 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferrable Operative Difficulty Assessment in Robot-assisted Teleoperation: A Domain Adaptation Approach
Paper and Code
Jun 12, 2019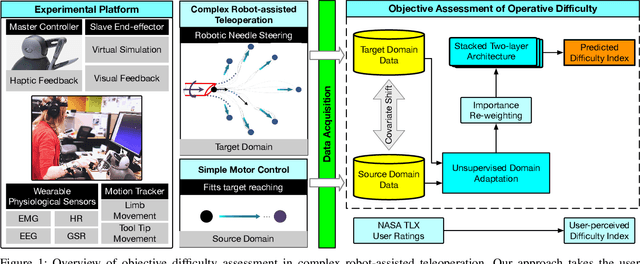
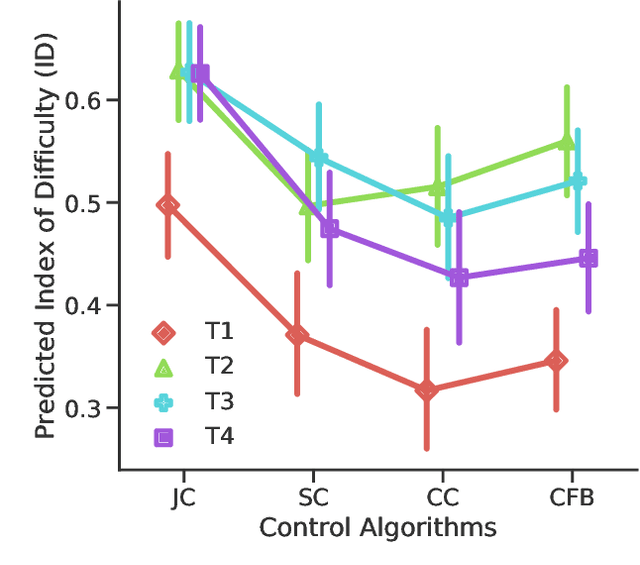
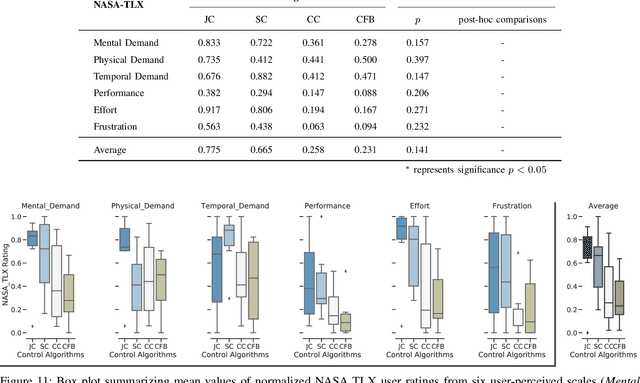
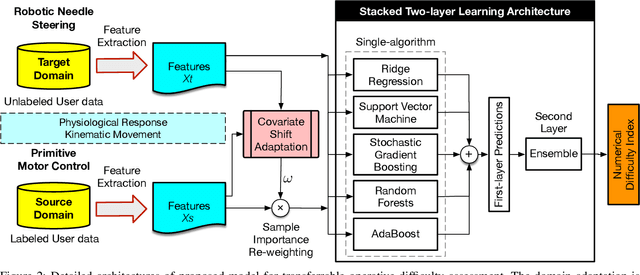
Providing an accurate and efficient assessment of operative difficulty is important for designing robot-assisted teleoperation interfaces that are easy and natural for human operators to use. In this paper, we aim to develop a data-driven approach to numerically characterize the operative difficulty demand of complex teleoperation. In effort to provide an entirely task-independent assessment, we consider using only data collected from the human user including: (1) physiological response, and (2) movement kinematics. By leveraging an unsupervised domain adaptation technique, our approach learns the user information that defines task difficulty in a well-known source, namely, a Fitt's target reaching task, and generalizes that knowledge to a more complex human motor control scenario, namely, the teleoperation of a robotic system. Our approach consists of two main parts: (1) The first part accounts for the inherent variances of user physiological and kinematic response between these cross-domain motor control scenarios that are vastly different. (2) A stacked two-layer learner is designed to improve the overall modeling performance, yielding a 96.6% accuracy in predicting the known difficulty of a Fitts' reaching task when using movement kinematic features. We then validate the effectiveness of our model by investigating teleoperated robotic needle steering as a case study. Compared with a standard NASA TLX user survey, our results indicate significant differences in the difficulty demand for various choices of needle steering control algorithms, p<0.05, as well as the difficulty of steering the needle to different targets, p<0.05. The results highlight the potential of our approach to be used as a design tool to create more intuitive and natural teleoperation interfaces in robot-assisted systems.