 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplications of Uncalibrated Image Based Visual Servoing in Micro- and Macroscale Robotics
Apr 17, 2023We present a robust markerless image based visual servoing method that enables precision robot control without hand-eye and camera calibrations in 1, 3, and 5 degrees-of-freedom. The system uses two cameras for observing the workspace and a combination of classical image processing algorithms and deep learning based methods to detect features on camera images. The only restriction on the placement of the two cameras is that relevant image features must be visible in both views. The system enables precise robot-tool to workspace interactions even when the physical setup is disturbed, for example if cameras are moved or the workspace shifts during manipulation. The usefulness of the visual servoing method is demonstrated and evaluated in two applications: in the calibration of a micro-robotic system that dissects mosquitoes for the automated production of a malaria vaccine, and a macro-scale manipulation system for fastening screws using a UR10 robot. Evaluation results indicate that our image based visual servoing method achieves human-like manipulation accuracy in challenging setups even without camera calibration.
Telerobotic Operation of Intensive Care Unit Ventilators
Oct 11, 2020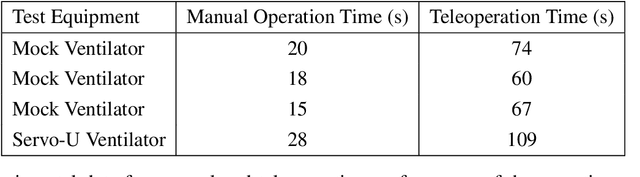
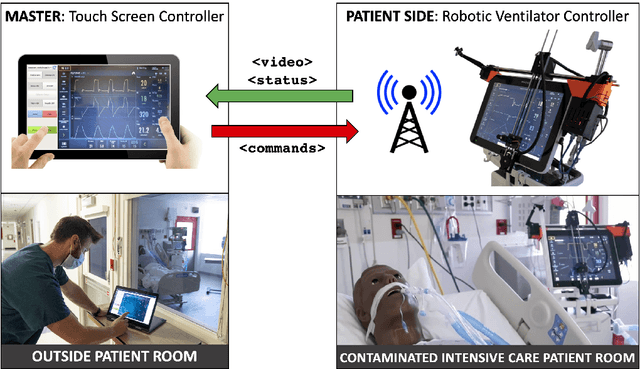
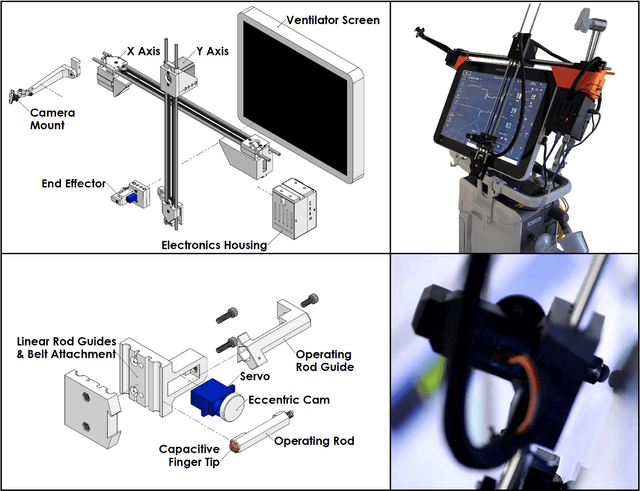
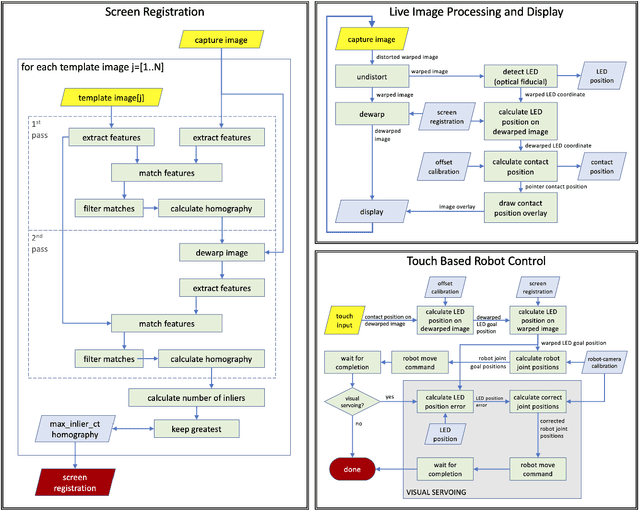
Since the first reports of a novel coronavirus (SARS-CoV-2) in December 2019, over 33 million people have been infected worldwide and approximately 1 million people worldwide have died from the disease caused by this virus, COVID-19. In the US alone, there have been approximately 7 million cases and over 200,000 deaths. This outbreak has placed an enormous strain on healthcare systems and workers. Severe cases require hospital care, and 8.5\% of patients require mechanical ventilation in an intensive care unit (ICU). One major challenge is the necessity for clinical care personnel to don and doff cumbersome personal protective equipment (PPE) in order to enter an ICU unit to make simple adjustments to ventilator settings. Although future ventilators and other ICU equipment may be controllable remotely through computer networks, the enormous installed base of existing ventilators do not have this capability. This paper reports the development of a simple, low cost telerobotic system that permits adjustment of ventilator settings from outside the ICU. The system consists of a small Cartesian robot capable of operating a ventilator touch screen with camera vision control via a wirelessly connected tablet master device located outside the room. Engineering system tests demonstrated that the open-loop mechanical repeatability of the device was 7.5\,mm, and that the average positioning error of the robotic finger under visual servoing control was 5.94\,mm. Successful usability tests in a simulated ICU environment were carried out and are reported. In addition to enabling a significant reduction in PPE consumption, the prototype system has been shown in a preliminary evaluation to significantly reduce the total time required for a respiratory therapist to perform typical setting adjustments on a commercial ventilator, including donning and doffing PPE, from 271 seconds to 109 seconds.