 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Time-Dependent Force Perturbations in Robot-Assisted Surgery Training
Paper and Code
May 09, 2021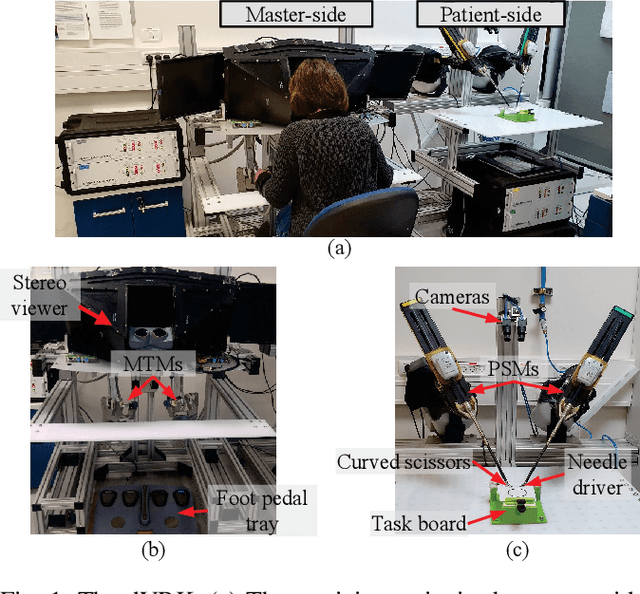
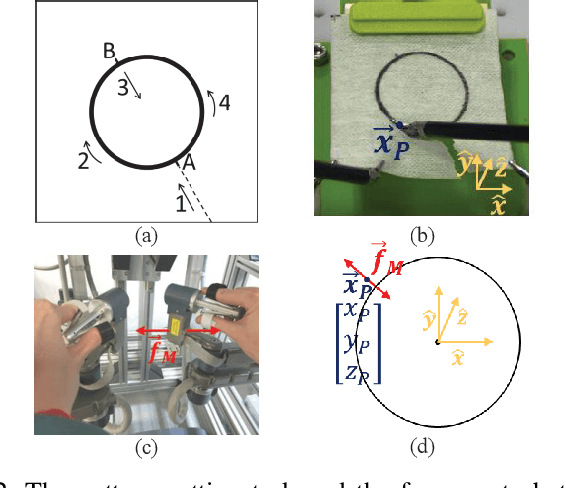
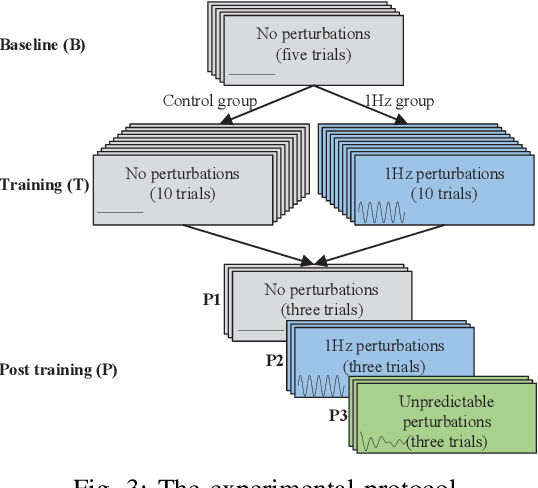
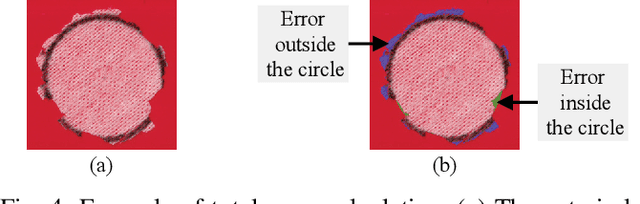
Teleoperated robot-assisted minimally-invasive surgery (RAMIS) offers many advantages over open surgery. However, there are still no guidelines for training skills in RAMIS. Motor learning theories have the potential to improve the design of RAMIS training but they are based on simple movements that do not resemble the complex movements required in surgery. To fill this gap, we designed an experiment to investigate the effect of time-dependent force perturbations on the learning of a pattern-cutting surgical task. Thirty participants took part in the experiment: (1) a control group that trained without perturbations, and (2) a 1Hz group that trained with 1Hz periodic force perturbations that pushed each participant's hand inwards and outwards in the radial direction. We monitored their learning using four objective metrics and found that participants in the 1Hz group learned how to overcome the perturbations and improved their performances during training without impairing their performances after the perturbations were removed. Our results present an important step toward understanding the effect of adding perturbations to RAMIS training protocols and improving RAMIS training for the benefit of surgeons and patients.