 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Source Multi-Viewpoint Surgical Telerobotics
May 16, 2025As robots for minimally invasive surgery (MIS) gradually become more accessible and modular, we believe there is a great opportunity to rethink and expand the visualization and control paradigms that have characterized surgical teleoperation since its inception. We conjecture that introducing one or more additional adjustable viewpoints in the abdominal cavity would not only unlock novel visualization and collaboration strategies for surgeons but also substantially boost the robustness of machine perception toward shared autonomy. Immediate advantages include controlling a second viewpoint and teleoperating surgical tools from a different perspective, which would allow collaborating surgeons to adjust their views independently and still maneuver their robotic instruments intuitively. Furthermore, we believe that capturing synchronized multi-view 3D measurements of the patient's anatomy would unlock advanced scene representations. Accurate real-time intraoperative 3D perception will allow algorithmic assistants to directly control one or more robotic instruments and/or robotic cameras. Toward these goals, we are building a synchronized multi-viewpoint, multi-sensor robotic surgery system by integrating high-performance vision components and upgrading the da Vinci Research Kit control logic. This short paper reports a functional summary of our setup and elaborates on its potential impacts in research and future clinical practice. By fully open-sourcing our system, we will enable the research community to reproduce our setup, improve it, and develop powerful algorithms, effectively boosting clinical translation of cutting-edge research.
Video-Based Detection and Analysis of Errors in Robotic Surgical Training
Apr 28, 2025Robot-assisted minimally invasive surgeries offer many advantages but require complex motor tasks that take surgeons years to master. There is currently a lack of knowledge on how surgeons acquire these robotic surgical skills. To help bridge this gap, we previously followed surgical residents learning complex surgical training dry-lab tasks on a surgical robot over six months. Errors are an important measure for self-training and for skill evaluation, but unlike in virtual simulations, in dry-lab training, errors are difficult to monitor automatically. Here, we analyzed the errors in the ring tower transfer task, in which surgical residents moved a ring along a curved wire as quickly and accurately as possible. We developed an image-processing algorithm to detect collision errors and achieved detection accuracy of ~95%. Using the detected errors and task completion time, we found that the surgical residents decreased their completion time and number of errors over the six months. This analysis provides a framework for detecting collision errors in similar surgical training tasks and sheds light on the learning process of the surgical residents.
Dataset and Analysis of Long-Term Skill Acquisition in Robot-Assisted Minimally Invasive Surgery
Mar 27, 2025Objective: We aim to investigate long-term robotic surgical skill acquisition among surgical residents and the effects of training intervals and fatigue on performance. Methods: For six months, surgical residents participated in three training sessions once a month, surrounding a single 26-hour hospital shift. In each shift, they participated in training sessions scheduled before, during, and after the shift. In each training session, they performed three dry-lab training tasks: Ring Tower Transfer, Knot-Tying, and Suturing. We collected a comprehensive dataset, including videos synchronized with kinematic data, activity tracking, and scans of the suturing pads. Results: We collected a dataset of 972 trials performed by 18 residents of different surgical specializations. Participants demonstrated consistent performance improvement across all tasks. In addition, we found variations in between-shift learning and forgetting across metrics and tasks, and hints for possible effects of fatigue. Conclusion: The findings from our first analysis shed light on the long-term learning processes of robotic surgical skills with extended intervals and varying levels of fatigue. Significance: This study lays the groundwork for future research aimed at optimizing training protocols and enhancing AI applications in surgery, ultimately contributing to improved patient outcomes. The dataset will be made available upon acceptance of our journal submission.
Combining Time-Dependent Force Perturbations in Robot-Assisted Surgery Training
May 09, 2021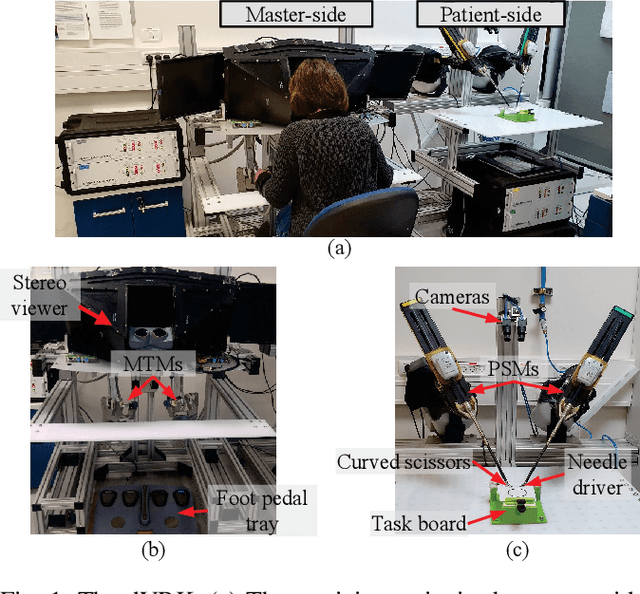
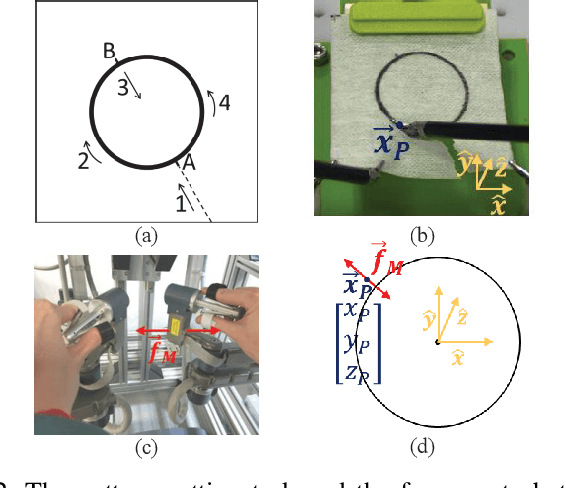
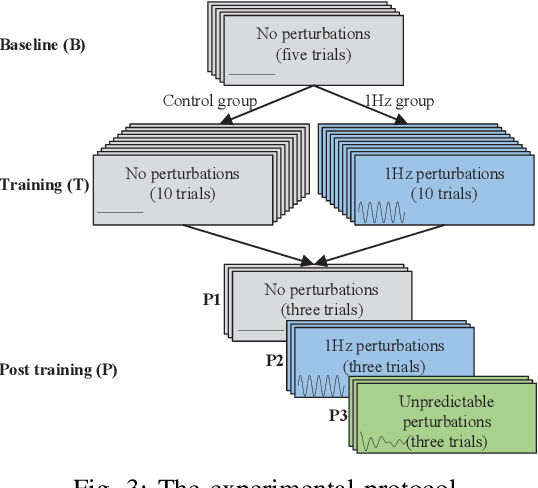
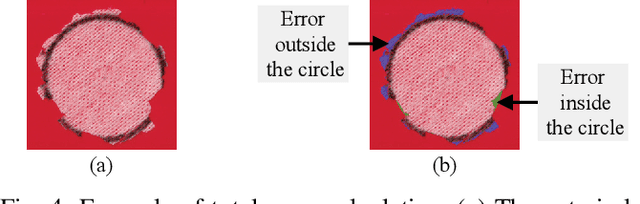
Teleoperated robot-assisted minimally-invasive surgery (RAMIS) offers many advantages over open surgery. However, there are still no guidelines for training skills in RAMIS. Motor learning theories have the potential to improve the design of RAMIS training but they are based on simple movements that do not resemble the complex movements required in surgery. To fill this gap, we designed an experiment to investigate the effect of time-dependent force perturbations on the learning of a pattern-cutting surgical task. Thirty participants took part in the experiment: (1) a control group that trained without perturbations, and (2) a 1Hz group that trained with 1Hz periodic force perturbations that pushed each participant's hand inwards and outwards in the radial direction. We monitored their learning using four objective metrics and found that participants in the 1Hz group learned how to overcome the perturbations and improved their performances during training without impairing their performances after the perturbations were removed. Our results present an important step toward understanding the effect of adding perturbations to RAMIS training protocols and improving RAMIS training for the benefit of surgeons and patients.
What Can Spatiotemporal Characteristics of Movements in RAMIS Tell Us?
Oct 16, 2017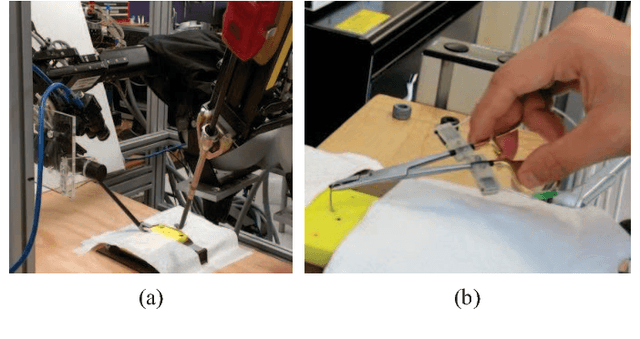
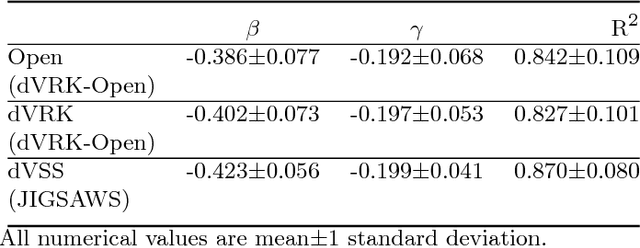
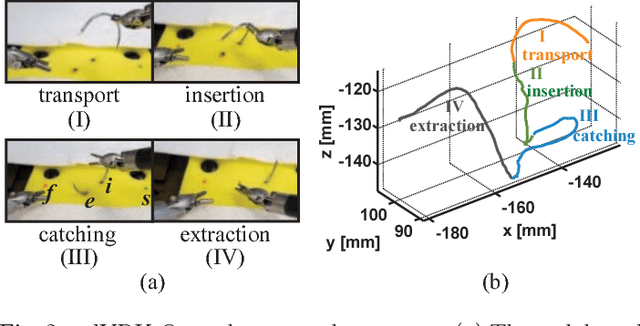

Quantitative characterization of surgical movements can improve the quality of patient care by informing the development of new training protocols for surgeons, and the design and control of surgical robots. Here, we present a novel characterization of open and teleoperated suturing movements that is based on principles from computational motor control. We focus on the extensively-studied relationship between the speed of movement and its geometry. In three-dimensional movements, this relationship is defined by the one-sixth power law that relates between the speed, the curvature, and the torsion of movement trajectories. We fitted the parameters of the one-sixth power law to suturing movements of participants with different levels of surgical experience in open (using sensorized forceps) and teleoperated (using the da Vinci Research Kit / da Vinci Surgical System) conditions from two different datasets. We found that teleoperation significantly affected the parameters of the power law, and that there were large differences between different stages of movement. These results open a new avenue for studying the effect of teleoperation on the spatiotemporal characteristics of the movements of surgeons, and lay the foundation for the development of new algorithms for automatic segmentation of surgical tasks.
Instrument Orientation-Based Metrics for Surgical Skill Evaluation in Robot-Assisted and Open Needle Driving
Sep 27, 2017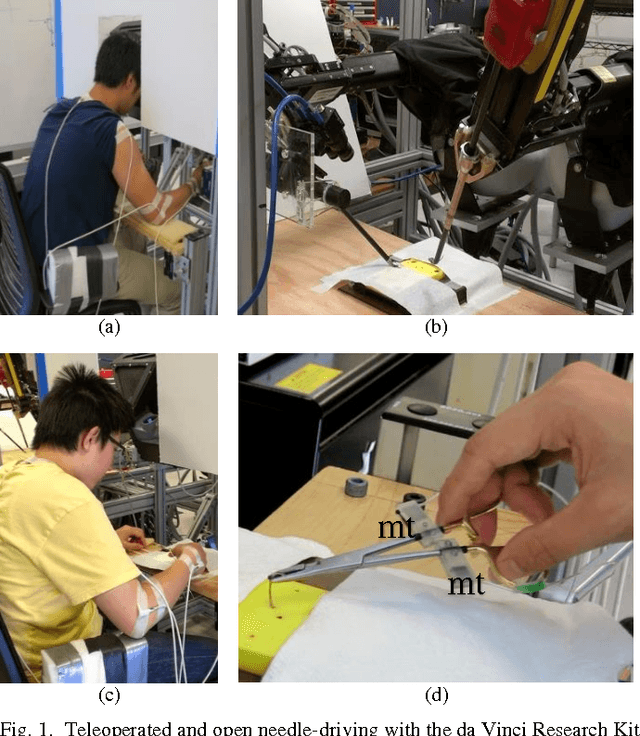
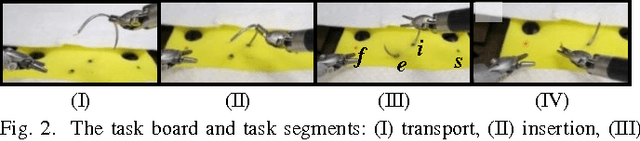
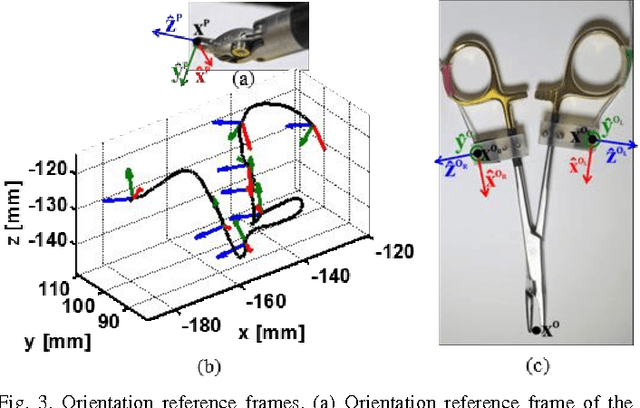
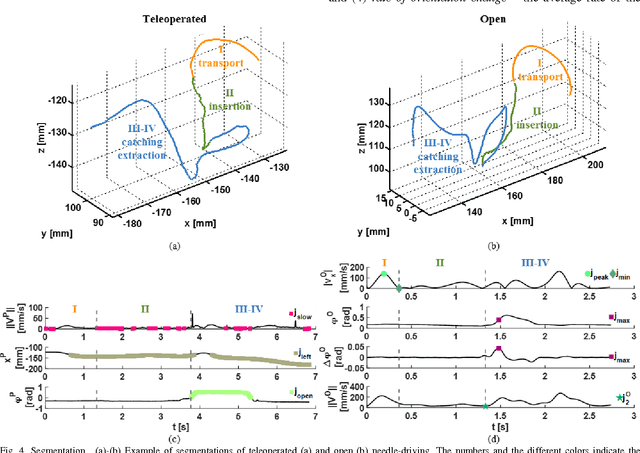
The technical skill of surgeons directly impacts patient outcomes. Advanced tracking systems enable the development of objective motion-based metrics for skill evaluation, but these metrics are not sufficient to evaluate the performance in complex surgical tasks. In this study, we developed metrics for surgical skill evaluation that are based on the orientation of the surgical instruments. Experienced robotic surgeons and novice users performed teleoperated (using the da Vinci Research Kit) and open needle-driving. Task time and the rate of orientation change successfully distinguished between experienced surgeons and novice users. Path length and the normalized angular displacement allowed for a good separation only in part of the experiment. Our new promising metrics for surgical skill evaluation captured technical aspects that are taught during surgeons' training. They provide complementing evaluation to those of classical metrics. Orientation-based metrics add value to skill assessment and may be an adjunct to classic objective metrics providing more granular discrimination of skills.