift during longer traverses. The architecture provides a solution for long range, low supervision and fast planetary exploration. Both navigation levels have been validated on planetary analogue field test campaigns.