 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermal Vision for Soil Assessment in a Multipurpose Environmental Chamber under Martian Conditions towards Robot Navigation
Apr 26, 2023



Soil assessment is important for mobile robot planning and navigation on natural and planetary environments. Terramechanic characteristics can be inferred from the thermal behaviour of soils under the influence of sunlight using remote sensors such as Long-Wave Infrared cameras. However, this behaviour is greatly affected by the low atmospheric pressures of planets such as Mars, so practical models are needed to relate robot remote sensing data on Earth to target planetary exploration conditions. This article proposes a general framework based on multipurpose environmental chambers to generate representative diurnal cycle dataset pairs that can be useful to relate the thermal behaviour of a soil on Earth to the corresponding behaviour under planetary pressure conditions using remote sensing. Furthermore, we present an application of the proposed framework to generate datasets using the UMA-Laserlab chamber, which can replicate the atmospheric \ch{CO2} composition of Mars. In particular, we analyze the thermal behaviour of four soil samples of different granularity by comparing replicated Martian surface conditions and their Earth's diurnal cycle equivalent. Results indicate a correlation between granularity and thermal inertia that is consistent with available Mars surface measurements recorded by rovers. The resulting dataset pairs, consisting of representative diurnal cycle thermal images with heater, air, and subsurface temperatures, have been made available for the scientific community.
Hardware-accelerated Mars Sample Localization via deep transfer learning from photorealistic simulations
Jun 06, 2022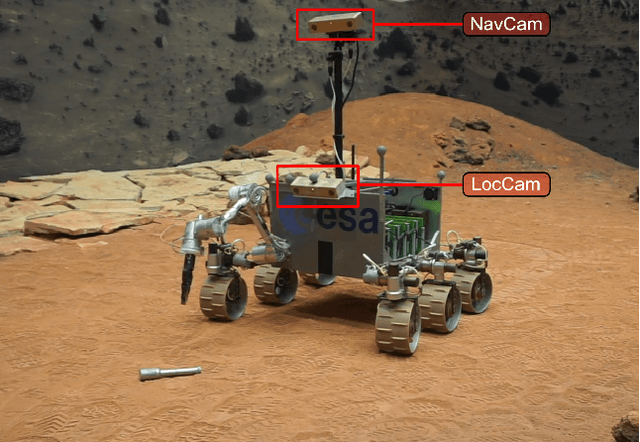


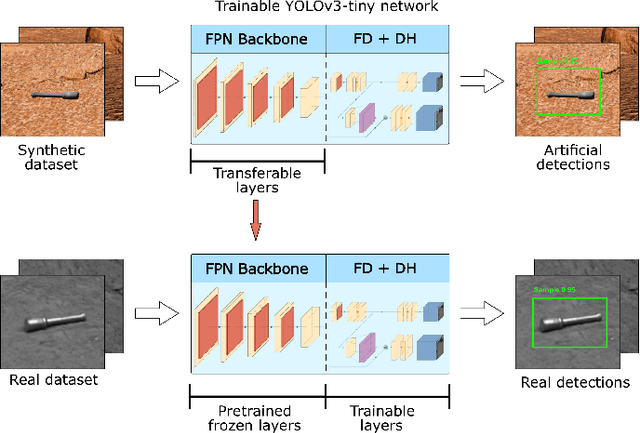
The goal of the Mars Sample Return campaign is to collect soil samples from the surface of Mars and return them to Earth for further study. The samples will be acquired and stored in metal tubes by the Perseverance rover and deposited on the Martian surface. As part of this campaign, it is expected the Sample Fetch Rover will be in charge of localizing and gathering up to 35 sample tubes over 150 Martian sols. Autonomous capabilities are critical for the success of the overall campaign and for the Sample Fetch Rover in particular. This work proposes a novel approach for the autonomous detection and pose estimation of the sample tubes. For the detection stage, a Deep Neural Network and transfer learning from a synthetic dataset are proposed. The dataset is created from photorealistic 3D simulations of Martian scenarios. Additionally, Computer Vision techniques are used to estimate the detected sample tubes poses. Finally, laboratory tests of the Sample Localization procedure are performed using the ExoMars Testing Rover on a Mars-like testbed. These tests validate the proposed approach in different hardware architectures, providing promising results related to the sample detection and pose estimation.