 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Dynamic Model Identification and Gravity Compensation for the dVRK-Si Patient Side Manipulator
Mar 12, 2026The da Vinci Research Kit (dVRK) is widely used for research in robot-assisted surgery, but most modeling and control methods target the first-generation dVRK Classic. The recently introduced dVRK-Si, built from da Vinci Si hardware, features a redesigned Patient Side Manipulator (PSM) with substantially larger gravity loading, which can degrade control if unmodeled. This paper presents the first complete kinematic and dynamic modeling framework for the dVRK-Si PSM. We derive a modified DH kinematic model that captures the closed-chain parallelogram mechanism, formulate dynamics via the Euler-Lagrange method, and express inverse dynamics in a linear-in-parameters regressor form. Dynamic parameters are identified from data collected on a periodic excitation trajectory optimized for numerical conditioning and estimated by convex optimization with physical feasibility constraints. Using the identified model, we implement real-time gravity compensation and computed-torque feedforward in the dVRK control stack. Experiments on a physical dVRK-Si show that the gravity compensation reduces steady-state joint errors by 68-84% and decreases end-effector tip drift during static holds from 4.2 mm to 0.7 mm. Computed-torque feedforward further improves transient and position tracking accuracy. For sinusoidal trajectory tracking, computed-torque feedforward reduces position errors by 35% versus gravity-only feedforward and by 40% versus PID-only. The proposed pipeline supports reliable control, high-fidelity simulation, and learning-based automation on the dVRK-Si.
Fabrication and Characterization of Additively Manufactured Stretchable Strain Sensors Towards the Shape Sensing of Continuum Robots
May 06, 2025



This letter describes the manufacturing and experimental characterization of novel stretchable strain sensors for continuum robots. The overarching goal of this research is to provide a new solution for the shape sensing of these devices. The sensors are fabricated via direct ink writing, an extrusion-based additive manufacturing technique. Electrically conductive material (i.e., the \textit{ink}) is printed into traces whose electrical resistance varies in response to mechanical deformation. The principle of operation of stretchable strain sensors is analogous to that of conventional strain gauges, but with a significantly larger operational window thanks to their ability to withstand larger strain. Among the different conductive materials considered for this study, we opted to fabricate the sensors with a high-viscosity eutectic Gallium-Indium ink, which in initial testing exhibited high linearity ($R^2 \approx$ 0.99), gauge factor $\approx$ 1, and negligible drift. Benefits of the proposed sensors include (i) ease of fabrication, as they can be conveniently printed in a matter of minutes; (ii) ease of installation, as they can simply be glued to the outside body of a robot; (iii) ease of miniaturization, which enables integration into millimiter-sized continuum robots.
Gravity Compensation of the dVRK-Si Patient Side Manipulator based on Dynamic Model Identification
Jan 31, 2025



The da Vinci Research Kit (dVRK, also known as dVRK Classic) is an open-source teleoperated surgical robotic system whose hardware is obtained from the first generation da Vinci Surgical System (Intuitive, Sunnyvale, CA, USA). The dVRK has greatly facilitated research in robot-assisted surgery over the past decade and helped researchers address multiple major challenges in this domain. Recently, the dVRK-Si system, a new version of the dVRK which uses mechanical components from the da Vinci Si Surgical System, became available to the community. The major difference between the first generation da Vinci and the da Vinci Si is in the structural upgrade of the Patient Side Manipulator (PSM). Because of this upgrade, the gravity of the dVRK-Si PSM can no longer be ignored as in the dVRK Classic. The high gravity offset may lead to relatively low control accuracy and longer response time. In addition, although substantial progress has been made in addressing the dynamic model identification problem for the dVRK Classic, further research is required on model-based control for the dVRK-Si, due to differences in mechanical components and the demand for enhanced control performance. To address these problems, in this work, we present (1) a novel full kinematic model of the dVRK-Si PSM, and (2) a gravity compensation approach based on the dynamic model identification.
Towards a Physics Engine to Simulate Robotic Laser Surgery: Finite Element Modeling of Thermal Laser-Tissue Interactions
Nov 21, 2024



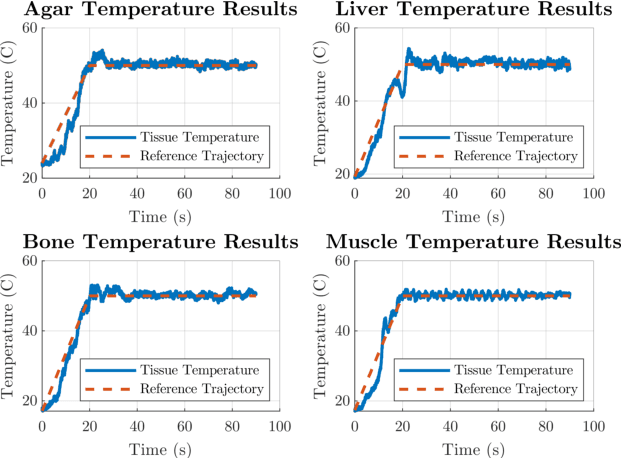
This paper presents a computational model, based on the Finite Element Method (FEM), that simulates the thermal response of laser-irradiated tissue. This model addresses a gap in the current ecosystem of surgical robot simulators, which generally lack support for lasers and other energy-based end effectors. In the proposed model, the thermal dynamics of the tissue are calculated as the solution to a heat conduction problem with appropriate boundary conditions. The FEM formulation allows the model to capture complex phenomena, such as convection, which is crucial for creating realistic simulations. The accuracy of the model was verified via benchtop laser-tissue interaction experiments using agar tissue phantoms and ex-vivo chicken muscle. The results revealed an average root-mean-square error (RMSE) of less than 2 degrees Celsius across most experimental conditions.
A Starter's Kit for Concentric Tube Robots
Jul 09, 2024

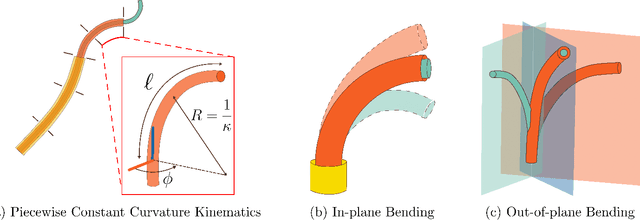

Concentric Tube Robots (CTRs) have garnered significant interest within the surgical robotics community because of their flexibility, dexterity, and ease of miniaturization. However, mastering the unique kinematics and design principles of CTRs can be challenging for newcomers to the field. In this paper, we present an educational kit aimed at lowering the barriers to entry into concentric tube robot research. Our goal is to provide accessible learning resources for CTRs, bridging the knowledge gap between traditional robotic arms and these specialized devices. The proposed kit includes (1) An open-source design and assembly instructions for an economical (cost of materials $\approx$ 700 USD) modular CTR; (2) A set of self-study materials to learn the basics of CTR modeling and control, including automatically-graded assignments. To evaluate the effectiveness of our educational kit, we conducted a human subjects study involving first-year graduate students in engineering. Over a four-week period, participants -- none of whom had any prior knowledge of concentric tube robots -- successfully built their first CTR using the provided materials, implemented the robot's kinematics in MATLAB, and conducted a tip-tracking experiment with an optical tracking device. Our findings suggest that the proposed kit facilitates learning and hands-on experience with CTRs, and furthermore, it has the potential to help early-stage graduate students get rapidly started with CTR research. By disseminating these resources, we hope to broaden participation in concentric tube robot research to a wider a more diverse group of researchers.
FDM Printing: a Fabrication Method for Fluidic Soft Circuits?
Dec 02, 2023



Existing fluidic soft logic gates for the control of soft robots either rely on extensive manual fabrication processes or expensive printing techniques. In our work, we explore Fused Deposition Modeling for creating fully 3D printed fluidic logic gates. We print a soft bistable valve from thermoplastic polyurethane using a desktop FDM printer. We introduce a new printing nozzle for extruding tubing. Our fabrication strategy reduces the production time of soft bistable valves from 27 hours with replica molding to 3 hours with a FDM printer. Our rapid and cost-effective fabrication process for fluidic logic gates seeks to democratize fluidic circuitry for the control of soft robots.
Losing Focus: Can It Be Useful in Robotic Laser Surgery?
Apr 19, 2023
This paper proposes a method to regulate the tissue temperature during laser surgery by robotically controlling the laser focus. Laser-tissue interactions are generally considered hard to control due to the inherent inhomogeneity of biological tissue, which can create significant variability in its thermal response to laser irradiation. In this study, we use methods from nonlinear control theory to synthesize a temperature controller capable of working on virtually any tissue type without any prior knowledge of its physical properties. The performance of the controller is evaluated in ex-vivo experiments.
Light in the Larynx: a Miniaturized Robotic Optical Fiber for In-office Laser Surgery of the Vocal Folds
Apr 27, 2022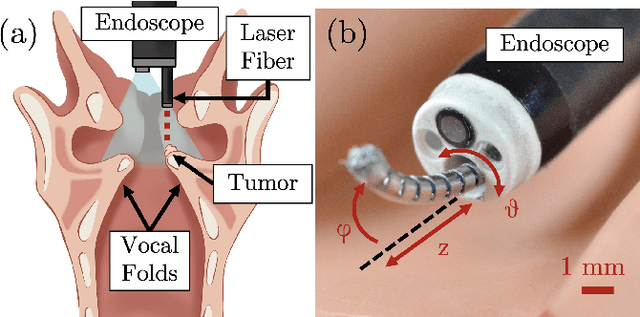
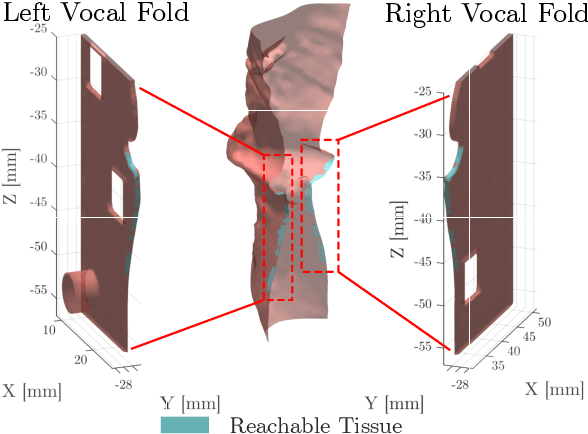
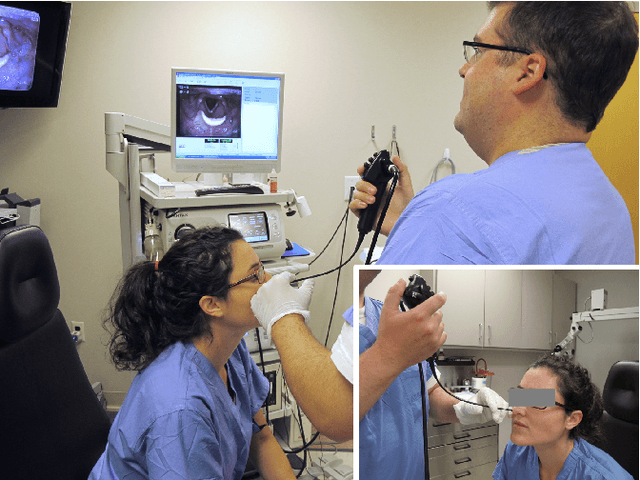
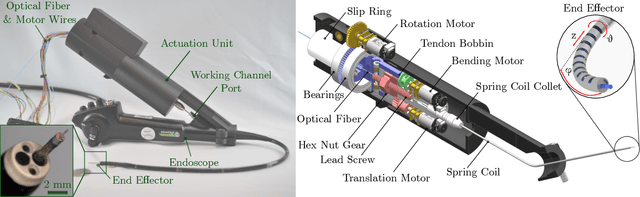
This letter reports the design, construction, and experimental validation of a novel hand-held robot for in-office laser surgery of the vocal folds. In-office endoscopic laser surgery is an emerging trend in Laryngology: It promises to deliver the same patient outcomes of traditional surgical treatment (i.e., in the operating room), at a fraction of the cost. Unfortunately, office procedures can be challenging to perform; the optical fibers used for laser delivery can only emit light forward in a line-of-sight fashion, which severely limits anatomical access. The robot we present in this letter aims to overcome these challenges. The end effector of the robot is a steerable laser fiber, created through the combination of a thin optical fiber (0.225 mm) with a tendon-actuated Nickel-Titanium notched sheath that provides bending. This device can be seamlessly used with most commercially available endoscopes, as it is sufficiently small (1.1 mm) to pass through a working channel. To control the fiber, we propose a compact actuation unit that can be mounted on top of the endoscope handle, so that, during a procedure, the operating physician can operate both the endoscope and the steerable fiber with a single hand. We report simulation and phantom experiments demonstrating that the proposed device substantially enhances surgical access compared to current clinical fibers.
Multi Jet Fusion of Nylon-12: A Viable Method to 3D-print Concentric Tube Robots?
Apr 01, 2022
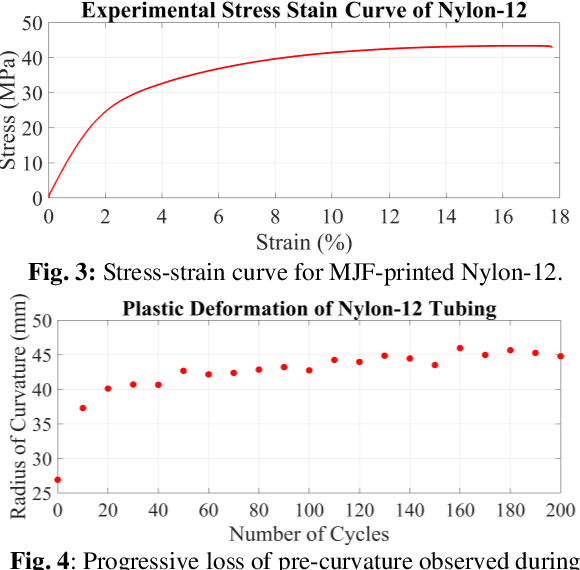
In this paper, we present a study on the viability of fabricating Concentric Tube Robots using Multi Jet Fusion (MJF) of Nylon-12, a type of elastic polymer commonly used in additive manufacturing. We note that Nylon-12 was already evaluated for the purpose of building CTRs in prior work, but fabrication was performed with Selective Laser Sintering (SLS), which produced unsatisfactory results. Our study is the first study to evaluate the suitability of MJF to 3Dprint CTRs.
* in press