 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning with Convolutional Neural Network for Objective Skill Evaluation in Robot-assisted Surgery
Paper and Code
Mar 07, 2019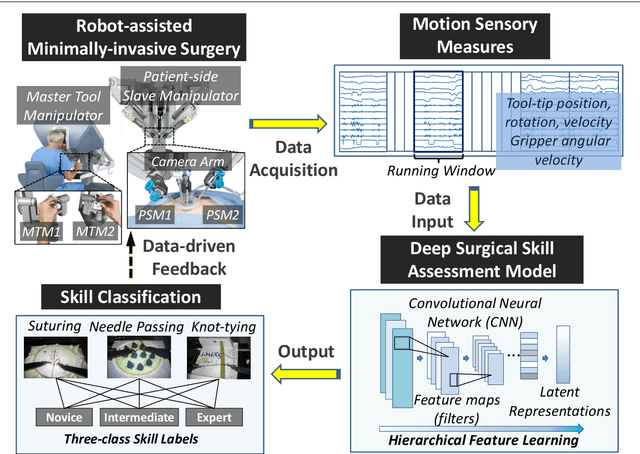

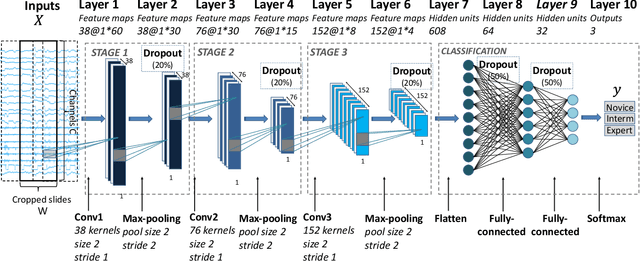

With the advent of robot-assisted surgery, the role of data-driven approaches to integrate statistics and machine learning is growing rapidly with prominent interests in objective surgical skill assessment. However, most existing work requires translating robot motion kinematics into intermediate features or gesture segments that are expensive to extract, lack efficiency, and require significant domain-specific knowledge. We propose an analytical deep learning framework for skill assessment in surgical training. A deep convolutional neural network is implemented to map multivariate time series data of the motion kinematics to individual skill levels. We perform experiments on the public minimally invasive surgical robotic dataset, JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS). Our proposed learning model achieved a competitive accuracy of 92.5%, 95.4%, and 91.3%, in the standard training tasks: Suturing, Needle-passing, and Knot-tying, respectively. Without the need of engineered features or carefully-tuned gesture segmentation, our model can successfully decode skill information from raw motion profiles via end-to-end learning. Meanwhile, the proposed model is able to reliably interpret skills within 1-3 second window, without needing an observation of entire training trial. This study highlights the potentials of deep architectures for an proficient online skill assessment in modern surgical training.