 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFactored Latent Action World Models
Feb 18, 2026Learning latent actions from action-free video has emerged as a powerful paradigm for scaling up controllable world model learning. Latent actions provide a natural interface for users to iteratively generate and manipulate videos. However, most existing approaches rely on monolithic inverse and forward dynamics models that learn a single latent action to control the entire scene, and therefore struggle in complex environments where multiple entities act simultaneously. This paper introduces Factored Latent Action Model (FLAM), a factored dynamics framework that decomposes the scene into independent factors, each inferring its own latent action and predicting its own next-step factor value. This factorized structure enables more accurate modeling of complex multi-entity dynamics and improves video generation quality in action-free video settings compared to monolithic models. Based on experiments on both simulation and real-world multi-entity datasets, we find that FLAM outperforms prior work in prediction accuracy and representation quality, and facilitates downstream policy learning, demonstrating the benefits of factorized latent action models.
A Dual-Feature Extractor Framework for Accurate Back Depth and Spine Morphology Estimation from Monocular RGB Images
Jul 30, 2025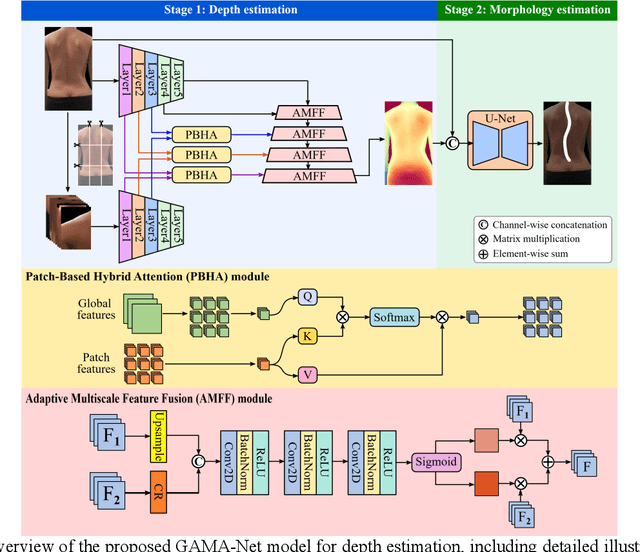
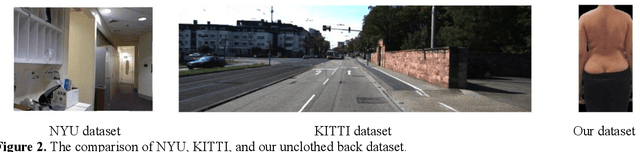
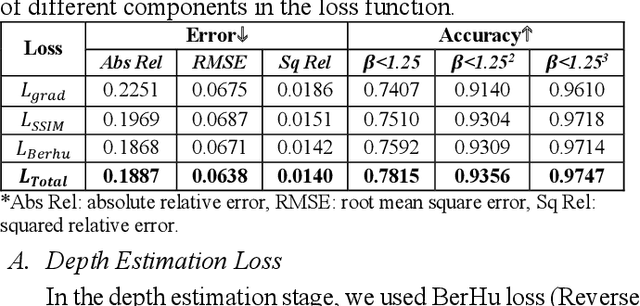
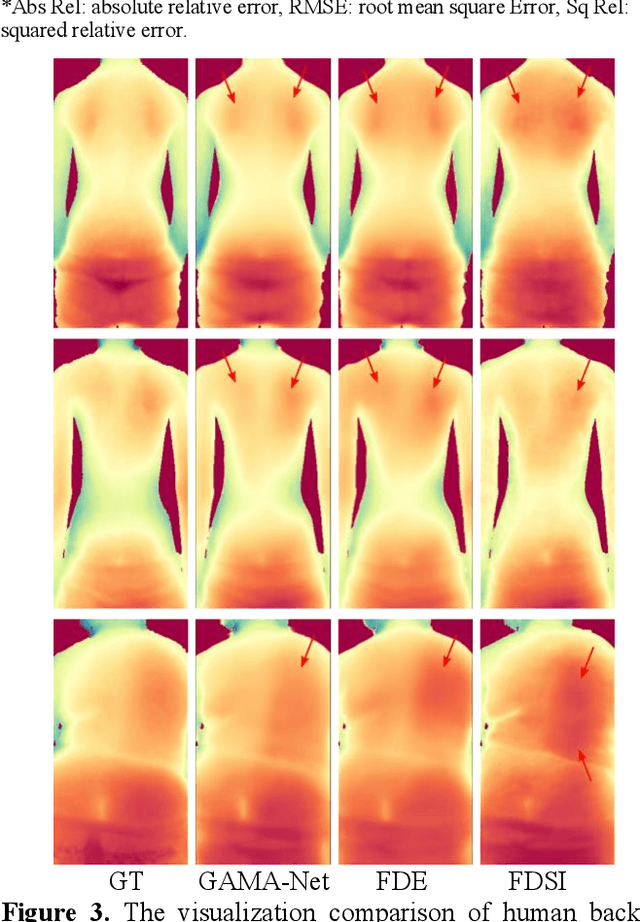
Scoliosis is a prevalent condition that impacts both physical health and appearance, with adolescent idiopathic scoliosis (AIS) being the most common form. Currently, the main AIS assessment tool, X-rays, poses significant limitations, including radiation exposure and limited accessibility in poor and remote areas. To address this problem, the current solutions are using RGB images to analyze spine morphology. However, RGB images are highly susceptible to environmental factors, such as lighting conditions, compromising model stability and generalizability. Therefore, in this study, we propose a novel pipeline to accurately estimate the depth information of the unclothed back, compensating for the limitations of 2D information, and then estimate spine morphology by integrating both depth and surface information. To capture the subtle depth variations of the back surface with precision, we design an adaptive multiscale feature learning network named Grid-Aware Multiscale Adaptive Network (GAMA-Net). This model uses dual encoders to extract both patch-level and global features, which are then interacted by the Patch-Based Hybrid Attention (PBHA) module. The Adaptive Multiscale Feature Fusion (AMFF) module is used to dynamically fuse information in the decoder. As a result, our depth estimation model achieves remarkable accuracy across three different evaluation metrics, with scores of nearly 78.2%, 93.6%, and 97.5%, respectively. To further validate the effectiveness of the predicted depth, we integrate both surface and depth information for spine morphology estimation. This integrated approach enhances the accuracy of spine curve generation, achieving an impressive performance of up to 97%.
Null Counterfactual Factor Interactions for Goal-Conditioned Reinforcement Learning
May 06, 2025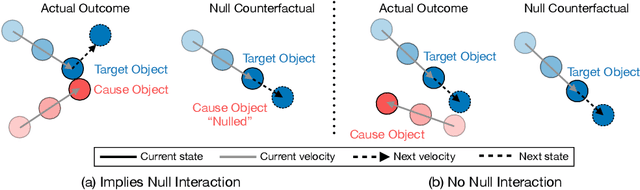
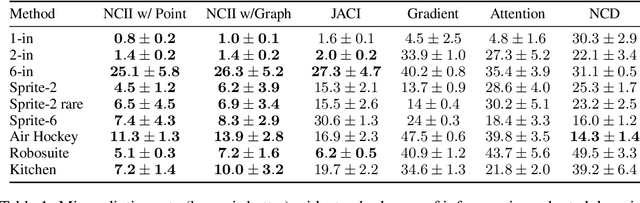
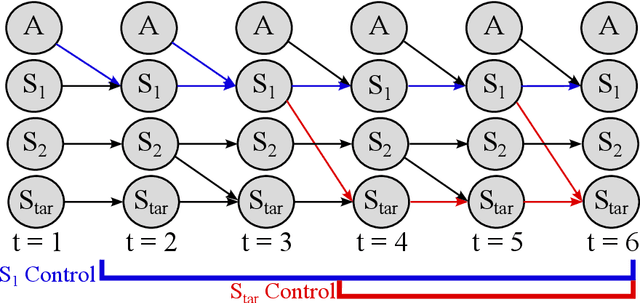

Hindsight relabeling is a powerful tool for overcoming sparsity in goal-conditioned reinforcement learning (GCRL), especially in certain domains such as navigation and locomotion. However, hindsight relabeling can struggle in object-centric domains. For example, suppose that the goal space consists of a robotic arm pushing a particular target block to a goal location. In this case, hindsight relabeling will give high rewards to any trajectory that does not interact with the block. However, these behaviors are only useful when the object is already at the goal -- an extremely rare case in practice. A dataset dominated by these kinds of trajectories can complicate learning and lead to failures. In object-centric domains, one key intuition is that meaningful trajectories are often characterized by object-object interactions such as pushing the block with the gripper. To leverage this intuition, we introduce Hindsight Relabeling using Interactions (HInt), which combines interactions with hindsight relabeling to improve the sample efficiency of downstream RL. However because interactions do not have a consensus statistical definition tractable for downstream GCRL, we propose a definition of interactions based on the concept of null counterfactual: a cause object is interacting with a target object if, in a world where the cause object did not exist, the target object would have different transition dynamics. We leverage this definition to infer interactions in Null Counterfactual Interaction Inference (NCII), which uses a "nulling'' operation with a learned model to infer interactions. NCII is able to achieve significantly improved interaction inference accuracy in both simple linear dynamics domains and dynamic robotic domains in Robosuite, Robot Air Hockey, and Franka Kitchen and HInt improves sample efficiency by up to 4x.
* Published at ICLR 2025
Robot Air Hockey: A Manipulation Testbed for Robot Learning with Reinforcement Learning
May 06, 2024



Reinforcement Learning is a promising tool for learning complex policies even in fast-moving and object-interactive domains where human teleoperation or hard-coded policies might fail. To effectively reflect this challenging category of tasks, we introduce a dynamic, interactive RL testbed based on robot air hockey. By augmenting air hockey with a large family of tasks ranging from easy tasks like reaching, to challenging ones like pushing a block by hitting it with a puck, as well as goal-based and human-interactive tasks, our testbed allows a varied assessment of RL capabilities. The robot air hockey testbed also supports sim-to-real transfer with three domains: two simulators of increasing fidelity and a real robot system. Using a dataset of demonstration data gathered through two teleoperation systems: a virtualized control environment, and human shadowing, we assess the testbed with behavior cloning, offline RL, and RL from scratch.
Recognition and Prediction of Surgical Gestures and Trajectories Using Transformer Models in Robot-Assisted Surgery
Dec 03, 2022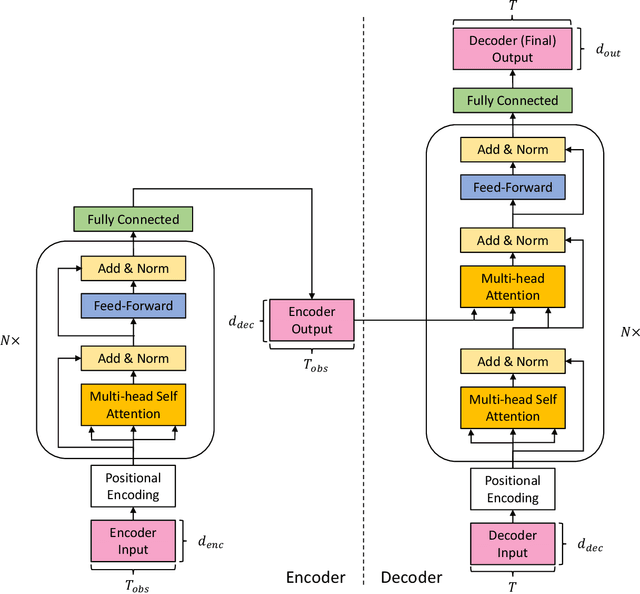

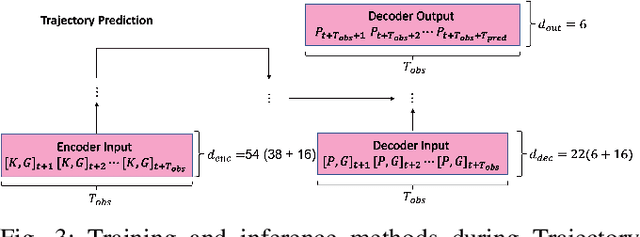
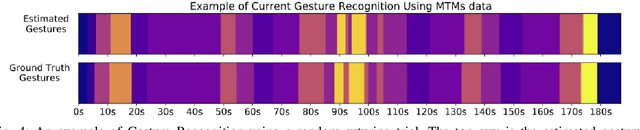
Surgical activity recognition and prediction can help provide important context in many Robot-Assisted Surgery (RAS) applications, for example, surgical progress monitoring and estimation, surgical skill evaluation, and shared control strategies during teleoperation. Transformer models were first developed for Natural Language Processing (NLP) to model word sequences and soon the method gained popularity for general sequence modeling tasks. In this paper, we propose the novel use of a Transformer model for three tasks: gesture recognition, gesture prediction, and trajectory prediction during RAS. We modify the original Transformer architecture to be able to generate the current gesture sequence, future gesture sequence, and future trajectory sequence estimations using only the current kinematic data of the surgical robot end-effectors. We evaluate our proposed models on the JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS) and use Leave-One-User-Out (LOUO) cross-validation to ensure the generalizability of our results. Our models achieve up to 89.3\% gesture recognition accuracy, 84.6\% gesture prediction accuracy (1 second ahead) and 2.71mm trajectory prediction error (1 second ahead). Our models are comparable to and able to outperform state-of-the-art methods while using only the kinematic data channel. This approach can enable near-real time surgical activity recognition and prediction.