 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Starter's Kit for Concentric Tube Robots
Jul 09, 2024

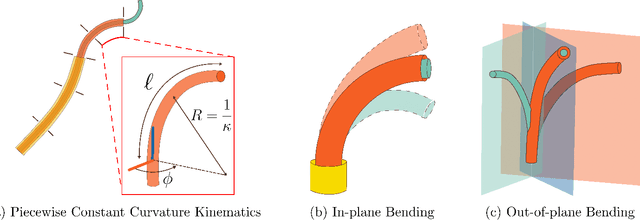

Concentric Tube Robots (CTRs) have garnered significant interest within the surgical robotics community because of their flexibility, dexterity, and ease of miniaturization. However, mastering the unique kinematics and design principles of CTRs can be challenging for newcomers to the field. In this paper, we present an educational kit aimed at lowering the barriers to entry into concentric tube robot research. Our goal is to provide accessible learning resources for CTRs, bridging the knowledge gap between traditional robotic arms and these specialized devices. The proposed kit includes (1) An open-source design and assembly instructions for an economical (cost of materials $\approx$ 700 USD) modular CTR; (2) A set of self-study materials to learn the basics of CTR modeling and control, including automatically-graded assignments. To evaluate the effectiveness of our educational kit, we conducted a human subjects study involving first-year graduate students in engineering. Over a four-week period, participants -- none of whom had any prior knowledge of concentric tube robots -- successfully built their first CTR using the provided materials, implemented the robot's kinematics in MATLAB, and conducted a tip-tracking experiment with an optical tracking device. Our findings suggest that the proposed kit facilitates learning and hands-on experience with CTRs, and furthermore, it has the potential to help early-stage graduate students get rapidly started with CTR research. By disseminating these resources, we hope to broaden participation in concentric tube robot research to a wider a more diverse group of researchers.
Soft Fluidic Closed-Loop Controller for Untethered Underwater Gliders
Mar 15, 2023
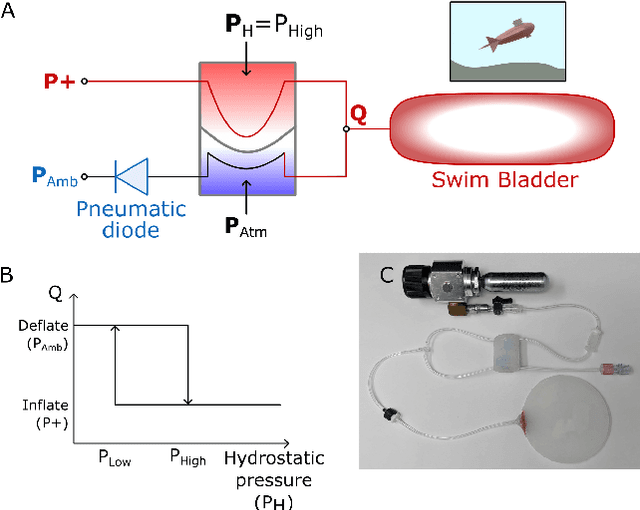
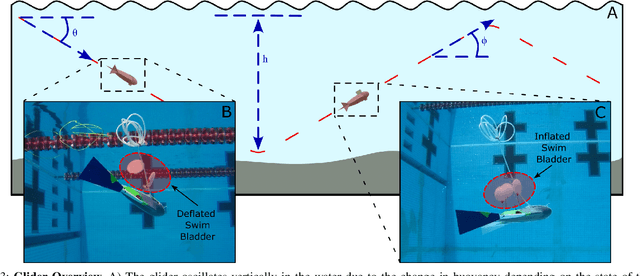
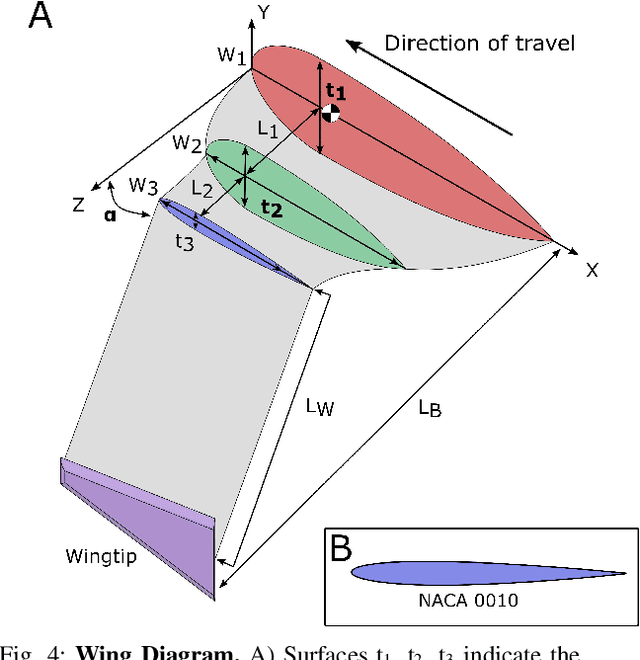
Soft underwater robots typically explore bioinspired designs at the expense of power efficiency when compared to traditional underwater robots, which limits their practical use in real-world applications. We leverage a fluidic closed-loop controller to actuate a passive underwater glider. A soft hydrostatic pressure sensor is configured as a bangbang controller actuating a swim bladder made from silicone balloons. Our underwater glider oscillates between the water surface and 4 m depth while traveling 15 m translational. The fluidic underwater glider demonstrates a power efficiency of 28 mW/m. This work demonstrates a low-cost and power-efficient underwater glider and non-electronic controller. Due to its simple design, low cost, and ease of fabrication using FDM printing and soft lithography, it serves as a starting point for the exploration of non-electronic underwater soft robots.