 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Fluidic Closed-Loop Controller for Untethered Underwater Gliders
Mar 15, 2023
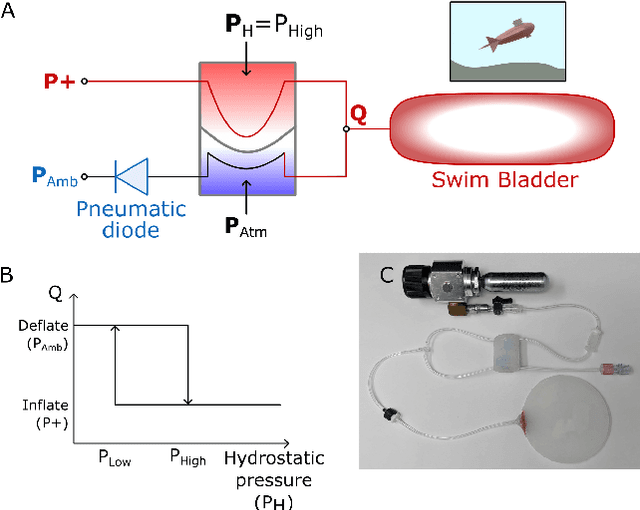
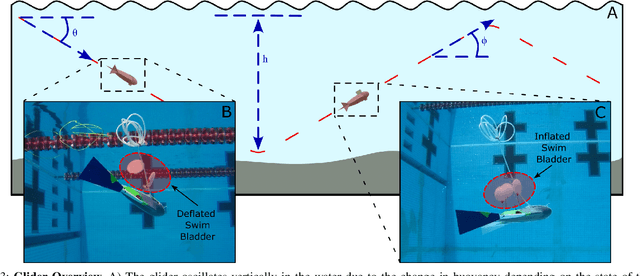
Soft underwater robots typically explore bioinspired designs at the expense of power efficiency when compared to traditional underwater robots, which limits their practical use in real-world applications. We leverage a fluidic closed-loop controller to actuate a passive underwater glider. A soft hydrostatic pressure sensor is configured as a bangbang controller actuating a swim bladder made from silicone balloons. Our underwater glider oscillates between the water surface and 4 m depth while traveling 15 m translational. The fluidic underwater glider demonstrates a power efficiency of 28 mW/m. This work demonstrates a low-cost and power-efficient underwater glider and non-electronic controller. Due to its simple design, low cost, and ease of fabrication using FDM printing and soft lithography, it serves as a starting point for the exploration of non-electronic underwater soft robots.
Printable Flexible Robots for Remote Learning
Jul 15, 2022
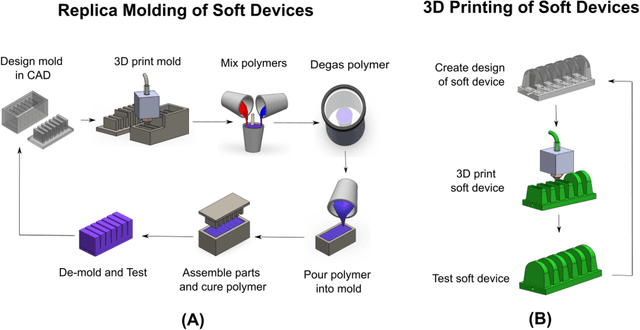
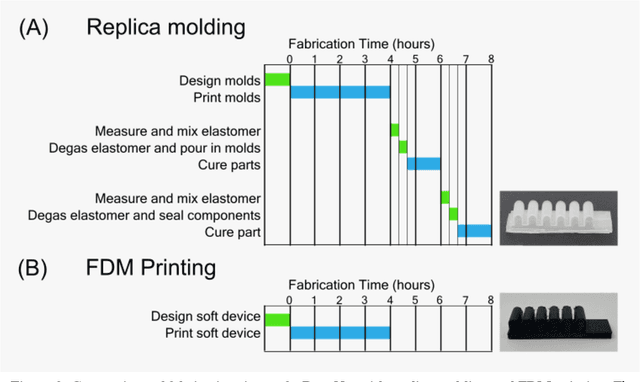
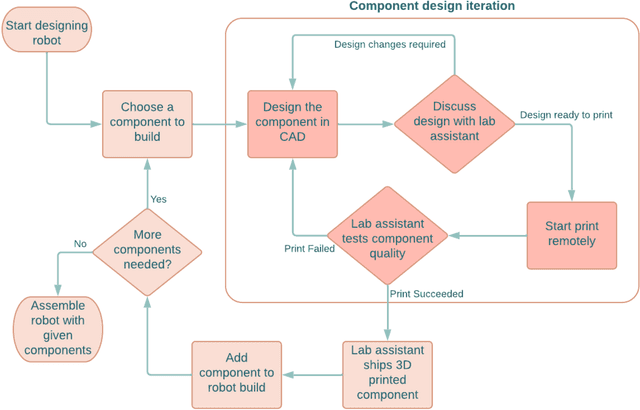
The COVID-19 pandemic has revealed the importance of digital fabrication to enable online learning, which remains a challenge for robotics courses. We introduce a teaching methodology that allows students to participate remotely in a hands-on robotics course involving the design and fabrication of robots. Our methodology employs 3D printing techniques with flexible filaments to create innovative soft robots; robots are made from flexible, as opposed to rigid, materials. Students design flexible robotic components such as actuators, sensors, and controllers using CAD software, upload their designs to a remote 3D printing station, monitor the print with a web camera, and inspect the components with lab staff before being mailed for testing and assembly. At the end of the course, students will have iterated through several designs and created fluidically-driven soft robots. Our remote teaching methodology enables educators to utilize 3D printing resources to teach soft robotics and cultivate creativity among students to design novel and innovative robots. Our methodology seeks to democratize robotics engineering by decoupling hands-on learning experiences from expensive equipment in the learning environment.
The Soft Compiler: A Web-Based Tool for the Design of Modular Pneumatic Circuits for Soft Robots
Feb 08, 2022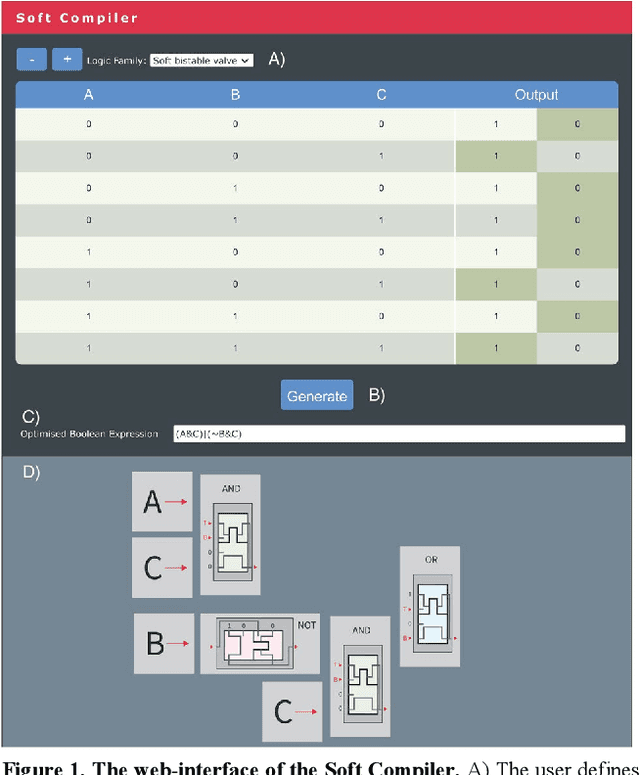
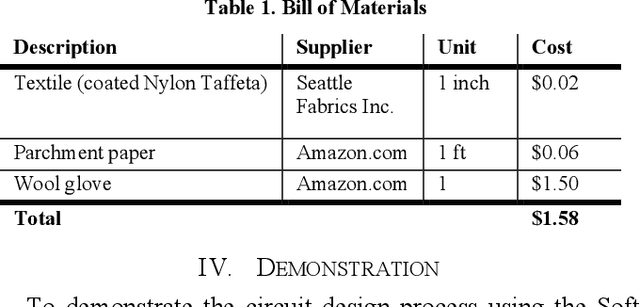
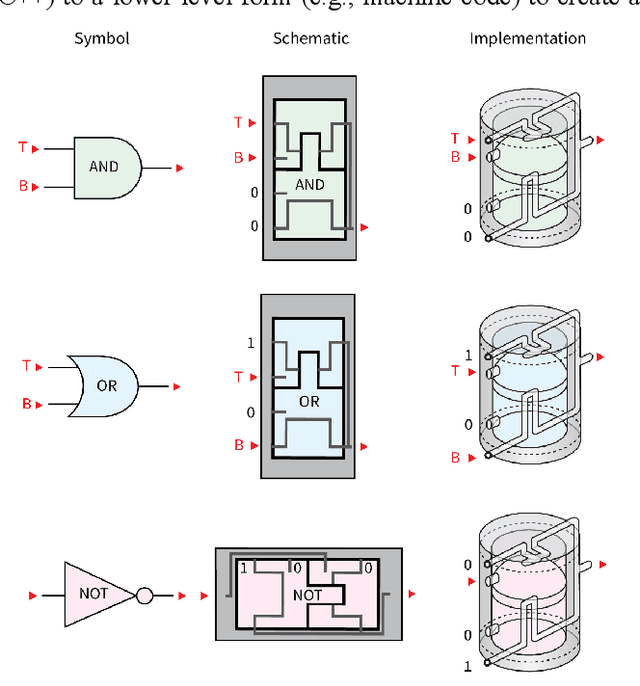
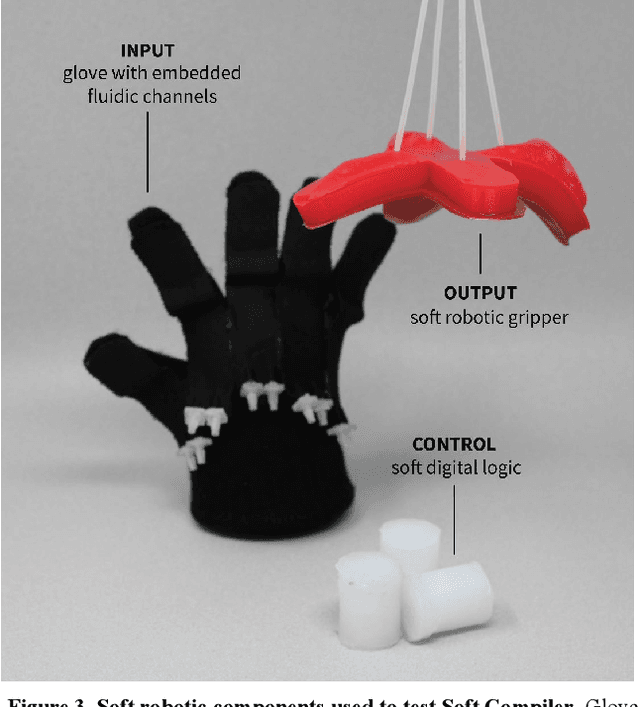
Developing soft circuits from individual soft logic gates poses a unique challenge: with increasing numbers of logic gates, the design and implementation of circuits leads to inefficiencies due to mathematically unoptimized circuits and wiring mistakes during assembly. It is therefore practically important to introduce design tools that support the development of soft circuits. We developed a web-based graphical user interface, the Soft Compiler, that accepts a user-defined robot behavior as a truth table to generate a mathematically optimized circuit diagram that guides the assembly of a soft fluidic circuit. We describe the design and experimental verification of three soft circuits of increasing complexity, using the Soft Compiler as a design tool and a novel pneumatic glove as an input interface. In one example, we reduce the size of a soft circuit from the original 11 logic gates to 4 logic gates while maintaining circuit functionality. The Soft Compiler is a web-based design tool for fluidic, soft circuits and published under open-source MIT License.