 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Contact Grasping of Soft Tissue with Complex Geometry using a Vortex Gripper
Jan 14, 2025Soft tissue manipulation is an integral aspect of most surgical procedures; however, the vast majority of surgical graspers used today are made of hard materials, such as metals or hard plastics. Furthermore, these graspers predominately function by pinching tissue between two hard objects as a method for tissue manipulation. As such, the potential to apply too much force during contact, and thus damage tissue, is inherently high. As an alternative approach, gaspers developed using a pneumatic vortex could potentially levitate soft tissue, enabling manipulation with low or even no contact force. In this paper, we present the design and well as a full factorial study of the force characteristics of the vortex gripper grasping soft surfaces with four common shapes, with convex and concave curvature, and ranging over 10 different radii of curvature, for a total of 40 unique surfaces. By changing the parameters of the nozzle elements in the design of the gripper, it was possible to investigate the influence of the mass flow parameters of the vortex gripper on the lifting force for all of these different soft surfaces. An $\pmb{ex}$ $\pmb{vivo}$ experiment was conducted on grasping biological tissues and soft balls of various shapes to show the advantages and disadvantages of the proposed technology. The obtained results allowed us to find limitations in the use of vortex technology and the following stages of its improvement for medical use.
Dexterous Manipulation of Deformable Objects via Pneumatic Gripping: Lifting by One End
Jan 09, 2025Manipulating deformable objects in robotic cells is often costly and not widely accessible. However, the use of localized pneumatic gripping systems can enhance accessibility. Current methods that use pneumatic grippers to handle deformable objects struggle with effective lifting. This paper introduces a method for the dexterous lifting of textile deformable objects from one edge, utilizing a previously developed gripper designed for flexible and porous materials. By precisely adjusting the orientation and position of the gripper during the lifting process, we were able to significantly reduce necessary gripping force and minimize object vibration caused by airflow. This method was tested and validated on four materials with varying mass, friction, and flexibility. The proposed approach facilitates the lifting of deformable objects from a conveyor or automated line, even when only one edge is accessible for grasping. Future work will involve integrating a vision system to optimize the manipulation of deformable objects with more complex shapes.
Uncertainty-aware Self-supervised Learning for Cross-domain Technical Skill Assessment in Robot-assisted Surgery
Apr 28, 2023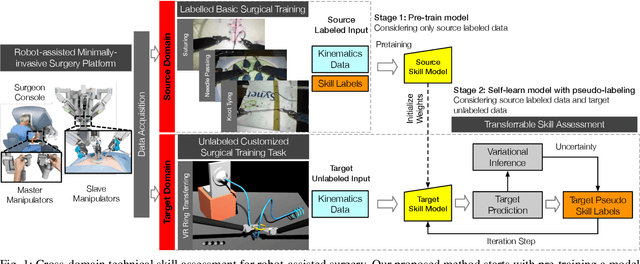
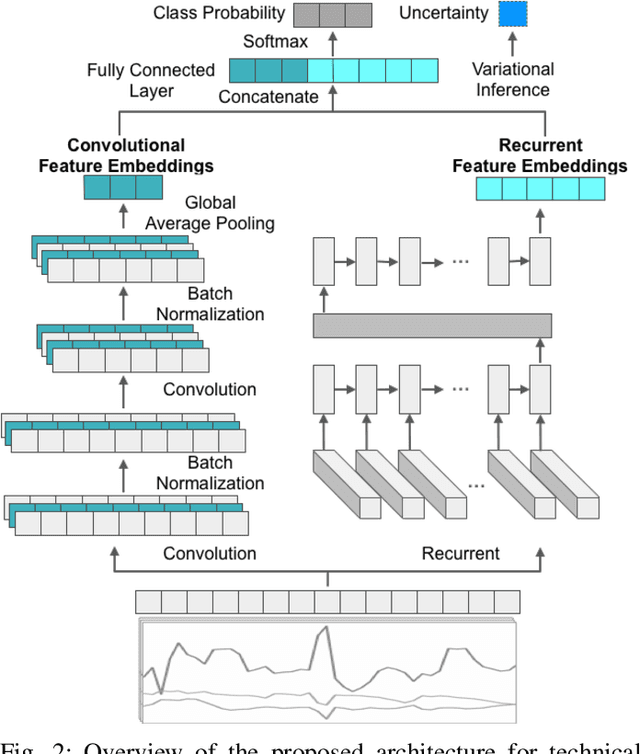
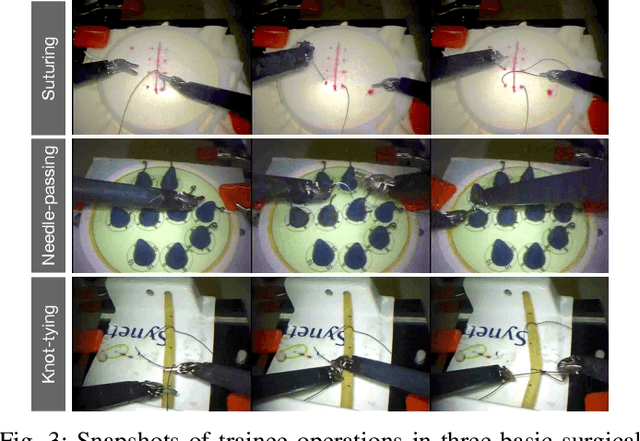
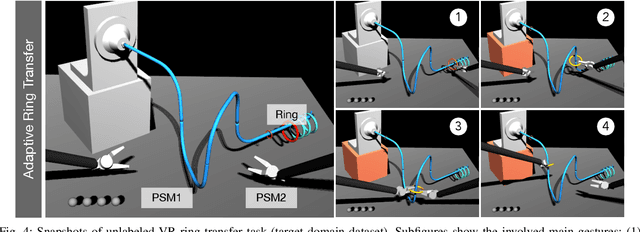
Objective technical skill assessment is crucial for effective training of new surgeons in robot-assisted surgery. With advancements in surgical training programs in both physical and virtual environments, it is imperative to develop generalizable methods for automatically assessing skills. In this paper, we propose a novel approach for skill assessment by transferring domain knowledge from labeled kinematic data to unlabeled data. Our approach leverages labeled data from common surgical training tasks such as Suturing, Needle Passing, and Knot Tying to jointly train a model with both labeled and unlabeled data. Pseudo labels are generated for the unlabeled data through an iterative manner that incorporates uncertainty estimation to ensure accurate labeling. We evaluate our method on a virtual reality simulated training task (Ring Transfer) using data from the da Vinci Research Kit (dVRK). The results show that trainees with robotic assistance have significantly higher expert probability compared to these without any assistance, p < 0.05, which aligns with previous studies showing the benefits of robotic assistance in improving training proficiency. Our method offers a significant advantage over other existing works as it does not require manual labeling or prior knowledge of the surgical training task for robot-assisted surgery.
Recognition and Prediction of Surgical Gestures and Trajectories Using Transformer Models in Robot-Assisted Surgery
Dec 03, 2022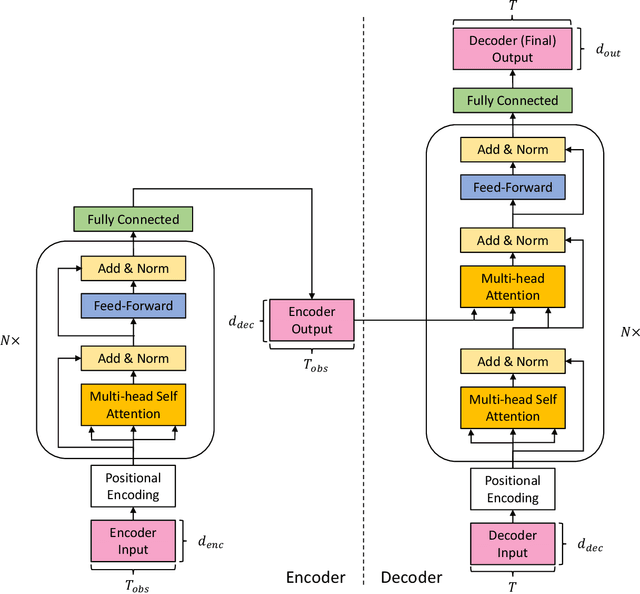

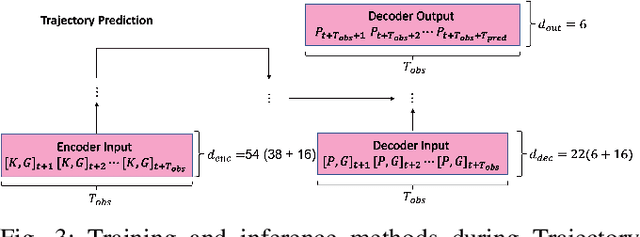
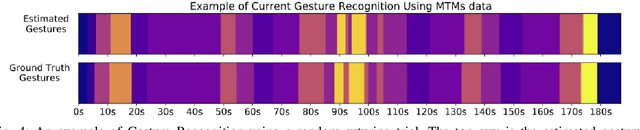
Surgical activity recognition and prediction can help provide important context in many Robot-Assisted Surgery (RAS) applications, for example, surgical progress monitoring and estimation, surgical skill evaluation, and shared control strategies during teleoperation. Transformer models were first developed for Natural Language Processing (NLP) to model word sequences and soon the method gained popularity for general sequence modeling tasks. In this paper, we propose the novel use of a Transformer model for three tasks: gesture recognition, gesture prediction, and trajectory prediction during RAS. We modify the original Transformer architecture to be able to generate the current gesture sequence, future gesture sequence, and future trajectory sequence estimations using only the current kinematic data of the surgical robot end-effectors. We evaluate our proposed models on the JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS) and use Leave-One-User-Out (LOUO) cross-validation to ensure the generalizability of our results. Our models achieve up to 89.3\% gesture recognition accuracy, 84.6\% gesture prediction accuracy (1 second ahead) and 2.71mm trajectory prediction error (1 second ahead). Our models are comparable to and able to outperform state-of-the-art methods while using only the kinematic data channel. This approach can enable near-real time surgical activity recognition and prediction.
Adaptive Surgical Robotic Training Using Real-Time Stylistic Behavior Feedback Through Haptic Cues
Dec 31, 2020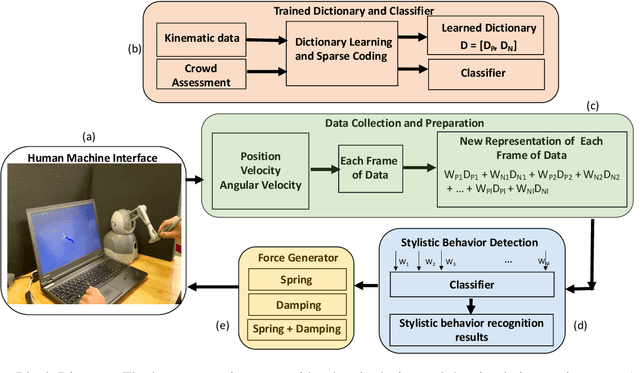
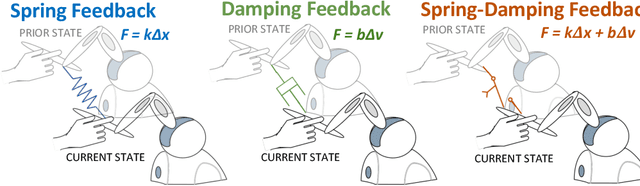

Surgical skill directly affects surgical procedure outcomes; thus, effective training is needed to ensure satisfactory results. Many objective assessment metrics have been developed and some are widely used in surgical training simulators. These objective metrics provide the trainee with descriptive feedback about their performance however, often lack feedback on how to proceed to improve performance. The most effective training method is one that is intuitive, easy to understand, personalized to the user and provided in a timely manner. We propose a framework to enable user-adaptive training using near-real-time detection of performance, based on intuitive styles of surgical movements (e.g., fluidity, smoothness, crispness, etc.), and propose a haptic feedback framework to assist with correcting styles of movement. We evaluate the ability of three types of force feedback (spring, damping, and spring plus damping feedback), computed based on prior user positions, to improve different stylistic behaviors of the user during kinematically constrained reaching movement tasks. The results indicate that four out of the six styles studied here were statistically significantly improved (p<0.05) using spring guidance force feedback and a significant reduction in task time was also found using spring feedback. The path straightness and targeting error in the task were other task performance metrics studied which were improved significantly using the spring-damping feedback. This study presents a groundwork for adaptive training in robotic surgery based on near-real-time human-centric models of surgical behavior.
Transferrable Operative Difficulty Assessment in Robot-assisted Teleoperation: A Domain Adaptation Approach
Jun 12, 2019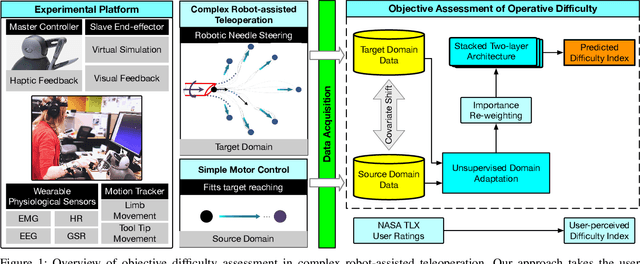
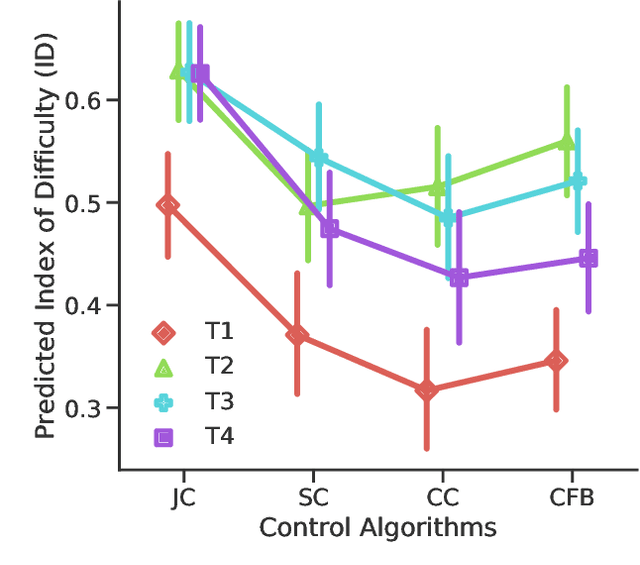
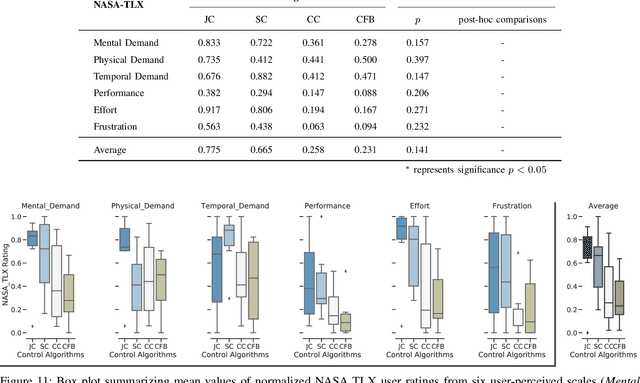
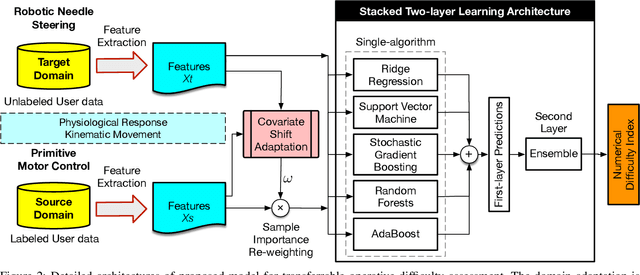
Providing an accurate and efficient assessment of operative difficulty is important for designing robot-assisted teleoperation interfaces that are easy and natural for human operators to use. In this paper, we aim to develop a data-driven approach to numerically characterize the operative difficulty demand of complex teleoperation. In effort to provide an entirely task-independent assessment, we consider using only data collected from the human user including: (1) physiological response, and (2) movement kinematics. By leveraging an unsupervised domain adaptation technique, our approach learns the user information that defines task difficulty in a well-known source, namely, a Fitt's target reaching task, and generalizes that knowledge to a more complex human motor control scenario, namely, the teleoperation of a robotic system. Our approach consists of two main parts: (1) The first part accounts for the inherent variances of user physiological and kinematic response between these cross-domain motor control scenarios that are vastly different. (2) A stacked two-layer learner is designed to improve the overall modeling performance, yielding a 96.6% accuracy in predicting the known difficulty of a Fitts' reaching task when using movement kinematic features. We then validate the effectiveness of our model by investigating teleoperated robotic needle steering as a case study. Compared with a standard NASA TLX user survey, our results indicate significant differences in the difficulty demand for various choices of needle steering control algorithms, p<0.05, as well as the difficulty of steering the needle to different targets, p<0.05. The results highlight the potential of our approach to be used as a design tool to create more intuitive and natural teleoperation interfaces in robot-assisted systems.
Deep Learning with Convolutional Neural Network for Objective Skill Evaluation in Robot-assisted Surgery
Mar 07, 2019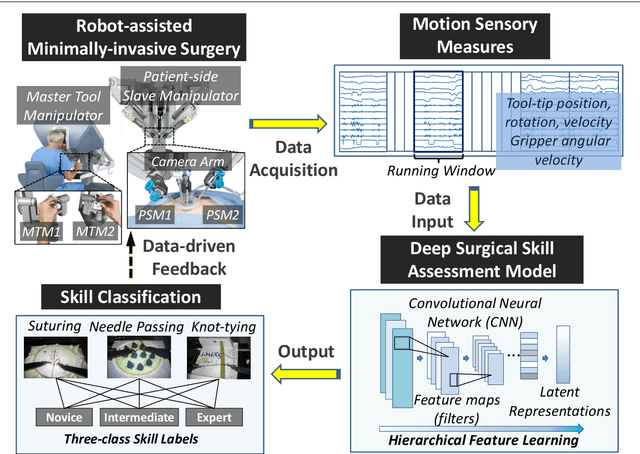

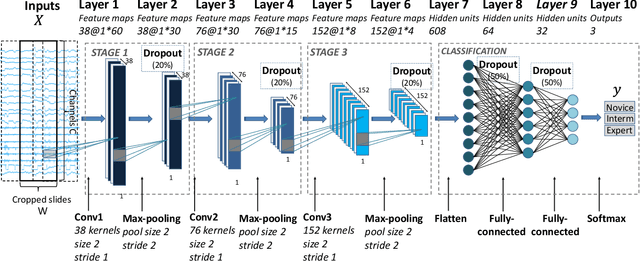

With the advent of robot-assisted surgery, the role of data-driven approaches to integrate statistics and machine learning is growing rapidly with prominent interests in objective surgical skill assessment. However, most existing work requires translating robot motion kinematics into intermediate features or gesture segments that are expensive to extract, lack efficiency, and require significant domain-specific knowledge. We propose an analytical deep learning framework for skill assessment in surgical training. A deep convolutional neural network is implemented to map multivariate time series data of the motion kinematics to individual skill levels. We perform experiments on the public minimally invasive surgical robotic dataset, JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS). Our proposed learning model achieved a competitive accuracy of 92.5%, 95.4%, and 91.3%, in the standard training tasks: Suturing, Needle-passing, and Knot-tying, respectively. Without the need of engineered features or carefully-tuned gesture segmentation, our model can successfully decode skill information from raw motion profiles via end-to-end learning. Meanwhile, the proposed model is able to reliably interpret skills within 1-3 second window, without needing an observation of entire training trial. This study highlights the potentials of deep architectures for an proficient online skill assessment in modern surgical training.
* Manuscript published. For reference, see https://link.springer.com/article/10.1007/s11548-018-1860-1
SATR-DL: Improving Surgical Skill Assessment and Task Recognition in Robot-assisted Surgery with Deep Neural Networks
Jun 15, 2018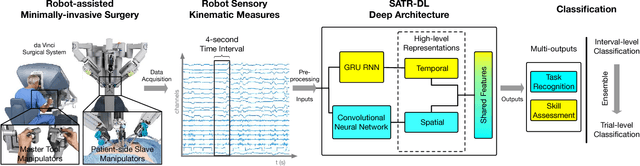
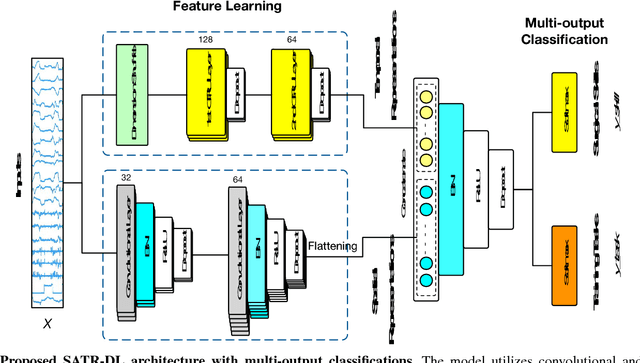
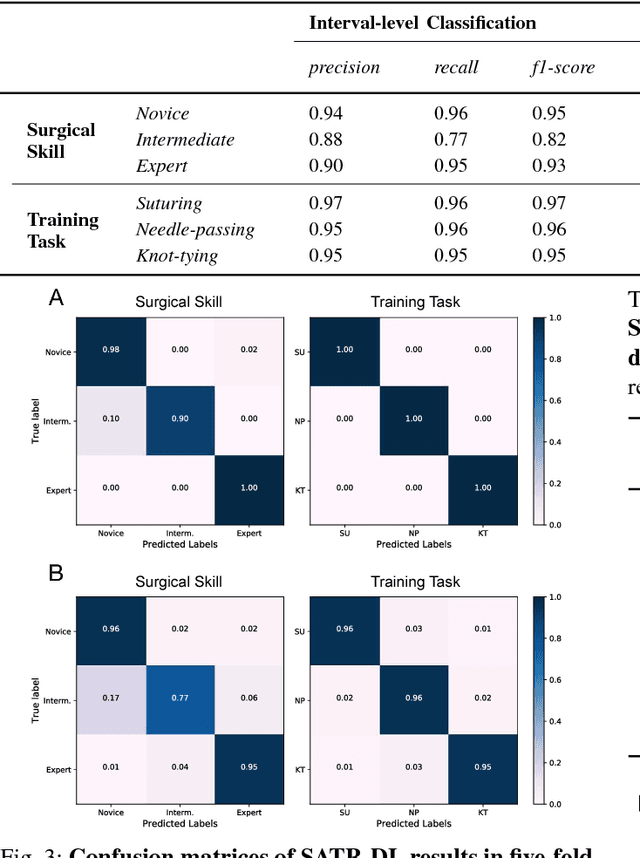
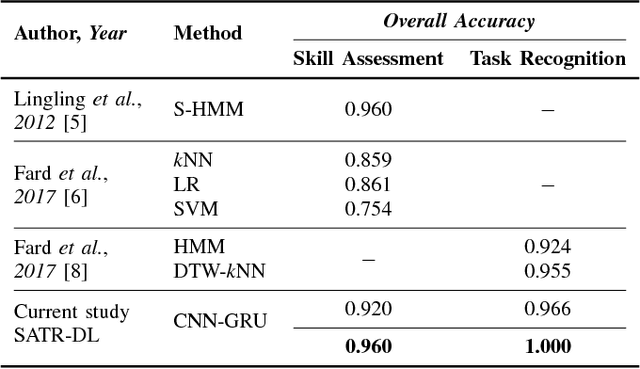
Purpose: This paper focuses on an automated analysis of surgical motion profiles for objective skill assessment and task recognition in robot-assisted surgery. Existing techniques heavily rely on conventional statistic measures or shallow modelings based on hand-engineered features and gesture segmentation. Such developments require significant expert knowledge, are prone to errors, and are less efficient in online adaptive training systems. Methods: In this work, we present an efficient analytic framework with a parallel deep learning architecture, SATR-DL, to assess trainee expertise and recognize surgical training activity. Through an end-to-end learning technique, abstract information of spatial representations and temporal dynamics is jointly obtained directly from raw motion sequences. Results: By leveraging a shared high-level representation learning, the resulting model is successful in the recognition of trainee skills and surgical tasks, suturing, needle-passing, and knot-tying. Meanwhile, we explore the use of ensemble in classification at the trial level, where the SATR-DL outperforms state-of-the-art performance by achieving accuracies of 0.960 and 1.000 in skill assessment and task recognition, respectively. Conclusion: This study highlights the potential of SATR-DL to provide improvements for an efficient data-driven assessment in intelligent robotic surgery.