 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecognition and Prediction of Surgical Gestures and Trajectories Using Transformer Models in Robot-Assisted Surgery
Paper and Code
Dec 03, 2022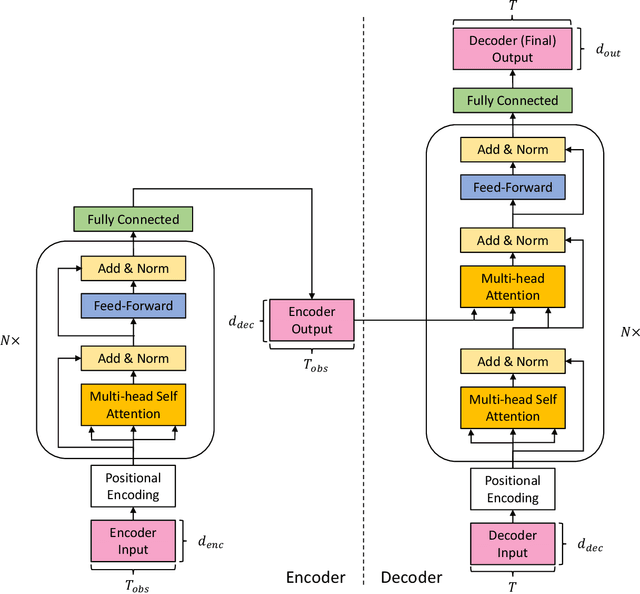

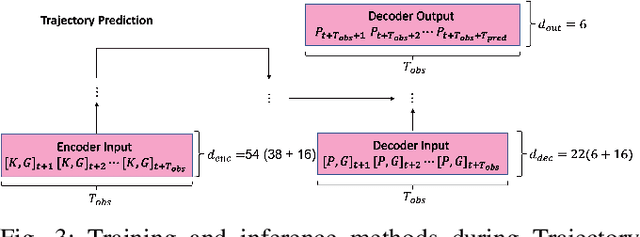
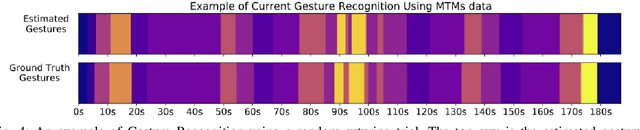
Surgical activity recognition and prediction can help provide important context in many Robot-Assisted Surgery (RAS) applications, for example, surgical progress monitoring and estimation, surgical skill evaluation, and shared control strategies during teleoperation. Transformer models were first developed for Natural Language Processing (NLP) to model word sequences and soon the method gained popularity for general sequence modeling tasks. In this paper, we propose the novel use of a Transformer model for three tasks: gesture recognition, gesture prediction, and trajectory prediction during RAS. We modify the original Transformer architecture to be able to generate the current gesture sequence, future gesture sequence, and future trajectory sequence estimations using only the current kinematic data of the surgical robot end-effectors. We evaluate our proposed models on the JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS) and use Leave-One-User-Out (LOUO) cross-validation to ensure the generalizability of our results. Our models achieve up to 89.3\% gesture recognition accuracy, 84.6\% gesture prediction accuracy (1 second ahead) and 2.71mm trajectory prediction error (1 second ahead). Our models are comparable to and able to outperform state-of-the-art methods while using only the kinematic data channel. This approach can enable near-real time surgical activity recognition and prediction.